【CSIG奖励访谈】2021年度CSIG科技进步奖二等奖 “面向设计自动化的智能机器人系统关键技术及应用”团队

CSIG科技进步奖授予在我国图像图形学领域应用推广先进科学技术成果,完成重大科学技术工程、计划、项目等方面,做出突出贡献的个人和团队。
为宣传科技工作者积极进取的工作精神,聚焦获奖团队背后的故事,学会近日对荣获2021年度CSIG科技进步奖二等奖“面向设计自动化的智能机器人系统关键技术及应用”的项目团队进行了专访,以对话的形式,为读者们提供一次了解他们的机会。
下面就跟着我们的脚步,走近今天的受访团队吧。
问题一:首先非常感谢各位老师接受我们的采访,请先介绍一下团队成员:

本团队是由汕头大学、华南理工大学、华南农业大学等多个单位所构成,长期专注于人工智能、智能机器人、机器人及图像处理等前沿研究领域,一直倡导将前沿性基础研究成果与国民经济发展和国家重大需求紧密相连。目前,团队成员包括国家级高层次人才、国际顶级学术期刊IEEE Transaction on Evolutionary Computation副主编、入选斯坦福大学2021全球前2%顶尖科学家榜单人员等。该研究团队已发表论文200余篇,申请专利180余项,已获授权专利80余项。研究成果获得中国产学研合作创新奖、国家级创新技术优胜奖、中国软件设计大赛优秀指导教师奖、中国自动化学会科普奖 、广东省科技进步一等奖等。
问题二:了解完了团队内的各位老师,请为大家简单的介绍一下项目的情况:
我国工业机器人在设计上主要采用逆向设计,正向设计能力和水平是制约我国工业机器人向原创化发展的重要瓶颈问题。本项目深入开展了面向设计自动化的智能机器人系统关键技术及应用研究,主要创新点包括:1)针对智能机器人系统的优化问题,构建了难度可调和可扩展的约束多目标测试问题集,提出了基于Push和Pull搜索框架的约束多目标算法,为智能机器人系统优化提供了有效的算法和技术支撑。2)围绕智能机器人系统的设计自动化,建立了融合方程式、键合图和几何模型的多角度融合模型,提出了智能机器人“肢-脑-眼”集成设计的统一图模型表达方法,实现了从机器人本体、控制器到机器人视觉系统的自动化设计。3)在智能机器人系统多模态视觉感知方面,提出了图像去雨、去雾预处理方法,提出了对运动目标进行精准定位方法以及基于图像的物理属性测量方法,提高了机器人系统的感知和适应能力。
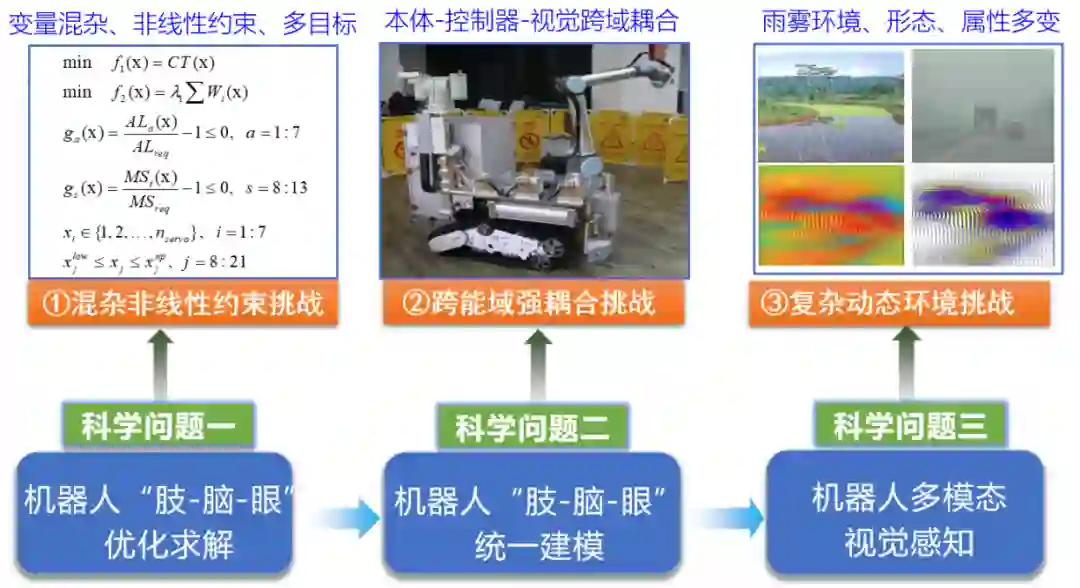
图 1 面向设计自动化的智能机器人系统关键技术
问题三:请问各位老师在科研过程中,有没有什么好的方法可以推荐给大家?
问题四:在项目的研究过程中有遇到什么困难吗?大家是如何解决的呢?
比较长的一段时间,实验室的同学们比较习惯于跟风现有的研究工作,而缺乏科研中的开创精神。如何实现“从0到1”的突破,成为某个领域领航者呢?我们的体会是:关键在于提升同学们的“思辨”和“表达”能力,并提出一个好的研究问题。发现好的研究问题好似剥洋葱的过程。我们需要不断的大胆假设、自我否定和质疑,对问题进行层层剥离和分析,才能逐步逼近事物的本质,进而抓住主要矛盾,提出一个好的研究问题。
问题五:最后,大家有什么获奖感言想说呢?