CVPR 2020 Oral 出炉!5篇 Oral 论文抢先看
加入极市专业CV交流群,与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度 等名校名企视觉开发者互动交流!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。关注 极市平台 公众号 ,回复 加群,立刻申请入群~
在2月24日,CVPR 2020 公布接收论文结果公布,从 6656 篇有效投稿中录取了 1470 篇论文,录取率约为 22%。昨天,CVPR Oral结果公布了。有大佬已经分享了自己的工作,本文整理了5篇已中Oral的论文,分享给大家阅读。
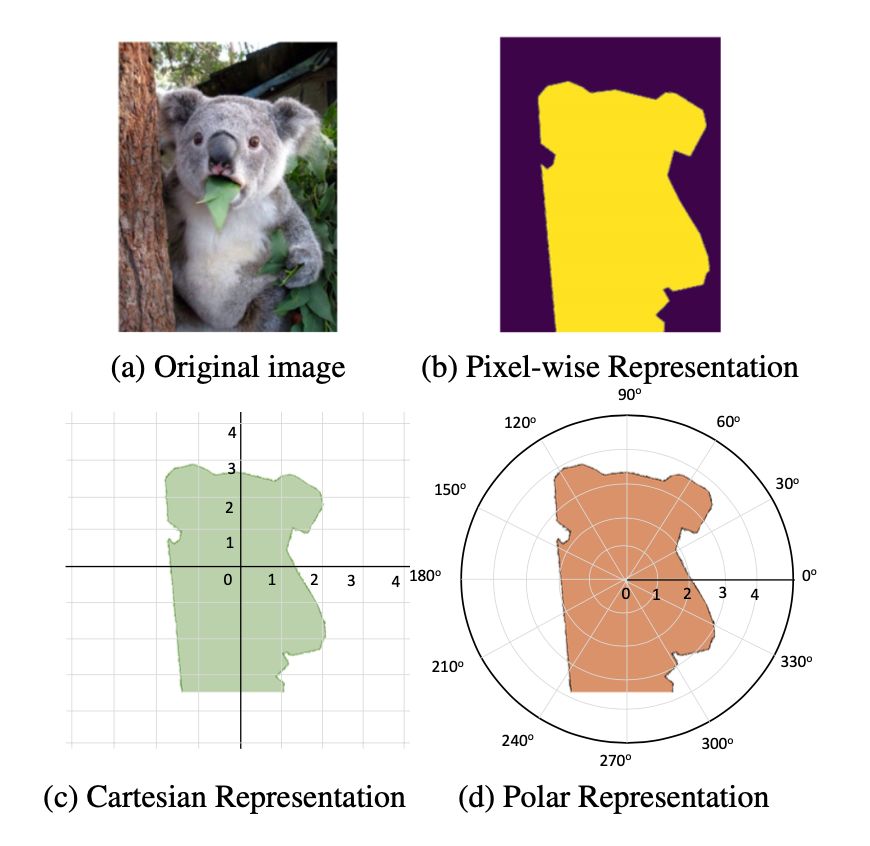
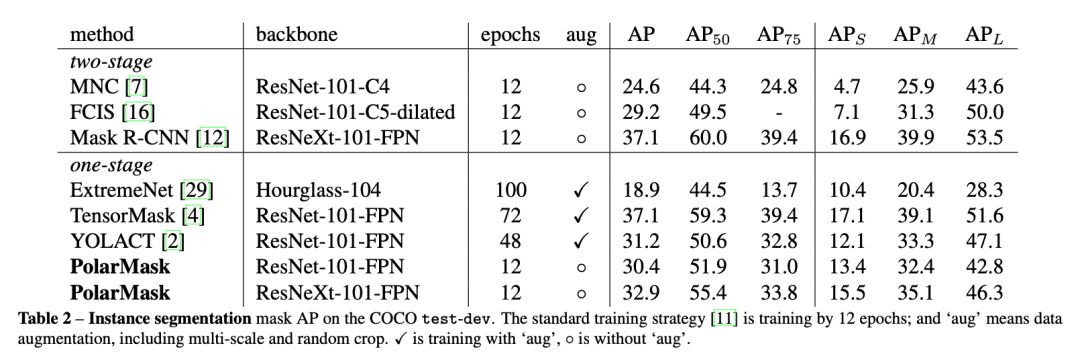
1.PolarMask: 一阶段实例分割新思路[1,2]
论文地址:https://arxiv.org/abs/1909.13226
代码:https://github.com/xieenze/PolarMask
来自作者本人的详细解读:PolarMask: 一阶段实例分割新思路
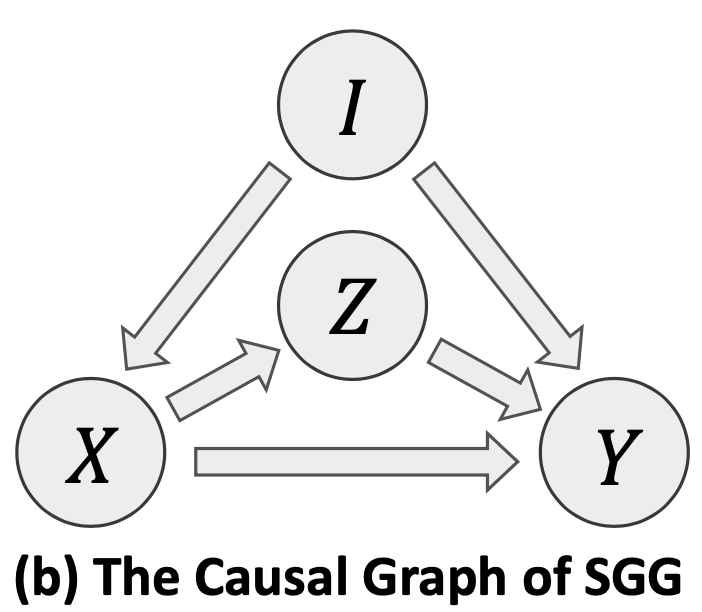
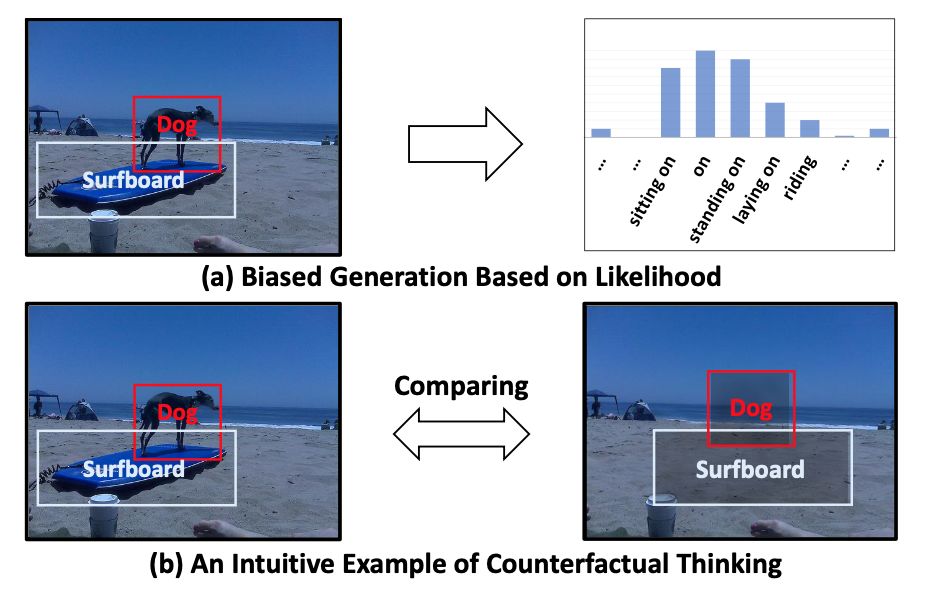
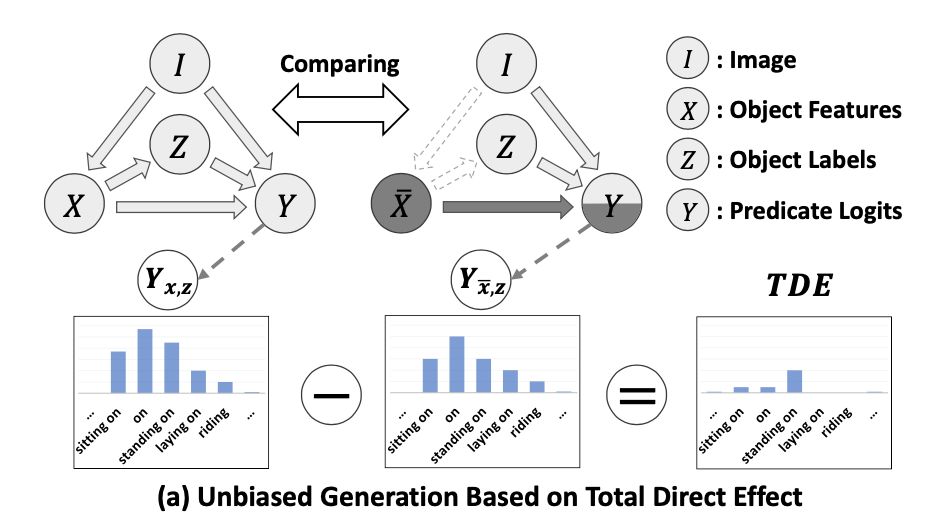
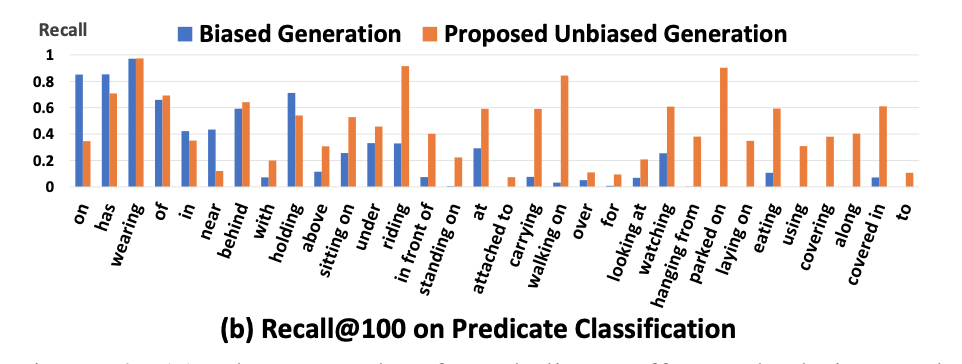
2.Scene Graph Generation开源框架[3,4]
论文代码:https://github.com/KaihuaTang/Scene-Graph-Benchmark.pytorch
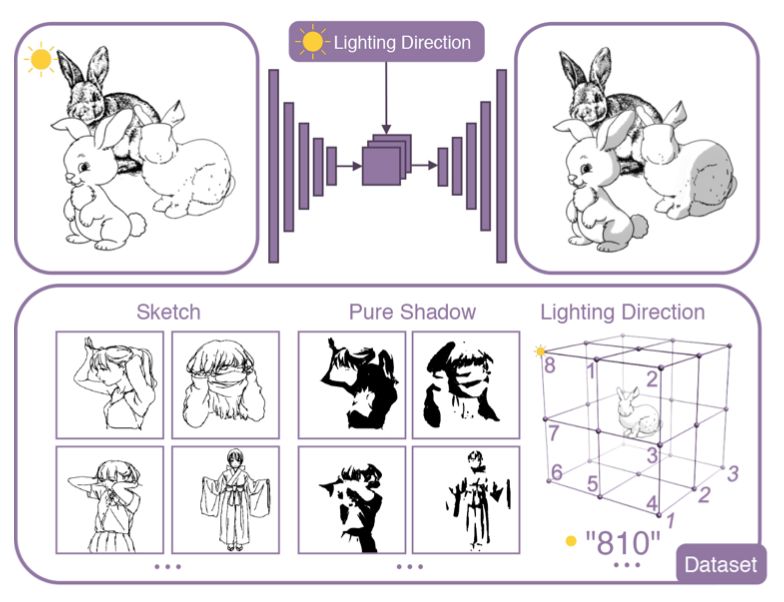
3. Learning to Shade Hand-drawn Sketches[5]

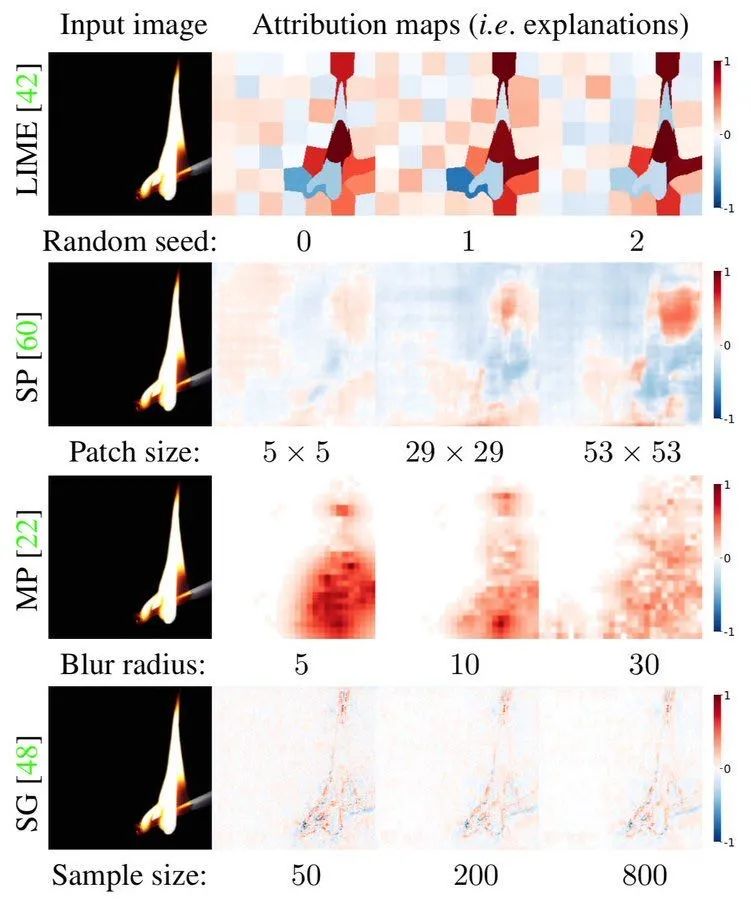
4. SAM: The Sensitivity of Attribution Methods to Hyperparameters[6]
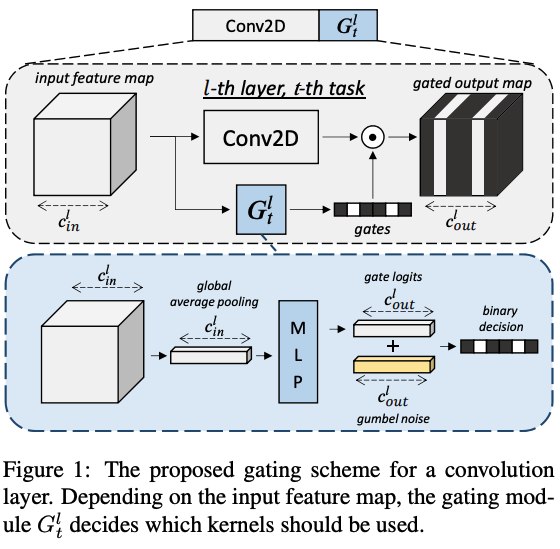
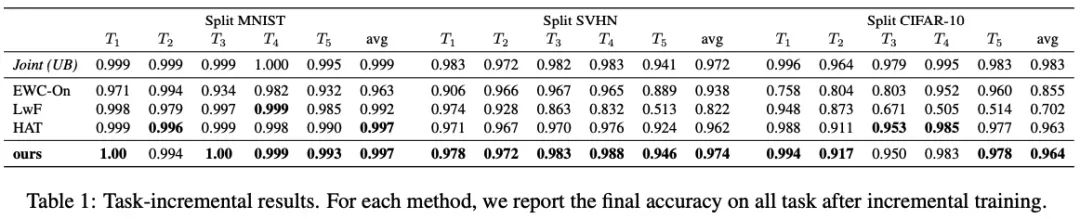
5.Conditional Channel Gated Networks for Task-Aware Continual Learning
参考文献
[1] https://zhuanlan.zhihu.com/p/84890413
[2] https://arxiv.org/abs/1909.13226
[3] https://zhuanlan.zhihu.com/p/109657521
[4] https://arxiv.org/abs/2002.11949
[5] https://arxiv.org/abs/2002.11812
[6] http://s.anhnguyen.me/sam_cvpr2020.pdf
大合集!80篇CVPR2020论文分方向整理: 目标检测/图像分割/姿态估计等,附打包下载
CVPR2019最全整理:全部论文下载,Github源码汇总、直播视频、论文解读等
2000~2019年历届CVPR最佳论文,代码及解读汇总
极市平台视觉算法季度赛,提供真实应用场景数据和免费算力,特殊时期,一起在家打比赛吧!
添加极市小助手微信(ID : cv-mart),备注:研究方向-姓名-学校/公司-城市(如:目标检测-小极-北大-深圳),即可申请加入目标检测、目标跟踪、人脸、工业检测、医学影像、三维&SLAM、图像分割等极市技术交流群,更有每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、行业技术交流,一起来让思想之光照的更远吧~

△长按添加极市小助手

△长按关注极市平台,获取最新CV干货
觉得有用麻烦给个在看啦~




