Road vehicles - Performance requirements and testing methods for Blind Spot Detection (BSD) System
本标准按照 GB/T 1.1 -2009 给出的规则起草。
本标准由全国汽车标准化技术委员会(SAC/TC114)归口。
上海机动车检测认证技术研究中心有限公司
中国汽车技术研究中心有限公司
中国第一汽车股份有限公司
东风商用车有限公司
奇瑞汽车股份有限公司
东软睿驰汽车技术(沈阳)有限公司
上海海拉电子有限公司
上海汽车集团股份有限公司技术中心
博世汽车部件(苏州)有限公司
神龙汽车有限公司
通用汽车(中国)投资有限公司
广州汽车集团股份有限公司汽车工程研究院
戴姆勒大中华区投资有限公司
北京汽车集团越野车有限公司
本标准起草人:于峰、王兆、曹建永、孙航、吴杭哲、解瀚光、钱亚容、沈红荣、张春民、张磊磊、 胡睿、张奥、王鹏、胡旭辉、董尧、李易南、庄云龙、周建雄、陈锋。
本标准规定了汽车盲区监测(BSD)系统的一般要求、性能要求和试验方法。
本标准适用于安装有盲区监测系统的 M 和 N 类车辆。不适用于汽车列车、钗接式客车和专用作业车。
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
3.1 盲区监测 blind spot detection;BSD
实时监测驾驶员视野盲区,并在其盲区内出现其他道路使用者时发出提示或警告信息。
3.2 试验车辆 subject vehicIe
按照本标准要求,进行 BSD 系统试验的被测车辆。
3.3 相邻区域 adjacent area
注:
相邻区域是指试验车辆周围车道的区域。相邻区域的位置和大小根据试验车辆界定(不考虑车道标记).
![]()
3.4 目标车辆 target vehicIe
3.5 盲区监测范围 detection coverage area
由左侧与右侧相邻区域组成的 BSD 系统监测区域。
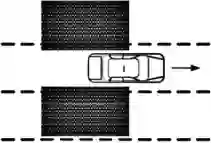
3.6 横向距离 lateral distance
试验车辆车身最外缘(近目标车辆侧,不包括外后视镜)与目标车辆车身最外缘(近试验车辆侧,不包括外后视镜)之间的横向距离,见图 2。
![]()
说明:
1— 试验车辆;
2—目标车辆:
3—横向距离。
图 2 横向距离
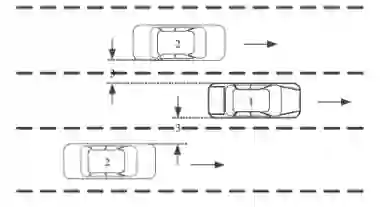
3.7 纵向距离 longitudinal distance
试验车辆前部位于第九十五百分位眼椭圆的中心与目标车辆最前端之间的纵向距离,见图 3。
![]()
3.8 转向盲区监测 steering blind spot detection
在车辆转向过程中,实时监测驾驶员转向盲区,并在其盲区内出现其它道路使用者时发出警告信息。
3.9 自检 seIf-check
4.1 概述
4.2 系统开启与关闭
BSD 系统应具备手动开启或关闭的功能。
手动关闭时,应以符合 4.4.2 规定的指示信号发出状态指示。
4.3 激活要求
BSD 系统开启且处于非激活状态时,系统可检测目标车辆,但不应向驾驶员发出警告。BSD 系统激活时,系统至少能通过下列方式之一激活:
车辆速度达到系统设计的最低激活车速时系统自动激活。
系统接收到车辆发出的转向信号或判定其即将或正在进行转向操作时,自动激活目标转向区域一侧的系统功能。
4.4 人机交互要求
系统应采用易被驾驶员感知的方式发出警告信息,并能清晰地指示目标车辆出现的一侧。警告指示信息应明显区分于车辆中其他系统的警告信息。
系统应具有开启状态 / 关闭状态的指示。该指示应目视可见。
系统应具有系统故障指示提醒功能,其提醒状态标识应能被驾驶员清晰观测。
4.5自检要求
自检时,不应出现明显的延迟;在发生电子、电器故障时,故障指示也不应出现明显的延迟。
4.6 其他
盲区监测系统的操纵件、指示器及信号装置的标志应符合 GB 4094 的相关要求。
盲区监测系统的效能不应受电磁场的不利影响,其电磁兼容性应符合 GB 34660 的要求。
5.1 概述
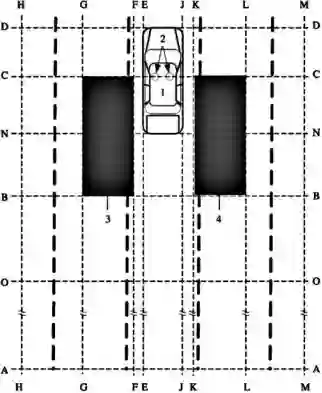
Mi、M 类车辆盲区监测范围如图 4 所示,图中线条旨在更准确说明盲区监测警告要求,右侧、左侧和后部等描述参考试验车辆的行驶方向,图中所给出的所有尺寸均相对试验车辆而言,具体各线条含义如 下所示:
——线 A 平行于试验车辆后缘,并位于试验车辆后缘后部 30.0 m处
——线 B 平行于试验车辆后缘,并位于试验车辆后缘后部 3.0 m处
——线 C 平行于试验车辆前缘,并位于第九十五百分位眼椭圆的中心
——E 平行于试验车辆的中心线,并位于试验车辆车身(不包括外后视镜)左侧的最外缘
——线 F 平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左侧最外缘相距 0. 5 m
——线 G 平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左侧最外缘相距
3.0 m
——H 平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左侧最外缘相距 6.0 m
——J 平行于试验车辆的中心线,并位于试验车辆车身(不包括外后视镜)右侧的最外缘
——线 K 平行于试验车辆的中心线,并位于试验车辆车身右侧最外缘的右边,与右侧最外缘相距
0.5 m
——线 L 平行于试验车辆的中心线,并位于试验车辆车身右侧最外缘的右边,与右侧最外缘相距
3.0 m
——线 M 平行于试验车辆的中心线,并位于试验车辆车身右侧最外缘的右边,与右侧最外缘相距
6.0 m
——线 0 平行于试验车辆后缘,并位于试验车辆后缘后部 10.0 m处
![]()
2—第九十五百分位眼椭圆的中心,参考 GB/T 36606-2018 定义,M 类车辆参考;
3—FCGB 围成的区域为直线工况下的车辆左侧盲区监测范围;
4—KCLB 围成的区域为直线工况下的车辆右侧盲区监测范围。
5.1.2 M2、M3、N2、N3 类车辆盲区监测范围
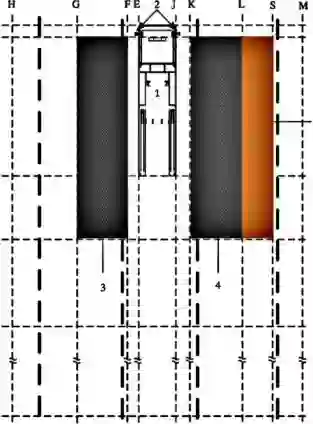
M2、M3、N2、N3 类车辆盲区监测范围如图 5 所示,图中线条旨在更准确说明盲区监测警告要求,右侧、 左侧和后部等描述参考试验车辆的行驶方向,图中所给出的所有尺寸均相对试验车辆而言,具体各线条 含义如下所示:
——线 A 平行于试验车辆后缘,并位于试验车辆后缘后部 30.0 m 处
——线 B 平行于试验车辆后缘,并位于试验车辆后缘后部 3.0 m 处
——线 C 平行于试验车辆前缘,并位于后视镜的位置
——线 D 为试验车辆前缘的双向延长线
——线 E 平行于试验车辆的中心线,并位于试验车辆车身(不包括外后视镜)左侧的最外缘
——线 F 平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左侧最外缘相距 0.5 m
——线 G 平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左侧最外缘相距 3.0 m
——线 H 平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左侧最外缘相距 6.0 m
——线 J 平行于试验车辆的中心线,并位于试验车辆车身(不包括外后视镜)右侧的最外缘
——线 K 平行于试验车辆的中心线,并位于试验车辆车身右侧最外缘的右边,与右侧最外缘相距 0.5 m
——线 L 平行于试验车辆的中心线,并位于试验车辆车身右侧最外缘的右边,与右侧最外缘相距 3.0 m
——线 S 平行于试验车辆的中心线,并位于试验车辆车身右侧最外缘的右边,与右侧最外缘相距 4.5 m
——线 M 平行于试验车辆的中心线,并位于试验车辆车身右侧最外缘的右边,与右侧最外缘相距 6.0 m
——线 0 平行于试验车辆后缘,并位于试验车辆后缘后部 10.0 m 处
![]()
3—FCGB 围成的区域为直线工况下的车辆左侧盲区监测范围
4—KCLB 围成的区域为直线工况下的车辆右侧盲区监测范围
5—KCSB 围成的区域为右转工况下的车辆右侧盲区监测范围
图 5 M2、M3、N2、N3
类车辆盲区监测范围示意图
5.2 技术要求
盲区监测功能应覆盖左右两侧的相邻区域。直线行驶工况下目标车辆应为 6.2.1 规定的汽车或者摩托车,当目标车辆为汽车时,盲区监测系统应满足 6.4.2.1 规定的测试要求。
按 6.4.2 进行直线行驶工况试验,当目标车辆处于以下条件所列范围内时(见图 4、图 5),系统应发出左侧盲区警告:
如果目标车辆任何部位均未处于 A、D、E 和 H 四条直线交叉覆盖区域内,则不应发出左侧盲区警告。
5. 2.2.2 右侧盲区警告要求
按 6.4.2 进行直线行驶工况试验,当目标车辆处于以下条件所列范围内时(见图 4、图 5),系统应发出右侧盲区警告:
如果目标车辆任何部位均未处于 A、D、J 和 M 四条直线交叉覆盖区域内,则不应发出右侧盲区警告。
5.2.2.3 M2、M3、N2、N3 类车辆右转盲区警告要求
按 6.4.3 进行转向行驶状态试验,在试验车辆右转、目标车辆直线驶入 KCSB 围成右侧盲区监测区域 的过程中,当试验车辆前缘到达 6.4.3 所描述的最晚警告线 R 线时,盲区监测系统应发出警告。
5.2.3 系统响应
5.2.3.1 系统响应时间
当目标车辆从侧后方进入盲区监测范围时,从目标车辆进入盲区监测范围到系统发出警告的时间应不大于 300 ms。
5.2.3.2 可选盲区警告抑制
如果试验车辆正在超越目标车辆,且目标车辆从前方进入了监测范围,则可将盲区警告抑制一段时 间,警告抑制时间不应大于
2s。
6.1 测试环境条件
6.1.1 试验应在水平、干燥、具有良好附着能力的混凝土或沥青路面上进行。
6.1.2 测试时的环境温度应为 -20 ℃~40℃
6.1.3 水平可视范围应确保能够在整个试验中清晰观察目标。
6.2 目标车辆
目标车辆应为普通大批量生产的汽车或摩托车。目标车辆为汽车时,轴距应满足 2.0m~2.5m 的范围,作为替代,也可以采用表征参数能够代表车辆且适应系统传感器的柔性目标;目标车辆为摩托车时, 目标车辆的长度应为 2.0DT2.5ID,最宽点(不包括侧视镜)的宽度应为 0.7m~0.9m,高度(不包括挡风玻璃和驾驶员)应为 1.1 m~1.5 m。作为替代,也可以采用表征参数能够代表摩托车且适应系统传感器的柔性目标。
6.2.2 M2、M3、N2、N3 类车辆右转试验要求的目标车辆
目标车辆应为普通大批量生产的自行车,自行车的长度应为(1.8±0.2)m,高度(包含成年骑行者) 应为(1.7±0.2)。作为替代,也可以采用表征参数能够代表自行车且适应系统传感器的柔性目标。
6.3 试验测量系统
——能测量试验车辆后缘与目标车辆前缘之间的纵向距离(假设目标车辆位于试验车辆后方)
——能测量试验车辆前缘与目标车辆后缘之间的纵向距离(假设目标车辆位于试验车辆前方)
——能测量试验车辆最左边缘与目标车辆最右边缘之间的横向距离(假设目标车辆位于试验车辆左侧)
——能测量试验车辆最右边缘与目标车辆最左边缘之间的横向距离(假设目标车辆位于试验车辆右侧)
——能测量从目标车辆满足警告条件到发出警告的时间延迟
6.3.1.2 试验测量系统精度要求
试验测量系统应能达到如下精度:
——距离小 2m 时,测量精度应小于等于 0.1 m
——距离大于等于 2m 且小于等于 10m 时,测量精度应小于等于 5%
——距离大于 10m 时,测量精度应小于等于 0.5nu
——时间小于 200ms 时,测量精度应小于等于 20ms
——时间大于等于 200ms 且小于等于 1s 时,测量精度应小于等于 10%
——时间大于 1s 时,测量精度应小于等于 100 ms
6.4 盲区监测试验
6.4.1 概述
M、N 类试验车辆应按 6.4.2 所述分别进行直线行驶工况左侧盲区监测警告、右侧盲区监测警告试验 并符合相应要求。
M2、M3、N2、N3类试验车辆按6.4.3进行右转试验并符合相应要求。
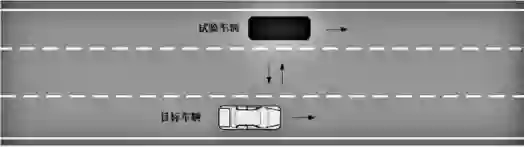
试验车辆以(40±2) km/h 匀速直线行驶,目标车辆(摩托车)以(55±5) km/h 由侧后方驶向并超越 试验车辆,行驶过程中应保持目标车辆(摩托车)车身的最外缘与试验车辆中心线之间的距离为 2.0 m~3.5m,见图 6。当目标车辆从侧后方行驶进入试验车辆盲区监测范围时,系统应发出警告,警告发出的时间不得晚于目标车辆前缘穿过图 4、图 5 所示 C 线。当目标车辆(摩托车)的前缘超越试验车辆图 4、 图 5 所示 C 线 3m 时,试验结束。
![]()
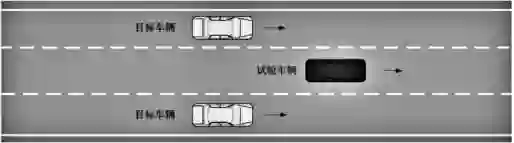
试验车辆以(50±2) km/h 匀速直线行驶,目标车辆以(50±2) km/h 匀速行驶并保持与试验车辆的横向距离为 6.0nT7.0m,见图 7。当目标车辆越过图 4、图 5 所示 B 线,完全在 C 线之后时,以 0.25 m/s~0. 75 m/s 的侧向速度分别从试验车辆侧后方进行变道,直至两车的横向距离为(1.5土0.3) m。变道完成后, 确保目标车辆仍然越过 B 线并且完全在 C 线之后,目标车辆至少保持直线行驶 300ms,然后变道返回最初车道线,试验结束。
当目标车辆并道接近试验车辆时,盲区监测系统应该当满足:
![]()
试验车辆以(50+2) km/h 匀速直线行驶,目标车辆在相邻车道匀速直线行驶并保持与试验车辆的横 向距离为(L5±0.3) m,目标车辆以高于试验车辆的速度匀速行驶并超越试验车辆,见图 8。目标车辆跟据表 1 规定场景的车速行驶于试验车辆侧后方,当两车达到试验开始两车纵向距离时,试验开始;当目标车辆的前缘超越试验车辆图 4、图 5 所示 C 线 3m 时,试验结束。
表 1 直线道路目标车超越试验车辆场景试验方案参数
![]()
当目标车辆接近试验车辆时,盲区监测系统应满足下列要求:
当目标车辆完全位于图 4、图 5 所示 A 线之后时,BSD 系统不应发出警告;
当目标车辆的任何部分位于试验车辆的盲区时,系统应发出警告,警告发出的时间不得晚于目标车辆前缘穿过 B 线后 300 ms.
![]()
试验车辆以(50+2) km/h 匀速直线行驶,目标车辆以(60±2)km/h 同车道驶向测试车辆,见图 9。开始测试时,目标车辆与试验车辆相距大于 20m,当目标车辆距试验车辆图 4、图 5 所示 B 线 10m 时,目标车辆以 0.55m/s~0. 85m/s 的侧向速度从试验车辆侧后方进行变道至两车的横向距离在(1.5+0.3)m。变道完成后,目标车辆保持直线行驶,直至目标车辆完全超越试验车辆的前缘,当目标车辆的前缘超越试验车辆图 4、图 5 所示 C 线 3m 时,试验结束。测试完成后应由试验车辆另一侧重复进行该试验。
![]()
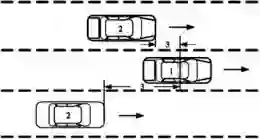
当目标车辆的任何部分进入试验车辆的盲区时,系统应发出警告,且警告发出的时间不得晚于目标车辆外缘穿过图 4、图 5 所示 B 线或 F 线后 300ms。
试验车辆以(50±2) km/h 匀速直线行驶,目标车辆以(60±2) km/h 在相邻车道匀速直线行驶并保持与试验车辆的横向距离为(1.5±0.3)m,如图 10 所示。开始测试时,目标车辆距试验车辆图 4、图 5 所示 B线纵向距离大于 11m;当最前缘超越试验车辆 C 线 3m 时,试验结束。
![]()
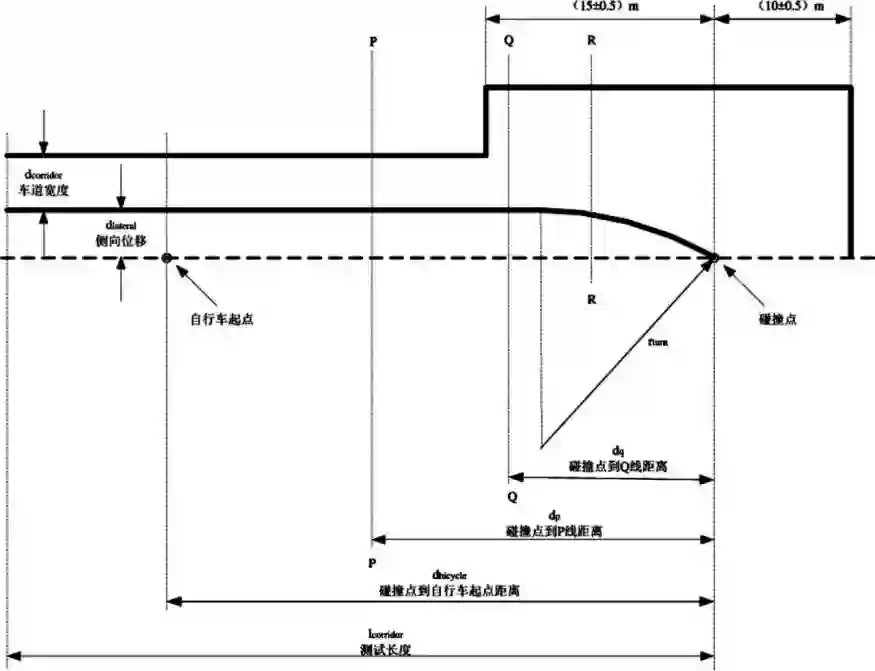
6.4.3 M2、M3、N2、N3 类车辆右转的测试
![]()
图 1
1 M2、M3、N2、N3
类车辆右转测试工况设置
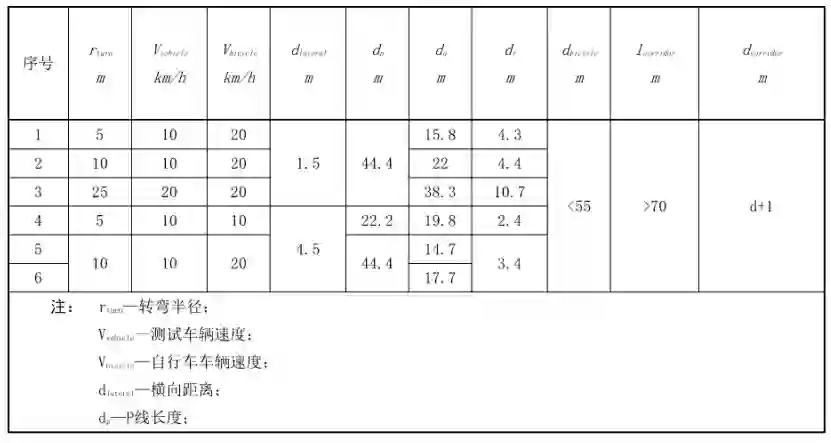
表 2
M2、M3、N2、N3
类车辆右转测试试验设施布置和尺寸参数
![]()
![]()
使用标记线和自行车假人按照图 11 和表 2 规定的试验设施布置、尺寸参数建立一个 M2、M3、N2、N3 类车辆右转盲区监测报警测试场景。
6.4.3.2 M2、M3、N2、N3 类车辆右转弯测试
将试验车辆和自行车假人从各自的起始位置按照规定的试验车速进行测试,试验要求试验车辆前缘 在通过图 11 中 Q 线(误差在 0.5m 以内)的同时自行车假人通过图 11 中 P 线(误差在 0.5m 以内), 试验车辆在规定车速(土2km/h 的范围内)向右转向,朝设定的碰撞点行驶。自行车假人以规定的速度, 至少保证自行车假人车速稳定 8s 以上,沿着规定的路线向预定的碰撞点移动。
当试验车辆前缘穿过R线时,盲区监测系统应发出警告。300ms 后结束试验。根据表 2 规定的参数,重复上述试验,验证 M2、M3、N2、N3 类车辆盲区监测系统性能。