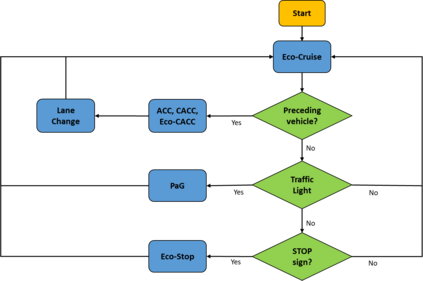
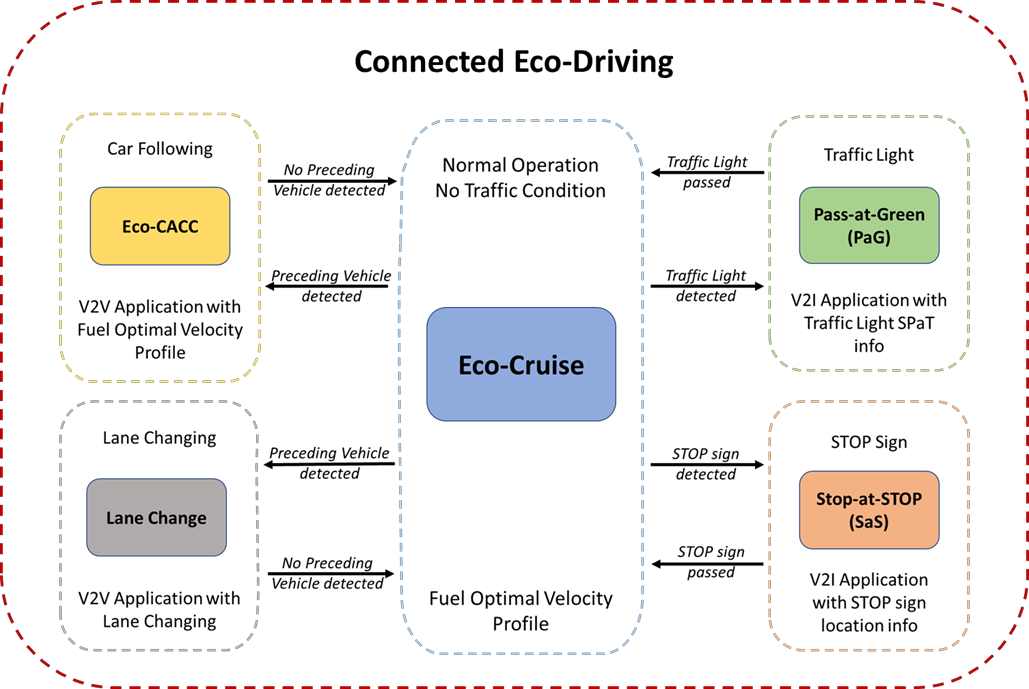
In this paper, a comprehensive Eco-Driving strategy for CAVs is presented. In this setup, multiple driving modes calculate speed profiles ideal for their own set of constraints simultaneously to save fuel as much as possible, while a High Level (HL) controller ensures smooth transitions between the driving modes for Eco-Driving. This Eco-Driving deterministic controller for an ego CAV was equipped with Vehicle-to-Infrastructure (V2I) and Vehicle-to-Vehicle (V2V) algorithms. Simulation results are used to show that the HL controller ensures significant fuel economy improvement as compared to baseline driving modes with no collisions between the ego CAV and traffic vehicles while the driving mode of the ego CAV was set correctly under changing constraints.
翻译:在本文中,介绍了一个综合的CAV生态驱动战略。在这个设置中,多种驱动模式计算速度剖面,以尽可能节省燃料,同时根据其自身的一组制约因素来计算理想速度剖面,而高级控制器则确保了生态驱动模式之间的平稳过渡。这个自我驱动控制器的生态驱动确定式控制器配备了车辆对基础设施(V2I)和车辆对车辆(V2V)的算法。 模拟结果表明,HL控制器与基线驱动模式相比,确保了燃料经济的重大改善,而自我驱动控制器与交通车辆之间没有碰撞,而自我驱动器的驱动式在不断变化的制约下设定得当。