仿生蚂蚁机器人面世,分工协力搬重物,跳高跨栏都能行丨Nature
鱼羊 郭一璞 发自 凹非寺
量子位 报道 | 公众号 QbitAI
Tribot,史上最小的拥有多种运动能力的机器人,登上了最新一期的Nature。
它的创造灵感来源于蚂蚁,堪称“机械蚁”,就像一个全能运动员一样,能跑,能跨栏,能像体操运动员一样稳稳地翻跟头,还能跳高,弹跳高度足以达到自己的身高的2.5倍。
而且,它只有10g重,巴掌大小,自带所有元器件,无需外接电源。
甚至还实现了社会化,能像蚂蚁一样分工协作,一起完成单个个体做不到的事情。
这究竟是什么神奇机器人?
超级运动员

Tribot具有Y型结构,可以执行行走和弹跳两类动作。
行走,是靠两个腿来“蠕动”一般的往前走:

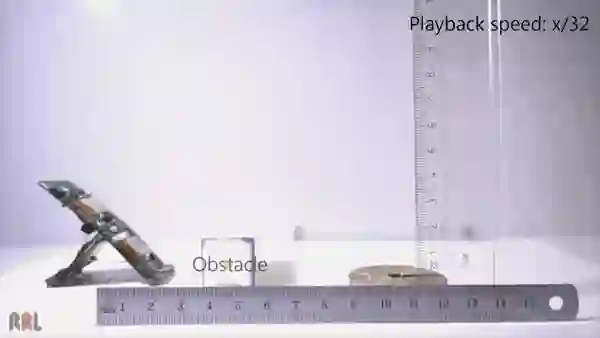
而弹跳则能爆发出更高的能量,演化出更骚的操作,比如它能“跨栏”:
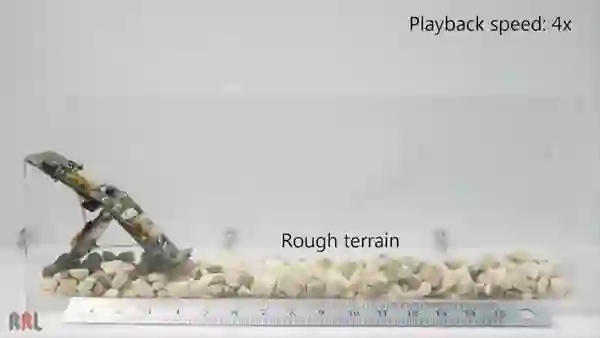
碰到崎岖路面,可以翻着跟头往前走:
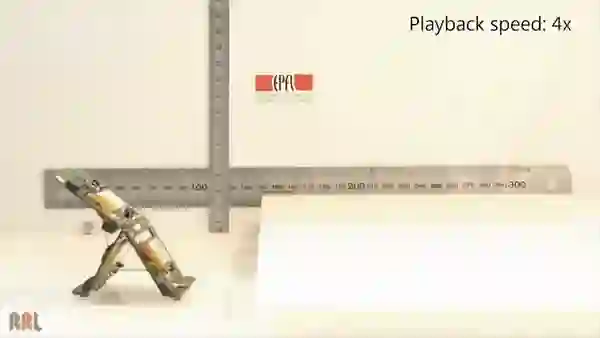
遇到台阶,那就蹦上去:
甚至还有跳高技能,最高能达到自己身高的2.5倍:

如此高超的弹跳力,灵感来源于锯针蚁。
锯针蚁是蚁科下面的一个属,包含73个不同的物种,它们的共同特点是长了一对巨大的下颌骨。

这对下颌骨可以打开,可以合上,能当武器用捕猎用,也能逃生。
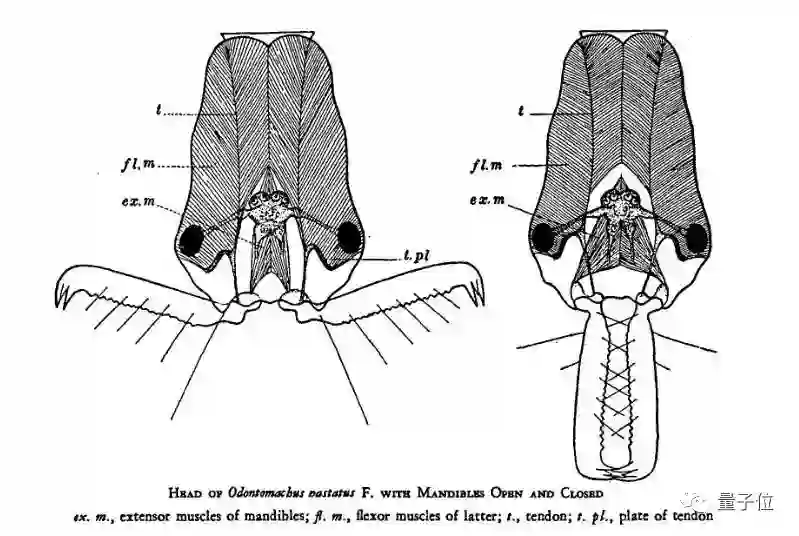
当遇到危险时,锯针蚁迅速移动这对下颌骨,就能把自己弹跳出去,远离事发现场。
Tribot就主要模仿了锯针蚁的下颌骨,通过三块折叠在一起的复合材料,制造了三角形的结构,类似锯针蚁的身体和左右两个下颌骨。
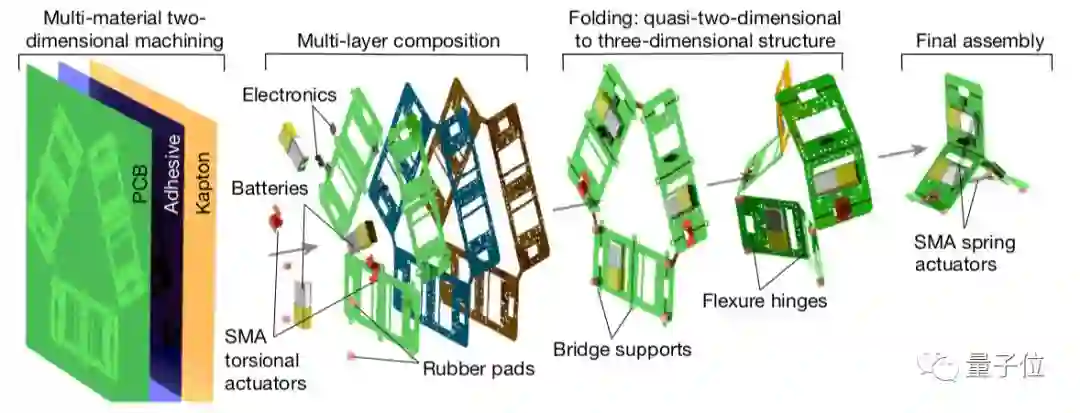
扁平的材料由PCB板和聚合物构成,再经过几个折叠,二维结构就变成了三维结构,这样的设计保证了机器人的可扩展性。

需要的元器件可以全都焊接在PCB板上,包括微控制器,距离和通信传感器以及可充电电池等,这样可以实现自带电池,无需外接设备。
对于当前版本的Tribot来说,决定其尺寸的关键因素是电池的容量。虽然整个Tribot只有10g重,巴掌大小,但当前使用的电池(3.7V,40mAh)几乎占PCB表面积的一半,占机器人重量的40%。
PCB板后面则粘了Kapton聚酰亚胺层,这两个层通过粘合剂膜粘合在一起,并要在160℃和90N压力下热压2分钟,形成了柔性铰链,为机械蚁提供柔韧性。
机器人的三条腿由Y型铰链连接,它的“肌肉”则由线性弹簧式形状记忆合金(SMA)执行器构成,这种材料在受热时可以变形,Y型铰链可以通过加热激活“肌肉”来实现腿的开闭,而前面提到的Kapton刚好也是一种隔热材料。
Y型铰链同时也是机器人的“下颌骨”,像锯针蚁那样通过扣压下颚来实现弹跳也要仰仗它。当Y型铰链在三个侧面中的任何一侧被一对伸展的SMA弹簧执行器打开至略高于180°的角度时,它会以一个与压力成比例的变速度按扣进施加压力的一侧。
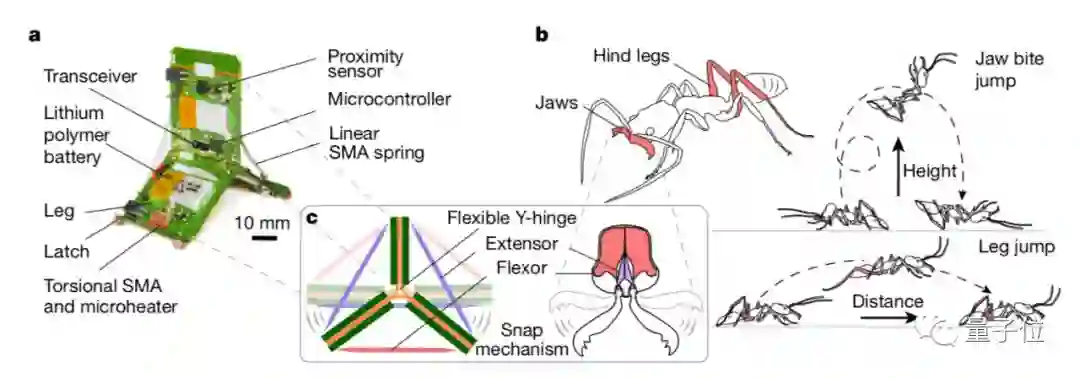
如果这个过程发生在铰链底部,Tribot就会垂直上跳。如果这个过程发生在铰链两侧,机器人则会做出类似立定跳远的动作,这也是它跨越障碍的主要方式。当然啦,结合两种方式,以翻筋斗的动作来跨越复杂地形对于Tribot也并非难事。
“机械蚁”群能协同
而Tribot的团队协作能力,也堪比它的原型蚂蚁。它们不仅单打独立能力强,还能组队合作。
比如玩推箱子游戏。这两只机械蚁,合力推动了一块它们独自无法撼动的方块:
但这并不单单是他们二蚁的工作,如此统一的步伐,协同的步调,依靠的是旁边的指挥官机械蚁,指挥官设定方块的目的地,协调两名“工蚁”的动作。
是不是像人类一起搬运重物一样,需要有人负责出力,有人负责在旁边指挥“一二、抬起来,走,一二、一二……往左一点,往右一点,再往前一点,好,放下来……”
但这群机械蚁,还有更高端的技能:通讯。
实验表明,这样一个简单的任务仍需要五个Tribot才能完美完成:两只“工蚁”将物体推向监工,监工用距离传感器测量方块与自己的相对距离,然后通知这个任务的指挥官。指挥官会根据这个反馈来命令“工蚁”继续前进或停止推动。
像人的视觉存在死角一样,在某些角度下指挥官和监工之间的通信信号会被阻断,为了任务的正常进行,还需要一个信使加入进来,它会避开死角,为指挥官和监工传递消息。

串联运行也没有问题。
在另一个实验中,两个机器人要一前一后跨越障碍,它们都以固定步长爬行。
走在前面的机器人是实验中的指挥官,指挥官在爬行的过程中用距离传感器连续扫描障碍物,而它后面的工蚁仅接收来自领导的消息,不消耗能量重新进行环境扫描。

在实验进行过程中,指挥官发现了障碍,当它停留在障碍前时,它把情况告知了工蚁。收到消息后,工蚁仅测量了一下它与指挥官之间的距离,通过将该距离除以步长来计算应该再爬行多少步。
传递完消息,指挥官顺利跳过了障碍,工蚁紧随其后,完美完成任务。
Tribot们证明了它们就像蚁群一样,可以扮演不同的角色协同作战。而且它们还能做到真正的蚂蚁做不到的事情——它们可不会局限于一个角色,在新的任务或陌生的环境当中,它们能够随时承担新的角色,互相教学和学习。
前途无量
这款机械蚁的结构简单,没有复杂的外壳,因此能够方便地实现量产。
虽然当前版本的Tribot可操作性和计算能力有限,但它已经表现出了对现实问题的适应能力。
在紧急搜索和环境监测领域,Tribot大有可为。它们可以被大量制造并集体部署,通过多智能体通讯快速定位目标,更重要的是,它们能够承受个体伤亡的代价。
不仅如此,Tribot也有潜力发展成一个有趣的平台,成为机器人界的树莓派,可扩展,便宜,易上手,人人都可以用它来探索机器人新的可能性。
EPFL出品
这个机械蚁的作者们,来自洛桑联邦理工学院可重构机器人实验室和大阪大学自适应机器人实验室两个机构。

一作小哥Zhenishbek Zhakypov,出生于吉尔吉希斯坦,目前在瑞士洛桑联邦理工学院读博,此前硕士毕业于土耳其的萨班克大学(Sabanci University)。他专门研究各种可重构机器人,也就是会变形的机器人。
传送门
论文:
Designing minimal and scalable insect-inspired multi-locomotion millirobots
Zhenishbek Zhakypov, Kazuaki Mori, Koh Hosoda, Jamie Paik
https://www.nature.com/articles/s41586-019-1388-8
— 完 —
AI社群 | 与优秀的人交流
AI内参 | 关注行业发展


量子位 QbitAI · 头条号签约作者
վ'ᴗ' ի 追踪AI技术和产品新动态
喜欢就点「在看」吧 !




