学术前沿| 陈锐志:基于智能手机的室内定位技术的发展现状和挑战
《测绘学报》
构建与学术的桥梁 拉近与权威的距离
基于智能手机的室内定位技术的发展现状和挑战
,
1. 武汉大学测绘遥感信息工程国家重点实验室, 湖北 武汉 430079;
2. 地球空间信息技术协同创新中心, 湖北 武汉 430079
收稿日期:2017-07-04;修回日期:2017-09-07
基金项目:国家重点研发计划(2016YFB0502200;2016YFB0502201);国家自然科学基金(91638203)
第一作者简介:陈锐志(1963—), 男, 博士, 教授, 博士生导师, 研究方向为室内外无缝定位、移动信息空间计算、卫星导航。E-mail:chen@whu.edu.cn
通信作者:陈亮, E-mail:l.chen@whu.edu.cn
摘要:室内定位是未来人工智能的核心技术之一,对即将到来的人工智能时代起着举足轻重的作用。开发有效的室内定位新技术是工业界和学术界的研究热点,如谷歌研发的室内视觉定位服务技术、苹果致力推动的基于低功耗蓝牙的iBeacon室内定位技术以及百度携手芬兰IndoorAtlas公司推出的基于磁场匹配的室内定位方案等。然而,受室内复杂环境以及空间布局、拓扑易变等影响,实现准确、可靠、实时的室内定位,满足各类定位需求仍有很大的挑战性。目前,随着智能手机的普及和微机电系统技术的发展,智能手机内置多种传感器和支持丰富的射频信号,可提供不同的定位源。本文从智能手机的内置传感器和射频信号两个方面,综述了现有基于智能手机的室内定位技术,指出各种定位技术的优缺点和应用场景,分析室内定位的发展现状和存在难点,对室内定位技术未来的发展方向进行了展望。
关键词:智能手机 室内定位 位置服务 射频信号 微机电系统
Indoor Positioning with Smartphones:The State-of-the-art and the Challenges
,
Abstract: Indoor positioning is one of the core technologies of artificial intelligence (AI) in the future and will play a pivotal role in the upcoming era of AI. Currently, indoor positioning is one of the hot research topics in academic and industrial society. Google, as one of the leading information technology (IT) companies, has listed visual positioning service (VPS) as one of the core technologies. Apple has endeavored to prompt iBeacon, the low energy Bluetooth technology for indoor positioning. In cooperation with a Finnish company, IndoorAltas, Baidu launched an indoor positioning program with a magnetic matching approach. All these initiatives and new technologies have shown the significance and necessaries of indoor positioning. However, affected by the complexity of the indoor spaces, it is still challenging to achieve accurate, effective, full coverage and real-time positioning solution indoors. With the popularity of smart phones and the rapid development of MEMS sensors in recent years, many methods have been proposed to use the smartphone built-in sensors and RF radios for indoor positioning. In this paper, we focus on indoor positioning technologies for smartphones and classify the different technologies into two categories, namely the radio frequency (RF) technologies and the sensors technologies. The state-of-the-art of the technologies has been reviewed. The pros and cons of the technologies have been commented in the context of different application scenarios. Moreover, the challenges of indoor positioning have also been pointed out and the directions of the future development of this area have been discussed.
Key words: smartphone indoor positioning location-based services radio frequency (RF) signals microelectromechanical systems (MEMS)
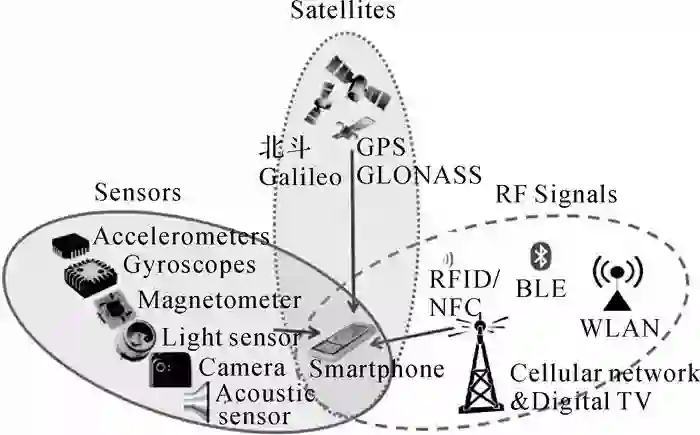
定位是位置服务、万物互联、人工智能和未来超智能(机器人+人类)应用的核心技术之一。随着智能手机的普及和技术发展,定位信息已经成为智能手机必不可少的基本信息之一。如图 1所示,智能手机内置多种传感器和支持丰富的射频信号,可提供不同的定位源。智能手机的定位源主要包括3大类:① 导航卫星接收机:包括我国的北斗,美国的GPS,欧洲的Galileo和俄罗斯的GLONASS等;② 内置传感器:包括加速度计、陀螺仪、磁力计、气压计、光线传感器、麦克风、扬声器和相机;③ 射频信号:包括Wi-Fi、蓝牙、蜂窝无线通信信号等。除了卫星导航接收机外,所有传感器和射频信号都不是为定位而设置的。尽管如此,这些传感器和射频信号还是为我们提供了很多的室内定位源。
| 图 1 智能手机的定位源Fig. 1 Sensors imbedded in smart phones for the purpose of positioning |
图选项 |
除了丰富的室内定位源外,室内定位方法也有很多种。按照定位场景可以分为室外定位和室内定位。室外定位以成熟的开机即得的卫星定位技术为主,利用各类增强技术,在室外开阔地带定位精度可以达到亚米级[2]。室内定位技术目前还不够成熟,但是变得越来越重要。根据美国环境保护局的报告统计,人们有近70%~90%的时间是在室内度过[1]。室内定位技术是应急安全、智能仓储、人群监控、精准营销、移动健康、虚拟现实游戏及人类社交等需求的基础。因此,实现准确、可靠、实时的室内定位,满足大众需求,具有非常重要的科学意义和社会应用价值。但受限于空间布局、拓扑和复杂信号环境等方面的约束,实现准确、可靠、实时的室内定位,满足现有各类定位需求仍有很大的挑战性。其主要受制原因在于:
(1) 主流的全球卫星导航系统(global navigation satellite systems,GNSS)目前虽然已经被广域大规模商业应用,在室外开阔环境下定位精度已可以解决大部分定位需求,但该类信号无法覆盖室内,难以形成定位。
(2) 室内环境复杂,无线电波通常会受到障碍物的阻挡,发生反射、折射或散射,改变传播路径到达接收机,形成非视距(non line-of-sight,NLOS)传播。NLOS传播会使定位结果产生较大的偏差,严重影响定位精度。
(3) 室内空间布局、拓扑易受人为的影响,导致声、光、电等环境容易发生变化,对于以特征匹配为基本原理的定位方法,定位结果将受到较大影响。
室内定位目前已成为工业界竞相角力的焦点。这不仅是初创公司间的竞争, 同时还包括像苹果、谷歌、高通、Intel、Cisco、百度、腾讯、阿里巴巴这样的商业巨头。“十二五”期间,我国已启动了“羲和”计划,旨在构建能提供室内3 m、室外1 m的精密定位服务系统;“十三五”期间,我国在对地观测领域启动了多项室内定位方向的国家重点研发计划项目。此外,国内外针对室内定位技术的研究也取得了快速的发展和突破。本文将概述现有基于智能手机的室内定位技术,并对未来室内定位发展趋势作分析和展望。
1 室内定位技术发展现状
各类定位信号源主要包括:射频信号、内置传感器和GNSS信号。国内外学者已有综述文献予以总结[3-5]。本节将依据现有智能手机所集成的各类传感器,着重综述适合现有智能手机定位的室内定位技术及现状。
1.1 射频信号定位技术
现有主流智能手机支持Wi-Fi、蓝牙和蜂窝无线通信信号,以数据传输为主要目的。随着非接触支付的兴起,越来越多的智能手机也逐步支持近场通信技术(near field communication,NFC)。由于所述射频信号的载波频率、信号场强以及信号有效传输距离不同,其室内定位的方法也有所区别。
Wi-Fi定位技术:Wi-Fi是基于IEEE 802.11系列通信协议[6]的无线局域网技术。利用Wi-Fi信号进行室内定位,主要采用测距交会与指纹匹配两种方式。其中,测距交会方式可以通过测量接收机到多个Wi-Fi接入点(access point,AP)的信号强度(received signal strength index,RSSI),根据距离与RSSI的信道衰减模型得到接收机到各AP的距离,再通过三角定位方法得到位置估值[7]。由于室内环境复杂、易变和非视距现象严重,很难准确估计信道衰减模型,精度较差的信道衰减模型会影响最终定位精度。此外,信号发射器与接收机的距离还可以通过测量飞时(time of flight,TOF)方法得到[8]。试验表明,室内多径和无线局域网内的时变中断服务对TOF测量精度有较大影响。通过合适的滤波器设计以及对测量结果进行平滑,可以提高测距精度。指纹匹配定位方式[9]包括两步:训练过程(training phase)和定位过程(positioning phase)。训练过程是预先将定位环境划分若干网格,并在网格点上采集信号指纹(如Wi-Fi信号强度),存入指纹库。定位过程是将接收到测量值与预先构建的网格指纹进行对比,通过匹配及相似性分析得到室内位置估计。该方式优点在于不需要预先知道Wi-Fi接入点的坐标和信号的信道衰减模型,其缺点在于其信号容易受环境干扰,在空旷空间误配率高,并且构建及更新指纹数据库需要耗费大量的时间和人力。传统的指纹匹配方式以RSSI为测量值建立指纹数据库,目前利用RSSI指纹匹配的Wi-Fi定位系统包括RADAR[9]、Ekahau[10]、Horus[11]等,定位精度在2~5 m。RSSI指纹库仅提供了环境和信号接收的粗信息,无法提供信号物理层更多的多径信息。受益于Wi-Fi接收设备性能提高,目前有些商用Wi-Fi接收模块已可以提供信道状态信息(channel state information,CSI)。研究表明,利用CSI信息建立指纹数据库进行定位,可以有效地提高定位精度[12-14]。
限制Wi-Fi指纹匹配定位方法的商用和大范围覆盖的主要因素是高效的指纹库建立和自动更新方法。现有关于降低指纹库维护成本的方法包括通过采用插值[15]、众包(crowd sourcing)[16]和基于激光雷达的室内定位制图(simultaneous localization and mapping,SLAM)[17]等方式。影响Wi-Fi定位精度进一步提高的主要因素包括:AP间信道干扰[53],手机Wi-Fi的硬件差异性,以及人体对Wi-Fi信号的遮挡[54]。此外,Wi-Fi的定位中的信息安全和个人隐私问题目前也日趋受到关注[18]。
文献[19-20]利用AP的多天线传输模式,同时估计AOA和距离,分别获得分米和厘米级定位结果。但该定位方法是基于AP基站的网络定位,对单发射天线的智能手机并不适用。
蓝牙定位技术:蓝牙是基于无线个域网WPAN(wireless personal area network)[21]IEEE 802.15.1协议的短称射频信号,低功耗和支持短距离通信。其工作频率在2.4 GHz。蓝牙信号传输距离通常为10 m左右,新的BLE 4.0协议支持最大传输距离可达100 m。Apple公司推出的iBeacon系统[22],基于RSSI的测距方式,定位精度可达2~3 m。蓝牙定位也可以采用指纹匹配方式,在典型办公室环境下定位精度为约为4 m[23-25]。而芬兰Quuppa公司[26]推出的蓝牙天线阵列系统,定位精度可达几个厘米。但每个天线的覆盖范围小,安装成本高。蓝牙设备功耗低、体积小,且蓝牙技术已广泛集成在包括智能手机在内的移动设备中,易于推广使用。
基于NFC定位技术:NFC又称近距离无线通信,是让两个电子设备(其中一个通常是智能手机等移动设备)在相距几厘米之内进行通信。NFC主要是用于智能手机的非接触支付系统。NFC是通过靠近原则(proximity)进行定位的。当NFC感应标签感知到智能手机时,感知标签的位置就是智能手机的位置。NFC定位技术简单快速[27],但无法准确估计行人在两个感应标签之间的位置及运动状态。可以在室内关键位置布置少量NFC感应标签,通过与运动传感器融合实现广域覆盖。
蜂窝定位技术:利用2G/3G/4G移动通信信号,在基站通过设计定位协议或者增加新的定位模块进行定位,又称基于RAN(radio access network)[10]的定位方法。蜂窝定位技术的最大优点是很容易实现室内外无缝定位。其缺点是受制于系统设计、信号调制方式、国际标准等因素影响,定位精度较低,一般在几十米到几百米[28-29]。爱立信公司利用LTE信号采用OTDOA(observed time difference of arrival)方式,定位精度可以达到50 m(97%误差)[30],定位结果还是满足不了大多数室内定位应用的需求。引入宽带通信信号以及多天线MIMO技术的5G通信系统,有望进一步提高蜂窝网络定位精度。5G白皮书已明确要求室内外定位精度优于1 m[31-32]。现有的5G定位研究主要包括基于高密度5G网络下的高精度定位和时间同步方法[33],基于定位的波束成行法[34]等。
1.2 基于传感器的定位技术
智能手机的内置传感器包括:加速度计、陀螺仪、磁力计、气压计、光线强度传感器、相机、麦克风、扬声器等。这些传感器不是为定位而设置的,但是,它们量测的物理量可以以不同的形式用于定位。这些定位方法包括:行人航迹推算、地磁匹配、视觉定位、音频定位和光源编码定位。
行人航迹推算:随着微机电系统(micro-electro mechanical system,MEMS)技术的成熟,集成到智能手机平台上的低成本惯性测量单元IMU(inertial measurement unit)越来越多,主要常见的是加速度计、陀螺仪和磁力计。由于这些内置运动传感器的成本很低,其稳定性和测量精度也相对较低,不足以用于惯性导航。目前,这些传感器都用于行人航迹推算(pedestrian dead reckon,PDR),主要是利用加速度计来探测步数、测量步行速度,再通过磁力计和陀螺仪确定航向,融合步速和航向推算行人的相对位移量[42, 61]。整个算法不包含任何积分过程,有效减弱漂移误差的影响。难点在于航向估计。由于室内环境磁干扰相当严重,很难准确估计航向。PDR是相对定位,航向误差会导致整条航迹的旋转。所以PDR需要跟Wi-Fi或地磁匹配等绝对定位算法融合才能有效抑制系统误差的传播[60]。
磁场定位技术:磁场定位技术是以磁场为指纹信号,通过匹配室内环境显著的磁场特征,最终实现定位。跟前面所述的Wi-Fi指纹匹配一样,任何匹配定位技术都有训练和定位两个过程。地磁匹配也不例外,同样需要先建立地磁指纹库,最后通过匹配地磁特征实现定位。由于磁场特征的空间相关分布,磁场匹配除单点匹配外,还可以通过轮廓匹配(如dynamic time warping方法),以及多点的轮廓线匹配,实现更稳健的匹配结果。室内磁场信号易受人为改变,在实际应用中较难构建精确的磁场特征指纹库。芬兰奥卢大学提出一种基于地磁的导航定位系统IndoorAtlas[43],定位精度可达到0.1~2 m。该方法融合磁场和内置传感器。目前,智能手机大多集成磁力计,磁场也是开机即得的定位信号,所以磁常场定位技术适用于智能手机定位。
视觉定位技术:视觉定位有很多种,由于目前智能手机上通常使用单目摄像头,所以基于智能手机的视觉定位是以单目视觉定位为主。最简单的定位方法是图像匹配。图像匹配首先需要建立图像库,图像库里每张照片对应的相机位置是已知的。定位时通过匹配拍摄照片和图像库里的照片,实现定位。相对复杂的定位方法是基于相机交会的定位方法。首先要对定位场采集大量的重叠照片,提取定位场的显著图像特征点,利用密度匹配和Structure from Motion的原理,确定定位场里显著图像特征点的物方坐标。定位时通过计算定位图像的特征点,与图像特征库里的图像特征进行匹配,利用匹配特征点的已知物方坐标进行交会,确定手机相机的坐标和拍摄时手机的姿态。此外,单目视觉定位还有视觉陀螺仪和视觉里程计技术[44-45]。视觉陀螺仪是利用单目摄像机通过获取每帧图像的灭点(vanishing point),利用相邻两帧图像的灭点变化,求取航向角变化率。视觉里程计则是通过匹配相邻时间序列特征点,来获取单位时间内行人的相对位移。文献[46]列举了将视觉陀螺仪和视觉里程计与其他惯性测量单元IMU进行融合定位的方法。视觉定位技术算法较为复杂,运算量大,功耗高,随着智能手机的性能进一步提高,该类方法有望在行人导航中进一步普及。谷歌的核心技术VPS(visual positioning service)是视觉定位技术。
红外线定位技术:红外线是波长介于微波与可见光之间的电磁波,波长在760 nm~1 mm之间,是比红光长的非可见光。经典的红外室内定位系统是AT&T Cambridge研究所设计开发的Active Badge系统[35],采用的是散射红外技术,即行人携带的红外发射装置每10 s传输一种经过调制、信号唯一的红外信号。接收端通过接收该红外信号对行人进行定位。红外线发射器小,重量轻、易于携带,系统便于安装和维护。但红外线定位需要收发机存在直射路径,因而抗干扰能力较差。近年来,随着智能手机对用户安全性的保护,智能手机生物识别的功能更趋严谨,这促进了智能手机中近红外线摄影机(700~900 nm近红外线LED+影像感测镜头)的集成与应用[36]。利用智能手机红外线LED进行室内定位也将引起越来越多的研究关注。
LED可见光定位技术:利用可见光进行定位可以包括两大类:一是通过对光源调制特定的光信号进行定位。比如,通过LED灯具发出人们肉眼感知不到的高频闪烁信号,通过光敏传感器接收该LED光信号,进而计算行人位置信息。Bytelight定位系统[37]即是基于该类原理的定位系统,定位精度可以达到米级。第二类是基于模式匹配方法,即利用环境光的时频特性,预先建立环境光指纹数据库。在实时定位阶段将所测光强度与环境光指纹数据库进行匹配,实现定位[38]。智能手机的内置摄像头可以感应光强度和高频光信息,因而上述光定位技术均可应用于智能手机的室内定位。
超声波定位技术:超声波定位技术采用信号往返时间测距。系统通过向待测物体方向发射超声波,计算接收到的回波与发射波之间的时间差来计算信号发射器与待测物体之间的距离。具有较高知名度的超声波定位系统是Active Bat系统[39]和Cricket系统[40],其中Active Bat系统定位误差在9 cm之内的概率高达95%。超声波定位系统结构简单,定位精度较高,但构建系统需要大量的硬件设施。此外该定位技术需要视距条件下测距,故受室内多路径影响明显。目前,智能手机的多个移动应用可以监听音频中内嵌的超声波信号,利用这些信号确定用户位置[41]。但目前智能手机尚没有超声波发射装置,可以采取主动的收发测距手段。
1.3 多源融合定位方法
上述定位方法虽各有优势,但也存在各自的局限,比如,基于射频信号的室内定位方式主要缺陷是信号容易受多径、定位环境以及人体等干扰而导致指纹匹配出错或者产生较大测距误差。而基于内置传感器的行人航迹推算虽不依赖基础设施,但随着时间推移存在误差积累。目前还没有开机即得的室内通用定位技术。表 1列举了目前智能手机上各类定位技术在定位精度、复杂性、健壮性、可扩展性、成本等方面的性能比对。
表 1 目前智能手机定位技术比较Tab. 1 Comparison of different positioning technologies of smart phone sensors
| 定位源 | 定位精度 | 健壮性 | 复杂度 | 可扩展性 | 成本 |
| Wi-Fi | 指纹匹配方式2~5 m, 测距方式受环境影响 | 易受环境、人体等干扰 | 指纹库的建立耗时耗人力 | 易 | 利用现有的设施, 无额外成本 |
| 蓝牙 | 指纹识别方式2~5 m, iBeacon, 天线阵列方式 < 1 m | 易受环境等干扰 | 指纹匹配的建立耗时耗人力 | 易,iBeacon作用距离短(小于5 m) | 天线阵列成本高 |
| NFC | 通过近场感知, 厘米级, 但作用距离短 | 好 | 低 | 易 | 需要布设大量的NFC标签 |
| 蜂窝技术 | 十几米到几十米 | 易受环境干扰 | 中 | 好 | 高 |
| 红外线 | 米级 | 要求直射径 | 中 | 低 | 中,需要布设额外的收发装置 |
| LED可见光 | 1~5 m | 中 | 中 | 好 | 低 |
| 超声波 | 厘米级 | 好 | 低 | 低 | 中高,需要额外布设接收装置 |
| 惯性导航 | 取决于自身器件特性, 有累积误差 | 好 | 中 | 好 | 低 |
| 地磁 | 2~5 m | 易受周围环境影响 | 高 | 好 | 低 |
| 计算机视觉 | 基于相机交会方法, 几厘米, 其他方法, 米级 | 中, 环境光线影响成像质量 | 很高 | 好 | 中 |
表选项
随着智能手机上计算和存储性能的提高,在手机平台上对多种定位技术进行融合,是当前室内定位的一个研究热点。现有的融合方法主要分成松耦合和紧耦合。其中松耦合常用的方法是先由各自不同的传感器得到定位结果,然后对各定位结果进行信息融合。该类融合方式易于实现,但存在的挑战是,由于室内定位各类传感器异质(非同源),各传感器输出定位结果进入信息融合中心的系数不易通过解析方法得出。紧耦合是根据各类传感器得到的不同类型的观测参量进行融合。目前比较常见的是基于贝叶斯滤波方法,如Kalman滤波[55]、UKF(unscented Kalman filter)滤波[60]、粒子滤波[56]。该类方法将传感器的原始观测值,如位置、速度、航向角、步长等,通过序贯估计获得行人的位置和航向估计。紧耦融合准确设定运动状态方程和测量方程,尤其是运动状态噪声方差和测量噪声方差将直接影响定位的估计性能。
已有的基于不同传感器融合定位方案包括:结合磁场强度、蜂窝信号和Wi-Fi构建的混合定位系统[47],Wi-Fi信息结合PDR[48, 50],蓝牙模块、加速度计和气压计进行融合室内三维定位[49],Wi-Fi指纹、PDR以及磁场匹配定位[39]。上述试验结果表明融合后的系统精度稳定性均优于独立的定位系统。另外,地图约束也是常用的室内定位辅助技术。基于地图辅助的Wi-Fi指纹匹配与PDR集成的室内定位系统,可以可靠地实现米级的定位精度[52]。文献[46]不借助任何室内固定设施和射频信号,根据自身携带的IMU、摄像头、超声波、气压计,采用粒子滤波融合各导航源,在室内环境下定位精度约为3 m。
2 室内定位面临难题
由于室内空间复杂的信道环境和空间拓扑关系,给室内定位带来很大的挑战。虽然室内定位源很多,包括声、光、电、场等多种异源异构定位源,但各种定位源都有自身的缺陷和对定位环境的依赖性,使得他们只适用于额定环境和应用时具有一定的局限性。例如Wi-Fi指纹匹配需要足够的信号覆盖;磁场匹配需要显著磁场特征(磁干扰);视觉定位需要明亮的环境下才能保证高质量成像等。目前还很难找到一种跟室外GNSS技术相似的开机即得的室内定位技术。
目前国际上最流行的室内定位技术是融合GNSS,Wi-Fi,蓝牙、内置传感器和磁场等定位源的任意组合,定位精度在2~5 m之间。在特定环境下,也能达到1 m左右的精度。低成本、高精度和广域覆盖的室内定位技术依然是实现高精度室内外无缝定位的最大障碍。其主要难题在于:
2.1 室内空间复杂的信道环境与空间拓扑关系
对视频信号来讲,信号发射器和接收机间通视是定位的基础。任何遮挡会导致信号强度的迅速衰减或直接阻挡信号的传播。GNSS信号无法穿越厚厚的建筑墙面是一个典型的例子。卫星导航信号从2万多千米的高空,穿越大气层后传到地面,已经很微弱,再加上墙壁或玻璃的遮挡,能进入室内的GNSS信号只能通过高灵敏度接收机接收,其定位精度在几十米或者更差。
由于室内空间复杂的拓扑关系,室内空间内部信号遮挡是室内定位常遇到的问题,大大限制了很多室外定位技术在室内普及的可能性,也把有效定位范围限制在很小的范围内,给实现室内定位广域覆盖带来极大的困难。此外,复杂的拓扑空间也导致复杂信号传播环境。大量的反射信号也直接影响到测量精度,从而导致较大的定位误差。复杂的空间拓扑关系从定位精度和可用性两个方面给室内定位带来诸多约束。
定位场景信号场的时空变化问题。除了复杂的空间拓扑关系外,室内几何环境和信号环境的时空变化也是维持定位系统的高可持续性的最大障碍(如Wi-Fi基站的增减,室内电器和家具的布设变化,货架货物变化,展览场馆的布设变化等)。如何感知和认知室内几何环境和信号环境的时空变化,提高对定位环境的自学习、自适应能力,实现定位指纹库(包括Wi-Fi指纹库,地磁指纹库等)、图像特征库、地标信息库自动更新,是室内定位领域还没解决的科学问题。
2.2 异源异构的定位源
如图 1所示,基于智能手机的室内定位源主要包括3大类:卫星定位,短距离射频信号和传感器。卫星定位包括GPS、北斗、Galileo和GLONASS;短距离射频信号包括Wi-Fi和蓝牙;传感器包括加速度计、磁力计、陀螺仪、气压计、光强度传感器、麦克风、扬声器和相机。个别智能手机还包括深度相机,除了卫星定位接收机以外,所有传感器和射频信号都不是为定位用途而设置的,手机商在选择这些传感器和射频信号时首要考虑的性能不是定位。卫星定位、短距离射频信号和传感器的信号机制和工作原理是完全不同的。他们测量的物理量和测量方法也不一样,测量精度也因源而异。为了得到最优的定位结果,通常需要融合这些异源异构的定位验。在融合这些异源异构的定位源时,面临以下问题:
(1) 信号测量值同步问题。由于不同定位源的测量过程是独立工作的,不同测量值的采样时间是不一样的。如果位置计算在同一个手机上,可以把所有定位源的观测值都统一到同一时间系统(如手机时间),通过内差等方法把异源观测量归算到同一观测历元上。如果位置计算在云端服务器上,所有参与定位的手机都必须统一到同一时间基准,比如说网络时。不同手机的异源观测值也必须归算到同一观测历元。前面所述方法只适用于用户在低速运动状态下(运动速度小于2 m/s)。在高速运动情况下,要考虑更高精度的时间同步方法。
(2) 信号采样频率不一致。比如Wi-Fi信号的采样频率为1/3 Hz,而加速度计的采样频率可以达到180 Hz。各种定位源的不同采样频率,要求定位算法具备不同历元处理不同数据组合的能力,包括数据掉包情形。室内定位的位置更新率应该大于等于1 Hz才能满足大多数位置服务的需求,尤其是跟人流动线相关的应用。
(3) 信号测量精度差异问题。低成本传感器容易受环境因素干扰,影响信号测量精度,如运动传感器的测量精度就很差,不能直接用于惯性导航,但可以用于步频探测。有些定位源如蓝牙天线阵列、视觉定位、音频定位等方法可以在局部范围内提供高精度距离、角度或坐标测量值。由于受布设成本的限制,这些高精度测量值不能广域覆盖。这就要求定位算法有足够的灵活性,融合不同观测精度的定位源,让有限的高精度测量值发挥最大的作用。
(4) 不同定位终端测量偏差问题。由于不同定位终端(如手机)硬件上的差异,它们对同一定位源的测量值是存在偏差的。比如不同手机对同一Wi-Fi基站的信号强度(RSSI)测量值是有偏差的,这种偏差虽然不很大,但足以影响定位精度。不同手机的相机参数也不一样,在定位时必须考虑定位终端硬件上的差异,通过定标的方法,消除它们定位的影响。这点对高精度定位(优于1 m)尤为重要。
2.3 移动终端上有限的计算资源
移动终端的计算资源主要体现在3个方面:有限的计算能力、有限的供电能力和有限的存储能力。随着智能手机的计算性能越来越高,一些复杂的定位算法如视觉定位,粒子滤波等都慢慢出现在室内定位的视野里。由于智能手机是一个多功能的终端,定位功能只能占据小部分的CPU处理时间以保证其他主流功能如打电话、微信、拍照等正常工作。从节能的角度看,不管手机的计算性能有多高,都不可以让智能手机处于连续高速运算状态,否则手机电池很快就耗尽。除此之外,智能手机上的存储能力也有限,不足以运行复杂的定位算法如图像处理和复杂的深度学习算法。
3 室内定位技术发展趋势
在谷歌、苹果、百度、华为、阿里巴巴等国际IT巨头的引领下,室内定位已经迈入新的时代。谷歌把室内定位技术VPS(visual positioning service)列为其核心技术,充分彰显室内定位在未来人工智能应用中的重要性。室内定位技术的发展趋势包括如下3个方面:① 探索新的定位源,形成高精度、高可用定位技术;② 异源异构定位源的高效融合;③ 基于GIS的语义约束定位和语义认知协同定位。
3.1 探索新的定位源,形成高精度、高可用定位技术
当前,国际上最新的室内定位研究开始探索新的基于视觉、光源信号、音频信号和射频信号的定位技术。苹果致力于推出基于低功耗蓝牙的iBeacon定位技术,谷歌把焦点放在视觉定位上,而百度携手芬兰IndoorAtlas公司聚焦磁场、传感器和iBeacon的融合。
当打开智能手机时,能保证无处不在、无时不有的定位源是磁场和手机内置传感器。但是,磁场匹配和传统的运动传感器只能支持2~5 m的定位精度,在物理上不支持更高精度(如分米级)定位方法。因此,必须寻找新的传感器和新的定位源以实现高精度定位,这些传感器包括手机相机、音频传感器、光线传感器和新的射频信号(如5G,BLE5.0) 等。
相机是视觉定位的所依赖的传感器,在场景光和图像特征充足的场景下,能够实现分米级甚至厘米级的定位精度。当光学相机影像和深度相机点云组合时(如谷歌的Tango技术),其定位功能就更加强大。定位时分为两步:图像特征库的建立和相机交会定位。图像特征库的建立需要在定位场景采集大量重叠图像,通过密度匹配和光束平差解算图像特征的物方坐标。图像特征库的建立可一通过事后处理的方法在高性能的云服务器上完成。相机交会定位是通过手机拍摄图像,提取单张图像的特征值,再与图像特征库里的图像特征进行匹配,利用匹配的图像特征点的物方坐标通过交会的形式,确定手机相机的位置和姿态。视觉定位能提供绝对位置,可以与传感器和射频定位技术相融合,提高其可用度。视觉定位的精度虽然很高,但对定位场景的光线要求高,计算量很大,对移动终端的计算性能和存储性能要求高。
音频定位是通过测量声音从音频基站到智能手机的传播距离来确定智能手机的位置的。由于智能手机的音频传感器是为接收和播放音乐而设置的,它的工作频段在0~21 kHz左右。一般音乐或人们声音的频率都小于16 kHz,所以可以利用16~21 kHz这一频段进行定位。定位时音频基站的时钟需要一个同步控制点对定位场景内所有基站实现同步。由于声音的传播速度只有340.29 m/s,时间同步的要求不高。对于分米级的定位精度,同步精度达到0.1 ms就可以(等价于3.4 cm的距离测量误差)。
光源编码定位技术[58-59]是以一个安装在天花板上带开/关扇格的LED光罩为定位源,通过旋转光罩以及接收开/关扇格在地面的光投影时序模式来确定智能手机的位置(如图 2所示)。光罩被划分为8圈,每圈48格(投影到地面成384扇区),每圈的编码(开/关)都不一样。通过旋转光罩,使得在每一扇区内的手机记录的光线强度的时间序列测量值的模式不同,判断手机所在扇区。同过特殊编码和信号分析来计算手机在扇区内的相对位置。再通过精确测定手机在扇区内的相对位置,可以在不改变手机硬件的前提下实现5~10 cm定位精度。
| 图 2 光源编码定位示意图Fig. 2 The diagram of positioning with light coding |
图选项 |

在射频信号方面,蓝牙5.0和5G信号将在室内定位方面发挥重要的作用。蓝牙技术具有功耗低、传输速度较快的特点,在消费物联网领域大获成功。蓝牙5.0在通信速度、功耗、通信距离和容量等方面都有显著提高。跟蓝牙4.0比,通信速度提高8倍,而通信距离将提高4倍。所以,单一基站的信号覆盖范围将是目前BLE 4.0信号的16倍,这意味着将大大降低定位基站布设成本。在定位精度上也期待着进一步的提高。新一代的蜂窝无线网络如5G已经开始考虑室内定位的功能。如前所述,5G白皮书已明确要求室内外定位精度优于1 m[37-38]。所以,基于5G的无线定位技术有可能成为未来室内定位的核心技术之一。
表 2列举并简单分析了上述几种室内定位前沿技术。受限于室内定位复杂环境影响,上述不同定位技术在定位精度、可靠性、可用性、对基础设施的依赖性等方面各有优缺点,这些高精度定位技术将相互补充。
表 2 未来室内定位前沿技术的特点和作用Tab. 2 The characteristics and the function of the future technologies of indoor positioning
| 前沿技术 | 特点 | 作用 | 定位精度 | |
| 视觉定位 | 相机交会定位技术 | 可同时定位和定姿;能够感知环境图像特征变化,属于一种SLAM技术;对环境光线和特征有要求 | 为多源混合定位方案提供高精度定位和定姿基准;并为PDR提供快速初始化信息;维持室内众源数据库的更新 | 在图像特征显著场景下,分米级 |
| RGB-D深度相机定位技术 | 相比普通相机拥有景深信息,可同时使用角度和距离交会的方法得到分米级定位结果;目前价格和功耗较高,但未来很有可能成为手机标配 | 相比普通相机减少了对环境光和环境图像特征的依赖,因此可作为基于光学视觉交会定位所提供的高精度基准的补充 | 分米级 | |
| 光源编码定位 | 精度高,移动端功耗低;适用于室内开阔区域;需要做集中布设 | 作为室内开阔区域的骨干定位手段之一 | 分米级 | |
| 基于新一代通信基站信号的高精度定位 | 覆盖范围广,可用性强;依赖5G技术标准的确定和推广 | 提供大空间尺度的较高精度定位信息;保障定位可用性的骨干手段 | 亚米级 | |
| 音频室内定位 | 不依赖光照条件和无线基站覆盖;需要专门的分散布设音频基站 | 对停车场等图像定位效果不佳、手机信号覆盖不良区域提供高精度定位手段 | 分米级 | |
表选项
3.2 异源异构定位源融合
目前室内定位领域的技术发展趋势是使用一种可靠的估计方法, 将两种以上有互补特性的定位源有效组合, 以获得优于单独定位源定位性能,有效提高系统的定位的精度、可用性和抗差能力,形成高可用低成本的室内定位解决方案。
在异源异构定位源融合方面,需要一个集成硬件标定、单源定位和多源融合定位的完整解决方案,多源定位信息的智能融合方法采用“高精基准控制,紧耦多源融合”的技术路线,以高精度定位技术为控制基准,包含传感器PDR和磁场匹配为纽带,融合声、光、电、场的多源定位技术,采取紧耦合的算法,获得当前位置的最优估计,同时经过适当的滤波处理分析识别定位源中的粗差数据,采用合适的方法(粗差剔除或调整方差矩阵)最小化粗差的影响,获得精确和可靠的定位结果。在定位源充足的情况下,优化定位源的组合,用统计手段,实现多源互检,粗差剔除,确保混合定位解的稳定性和可靠性。
3.3 基于GIS的语义约束定位和语义认知协同定位
GIS领域在“十二五”期间,研究重点已从室外逐步转向室内,但在对室内定位支持较弱,基于GIS的语义约束定位和语义认知协同定位是新的研究方向。室内GIS系统一方面为室内定位技术提供室内地图和特征库提供采集、建模、管理和可视化等基础支撑;另一方面,充分挖掘室内地标潜在价值,提供针对室内位置文字特征的语义定位能力,为其他室内定位技术提供空间约束。然而,由于室内缺少精确的GNSS数据,不能获取精确地采集设备的位置轨迹数据,在测图及建模过程中,存在位置偏移及建模精度偏差的问题。因此,建立对未来高精度智能室内定位系统提供基础支撑室内GIS系统,需要考虑并解决如下关键技术:① 建立统一时空基准下的室内GIS数据模型;② 建模与定位实时协同的即时室内建模方法;③ 利用众源数据支持的地图变化发现与更新;④ 以视觉定位过程中实时获取的三维场景模型为输入,对定位场景语义计算与认知。
4 结论
与开放的室外空间相比,室内环境在空间布局、拓扑、信号传播环境等方面更加复杂,导致室内定位理论、定位源、定位技术及空间信息处理方式室外有很多不同。虽然可用的室内定位源很多,到目前为止,除GNSS接收机以外,所有用于定位的智能手机内置传感器和射频信号都不是为定位而设置的。这些传感器和射频信号测量值的观测误差很大。目前室内定位源包括3大类:GNSS接收机、传感器和地基射频信号。高灵敏度GNSS接收机的室内定位精度在10~50 m。融合传感器、Wi-Fi及磁场等定位源的定位方案可实现2~5 m的定位精度。室内定位所面临的难题包括3方面:复杂的空间拓扑关系,信道环境、异源异构的定位源和移动终端上有限的计算资源。发展趋势包括探索基于音频、光源编码、射频基站和视觉等高精度定位技术。这些新定位技术可在局部范围内实现厘米到分米的定位精度。要实现广域覆盖,高精度定位技术还需与传感器和地磁等无处不在、无时不有的定位源紧密融合。
【引文格式】陈锐志,陈亮。基于智能手机的室内定位技术的发展现状和挑战[J]. 测绘学报,2017,46(10):1316-1326. DOI: 10.11947/j.AGCS.2017.20170383

更多精彩内容:
院士论坛| 龚健雅:高分辨率光学卫星遥感影像高精度无地面控制精确处理的理论与方法
院士论坛| 高俊:图到用时方恨少, 重绘河山待后生——《测绘学报》60年纪念与前瞻

权威 | 专业 | 学术 | 前沿
微信投稿邮箱 | song_qi_fan@163.com
微信公众号中搜索「测绘学报」,关注我们,长按上图二维码,关注学术前沿动态。
欢迎加入《测绘学报》作者QQ群: 297834524
进群请备注:姓名+单位+稿件编号



