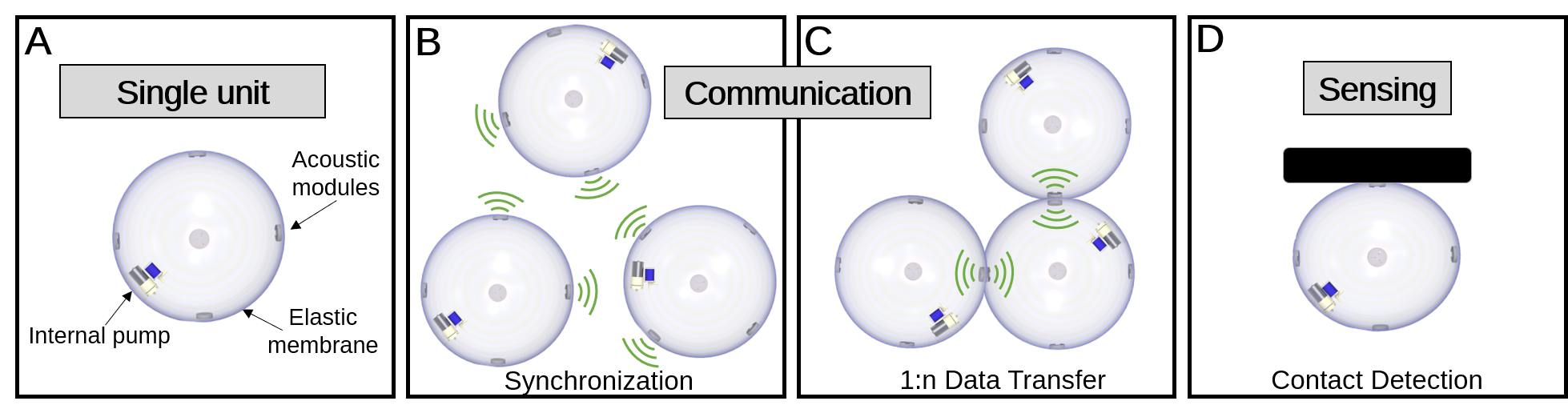
Modular soft robots combine the strengths of two traditionally separate areas of robotics. As modular robots, they can show robustness to individual failure and reconfigurability; as soft robots, they can deform and undergo large shape changes in order to adapt to their environment, and have inherent human safety. However, for sensing and communication these robots also combine the challenges of both: they require solutions that are scalable (low cost and complexity) and efficient (low power) to enable collectives of large numbers of robots, and these solutions must also be able to interface with the high extension ratio elastic bodies of soft robots. In this work, we seek to address these challenges using acoustic signals produced by piezoelectric surface transducers that are cheap, simple, and low power, and that not only integrate with but also leverage the elastic robot skins for signal transmission. Importantly, to further increase scalability, the transducers exhibit multi-functionality made possible by a relatively flat frequency response across the audible and ultrasonic ranges. With minimal hardware, they enable directional contact-based communication, audible-range communication at a distance, and exteroceptive sensing. We demonstrate a subset of the decentralized collective behaviors these functions make possible with multi-robot hardware implementations. The use of acoustic waves in this domain is shown to provide distinct advantages over existing solutions.
翻译:模块软机器人结合了两个传统上独立的机器人领域的优势。 作为模块机器人,它们可以显示个人故障和可重新配置的强力;作为软机器人,它们可以变形并进行巨大的形状变化,以适应环境,并具有固有的人身安全。然而,在感应和通信方面,这些机器人也可以将两者的挑战结合起来:它们需要可缩放(成本和复杂性低)和高效(低功率)的解决方案,使大量机器人能够聚集在一起,而这些解决方案也必须能够与软机器人的高扩展比弹性体相接。在这项工作中,我们力求利用廉价、简单和低功率的压电介质发电器产生的音响信号来应对这些挑战,不仅与弹性机器人皮质皮肤结合,而且利用它们来传递信号。重要的是,为了进一步提高可缩放(成本和复杂性)和高效(低功率)的机器人展示出多种功能,它们可以通过在听力和超声波范围内较固定的频率反应而产生多种功能。在最小的硬件上,它们能够使定向接触解决方案、可感应的域空间通信能够展示一种分化的移动的移动空间功能。