第一视角开高达?!直接坐进驾驶舱操控VR抓材料,比挖掘机还灵活

大数据文摘出品
作者:Caleb
熟悉日本动漫的小伙伴肯定对机战不会陌生。
比如最受追捧和喜爱的《机动战士高达》,自1979年初次登场以来,高达已然成为了日本动画中最著名、庞大且经久不衰的系列之一。
炫酷的机体和激烈的战斗不知道成为了多少人的童年回忆。

不知道有多少小伙伴和文摘菌一样,总想着要是自己也能开个高达,那该有多拉风啊~
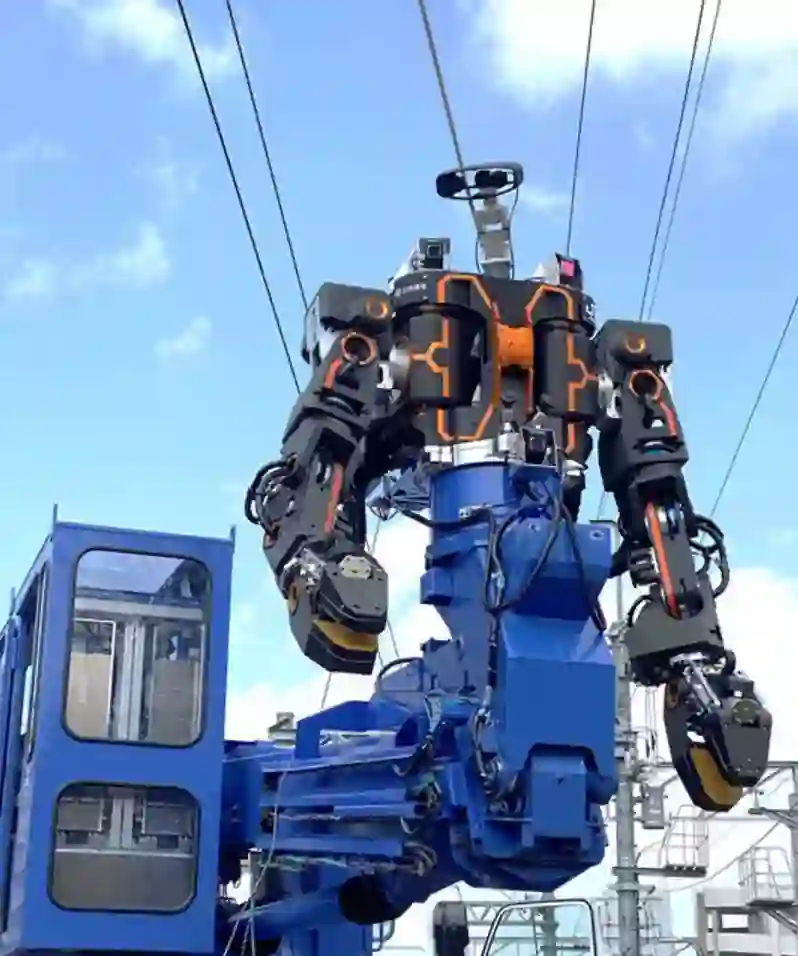
最近,日本一家铁路公司还真就做了这么一个“高达”机器人,不过这可不是拿来战斗的,而是代替人类从事高空作业等一些难度系数较高的工作。
厉害的是,机器人的控制是通过佩戴VR设备的驾驶员在工程车内进行的,也就是说,驾驶“高达”的梦想就这么实现了?!
第一视角开“高达”,力大飞砖还能卖萌挥手
西日本铁道和人机一体、日本信号两家公司共同开发的这款重型机械名叫“零式人机 ver.2.0”。
整体来说,零式人机是重型机器人与工程车的结合体,系统配备了一种独立开发的力控制技术,该技术甚至可以精确控制电动执行器的力,以及双边控制技术,使操作者可以感受到机器人的触感。
而重型机器人则可以通过远程控制精确操作。

这套机械在国际机器人展上曾亮相过,接下来我们就来一睹零式人机的风采。
在现场演示时,机器人轻松地取下了一根管子,来回摇摆,这就足以证明手臂的抓取能力和灵活性:

然后把管子换到另一只手上:

重新挂上横杆:

整个过程非常稳定,动作也都没有出现一丝摇摆。
可以看到,机器人基本可以抓取各种材料,不受形状限制,也就是说它的应用前景是非常广泛的。
除此之外,机器人还能够在操作员站在地面上时进行高空作业,这也提高了工作安全性。
现场演示时,在实现了上述高难度动作的前提下,却只有一个工作人员进行控制,还亲切地向大家挥手:

据了解,零式人机主要就是通过交互式动作进行操作,操作员的操作与机器人的动作直接联系,机器人收到的重量和反冲力反馈给操作员,这样操作员也能更容易上手学习。
根据TBS报道,驾驶员会在工程车里操作,通过VR头盔和操控器来控制整个机器人的身体。当驾驶员转头,机器人的头部也会随之转动,视野也会调整到对应的方向:

操控机械臂时,就像是操控自己的双手,通过VR设备可以看清自己的操作:

这种第一视角操作,简直不要太爽!
根据公司计划,2022年4月起他们将起用原型机进行测试,2024年春季计划将该系统商业化并引入销售线。
见识一下高达工厂的魅力吧
说到高达,就不得不提到日本横滨精心打造的高达工厂。
2021年底,位于日本横滨山下码头的高达工厂正式开放,驻扎在这的元祖高达RX-78F00身高18米,采用1:1的原比例制成。官方展示以每半小时让高达从机库“出动”,观众也能够切身感受到能“活的”机动战士高达的魅力。



除了模拟巨型高达机器人外,该团队还针对将要建立的该机器人的1/30比例模型,以及为它建造的对接和维护设施进行了仿真。
看来,日本的高达文化不仅在文化上辐射到了本土和世界各国,还在科技领域颇有影响。
我是……我们是高达!

相关报道:





