是时候放弃TensorFlow集群,拥抱Horovod了

本文作者在实践中发现,TensorFlow 集群存在诸多缺点,如概念太多、学习曲线陡峭、修改的代码量大、性能损失较大等,而 Horovod 则让深度学习变得更加美好,随着规模增大,Horovod 性能基本是线性增加的,损失远小于 TensorFlow。
更多优质内容请关注微信公众号“AI 前线”(ID:ai-front)
当数据较多或者模型较大时,为提高机器学习模型训练效率,一般采用多 GPU 的分布式训练。
按照并行方式,分布式训练一般分为数据并行和模型并行两种:
模型并行:分布式系统中的不同 GPU 负责网络模型的不同部分。例如,神经网络模型的不同网络层被分配到不同的 GPU,或者同一层内部的不同参数被分配到不同 GPU;
数据并行:不同的 GPU 有同一个模型的多个副本,每个 GPU 分配到不同的数据,然后将所有 GPU 的计算结果按照某种方式合并。
注意,上述中的不用 GPU 可以是同一台机上的多个 GPU,也可以是不用机上的 GPU。
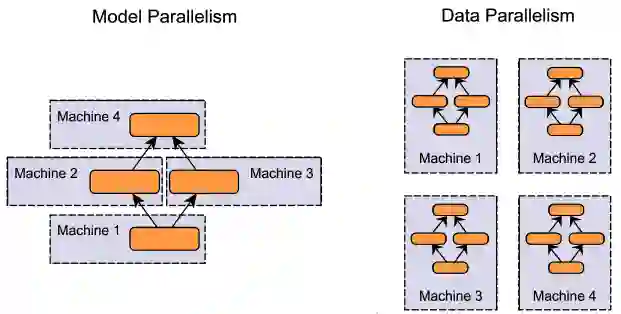
注:图中的 Machine 其实就是 GPU,当然也可以包含 CPU,但深度学习很少采用 CPU 训练
当然也有数据并行和模型并行的混合模式。
因为模型并行各个部分存在一定的依赖,规模伸缩性差(意思是不能随意增加 GPU 的数量),在实际训练中用的不多。而数据并行,则各部分独立,规模伸缩性好,实际训练中更为常用,提速效果也更好。
数据并行会涉及到各个 GPU 之间同步模型参数,一般分为同步更新和异步更新。同步更新要等到所有 GPU 的梯度计算完成,再统一计算新权值,然后所有 GPU 同步新值后,才进行下一轮计算。异步更新,每个 GPU 梯度计算完后,无需等待其他 GPU 的梯度计算(有时可以设置需要等待的梯度个数),可立即更新整体权值,然后同步此权值,即可进行下一轮计算。同步更新有等待,异步更新基本没有等待,但异步更新涉及到梯度过时等更复杂问题。
在实际应用中,单机多卡的同步式数据并行是最常用的,在论文中最常见的训练方式是单机八卡。数据再多时,一般就需要多机多卡了。
无论是单机多卡,还是多机多卡,均是分布式训练,在 Horovod 出现之前,使用 TensorFlow,一般只有官方推荐的集群训练方式。
可是 TensorFlow 的集群训练,用起来并不轻松。
TensorFlow 的集群采用的是 Parameter Server 架构,因此引入了比较多复杂概念,罗列如下:
server
client
master
cluster
parameter server
worker
job
task
replica_device_setter
master service
worker service
clone复制代码涉及到的函数:
tf.train.Server
tf.train.Supervisor
tf.train.SessionManager
tf.train.ClusterSpec
tf.train.replica_device_setter
tf.train.MonitoredTrainingSession
tf.train.MonitoredSession
tf.train.SingularMonitoredSession
tf.train.Scaffold
tf.train.SessionCreator
tf.train.ChiefSessionCreator
tf.train.WorkerSessionCreator复制代码我反复研究过多次,还是没有彻底弄清楚 server、client、master、master service、worker service、clone、session 之间的关系。
大致是,在 client 中创建 server 实例,session 与 server 一一对应,server 内含 master service 和 worker service 两个服务,master service 负责与外界通讯,比如 sess.run 一般都是告诉 server 的 master service 要开始工作了,server 的 master service 通知同一个 server 的 worker service 去干活,worker service 调动 GPU 运算,完成后,返回结果给 master service,做权值更新,如果是多机多卡的分布式,Parameter Server 与 master service 之间做梯度传递和权值同步。(参考 https://stackoverflow.com/questions/38732502/tensorflow-master-and-worker-service)
如果想把单机单卡的模型,移植到多机多卡,涉及的代码量是以天记的,慢的话甚至需要一周。
TensorFlow 集群是采用 Parameter Server 架构的,要想跑多机多卡的集群,每个机子都要启动一个 client,即跑一个脚本,来启动训练,100 个机子,人就要崩溃了。
TensorFlow 集群要将服务器分为 PS 和 Worker 两种 job 类型,PS 设置多少性能最近并没有确定的计算公式。
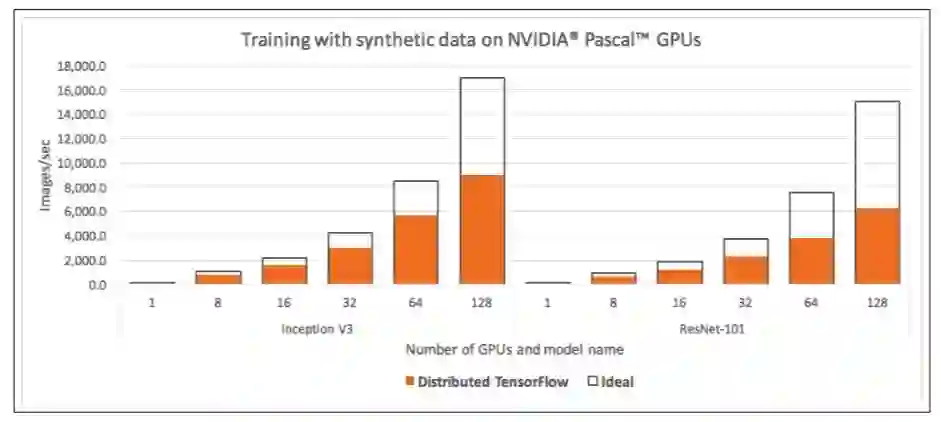
TensorFlow 的集群性能并不好,当超过一定规模时,性能甚至会掉到理想性能的一半以下。
由于 TensorFlow 集群太不友好,业内也一直在尝试新的集群方案。
2017 年 Facebook 发布了《Accurate, large minibatch SGD: Training ImageNet in 1 hour 》验证了大数据并行的高效性,同年百度发表了《Bringing HPC techniques to deep learning 》,验证了全新的梯度同步和权值更新算法的可行性。受这两篇论文的启发,Uber 开发了 Horovod 集群方案。
约定如下:
网络带宽记为:B(单位 Mb/s),模型总参数数据量记为:D(单位 Mb),总服务器数量记为:n,参数服务器数量记为:n_p(其中有 n= n_p+ n_w),worker 服务器数量记为:n_w(其中有 n= n_p+ n_w),单服务器计算一次耗时记为:T_0。
TensorFlow 的集群架构是 Parameter Server 架构,数据的传导模型如下图。
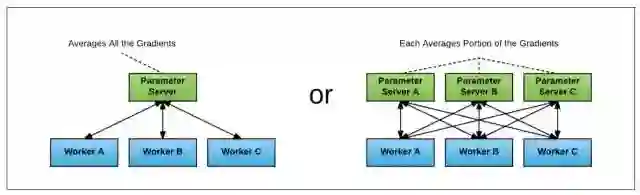
则可以计算出,Parameter Server 架构的集群方案,总耗时:
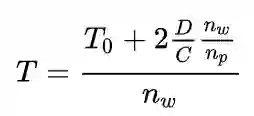
可以看出 T 与总节点数 n 基本成线性关系,但不同的参数服务器和 woker 服务器分配方案,总性能也将不同。
假设,e 表示 worker 服务器占比,即 e=n_w/n,则可以计算出最优的 e 值为:
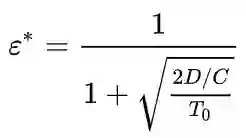
可以看出,最优 worker 服务器占比与模型大小、网络带宽、单机运行时长都有关系,并不是一个一眼能最优值的超参数。
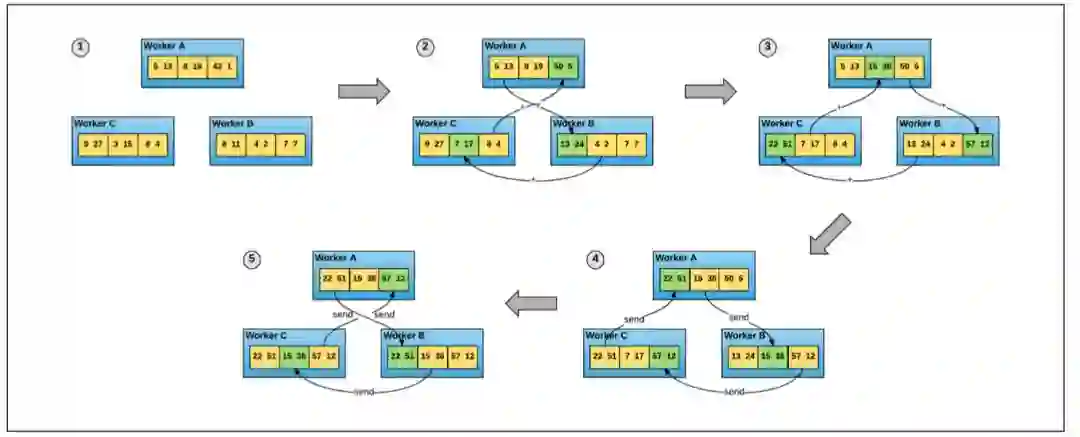
百度 2017 年发表的《Bringing HPC techniques to deep learning 》中,采用了全新的梯度同步和权值同步算法,叫做 ring-allreduce。此种算法各个节点之间只与相邻的两个节点通信,并不需要参数服务器。因此,所有节点都参与计算也参与存储。
一次权重更新,主要包含两个过程:
1)累计梯度
将所有梯度分为 n 个片段,每次只与相邻节点传递 1 个片段的梯度,n-1 次后,每一片段的梯度都完成了所有节点这一片段梯度的累计,但不用片段的累计值分布在不同节点上。如下图的第 2、第 3 步;
2)将累计后的梯度分发到所有节点
将第一步累计的梯度再次通过 n-1 次的相互交换后,所有节点的梯度完成同步。如下图的第 4、第 5 步。再平均后,更新权重,就完成了所有节点权重的更新。
可以计算出 ring-allreduce 算法的总耗时为:
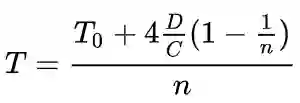
可以看出,总耗时基本与总节点数 n 成线性关系(n 较大时,1/n 基本为 0)。
Horovod 的梯度同步和权值同步就采用了 ring-allreduce 算法。
Horovod 的数据传递是基于 MPI,因此其涉及的概念也是 MPI 中的概念。以 4 个服务器,每个服务器 4 个 GPU 为例,
size 进程数量,也即所有 GPU 数量,为 16
rank 进程的唯一 ID,0-15
local rank,每一个 server 中的进程的本地唯一 ID,0-3
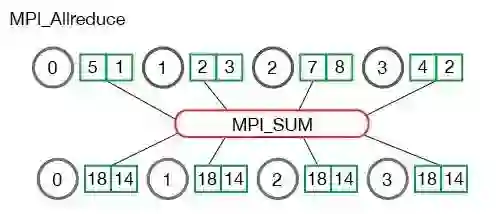
allreduce 累加所有数据,并同步到所有节点的操作,如下图
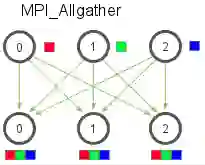
allgather 收集所有数据,并同步到所有节点的操作,完成后每个节点都包含所有节点的数据,并且这些数据单独存在,如下图。
broadcast 将数据(需要由根节点确认)从一个节点传播到其他所有节点的操作

大概就这么多概念,简单清晰。
将一个只支持单机单卡的训练脚本修改为支持多机多卡的训练脚本,以 TensorFlow 为例,只需要做如下改动:
import tensorflow as tf
import horovod.tensorflow as hvd
# Initialize Horovod
hvd.init()
# Pin GPU to be used to process local rank (one GPU per process)
config = tf.ConfigProto()
config.gpu_options.visible_device_list = str(hvd.local_rank())
# Build model...
loss = ...
opt = tf.train.AdagradOptimizer(0.01 * hvd.size())
# Add Horovod Distributed Optimizer
opt = hvd.DistributedOptimizer(opt)
# Add hook to broadcast variables from rank 0 to all other processes during
# initialization.
hooks = [hvd.BroadcastGlobalVariablesHook(0)]
# Make training operation
train_op = opt.minimize(loss)
# Save checkpoints only on worker 0 to prevent other workers from corrupting them.
checkpoint_dir = '/tmp/train_logs' if hvd.rank() == 0 else None
# The MonitoredTrainingSession takes care of session initialization,
# restoring from a checkpoint, saving to a checkpoint, and closing when done
# or an error occurs.
with tf.train.MonitoredTrainingSession(checkpoint_dir=checkpoint_dir,
config=config,
hooks=hooks) as mon_sess:
while not mon_sess.should_stop():
# Perform synchronous training.
mon_sess.run(train_op)可以看出,改动不大,只需添加 10 行左右的代码,主要分为 6 步:
hvd.init()
config = tf.ConfigProto()
config.gpu_options.visible_device_list = str(hvd.local_rank())
opt = tf.train.AdagradOptimizer(0.01 * hvd.size())
因为 BatchSize 会根据 GPU 数量放大,所以学习率也应该放大。
opt = hvd.DistributedOptimizer(opt)
分布式训练涉及到梯度同步,每一个 GPU 的梯度计算仍然由原有的 optimizer 计算,只是梯度同步由 hvd.DistributedOptimizer 负责。
hooks = [hvd.BroadcastGlobalVariablesHook(0)]
主要为了确保所有进程变量初始值相同。
checkpoint_dir = '/tmp/train_logs' if hvd.rank() == 0 else None
防止 checkpoint 保存错乱。
Horovod 只是需要改动必要改动的,不涉及 Parameter Server 架构的 device 设置等繁琐的操作。
在单机 4 卡的机上起训练,只需执行以下命令:
horovodrun -np 4 -H localhost:4 python train.py
在 4 机,每机 4 卡的机子上起训练,只需在一个机子上执行以下命令即可:
horovodrun -np 16 -H server1:4,server2:4,server3:4,server4:4 python train.py
注意无论是单机多卡,还是多机多卡,都只需在一个机子上执行一次命令即可,其他机 Horovod 会用 MPI 启动进程和传递数据。
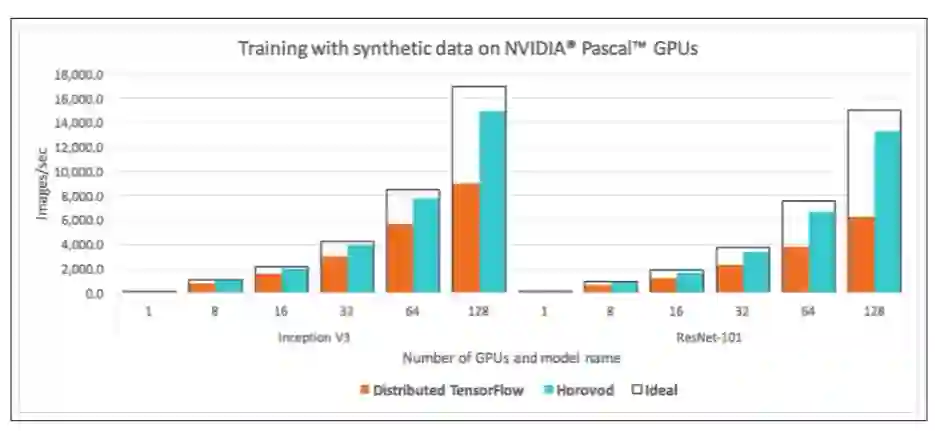
Horovod 随着规模增大,性能损失远小于 TensorFlow,基本是线性增加的。
用过 TensorFlow 集群的人,会深刻体会到 Horovod 有多好用,感谢百度、Facebook 和 Uber 让深度学习更美好。
不过,也要注意到,Horovod 的分布式貌似只支持同步更新式的数据并行,模型并行和异步更新式的数据并行,我没有尝试过,根据 ring-allreduce 算法可知,应该是不支持的。
在 AI 前线 后台回复关键词:Uber,获取关于 Horovod 的更多干货文章。
注:请在公众号对话框回复关键词,留言区回复收不到链接哦~
今日荐文
点击下方图片即可阅读

AutoML:机器学习的下一波浪潮
希冀快速学习成长,但基础易不夯实?企业加快转型,技术能力又跟不上?寻求外部培训奈何价更高?想做团队的领跑者,你需要迈过这些“槛”,这里有12大技术领域的干货内容,解决你 / 团队的学习难题。

你也「在看」吗?👇




