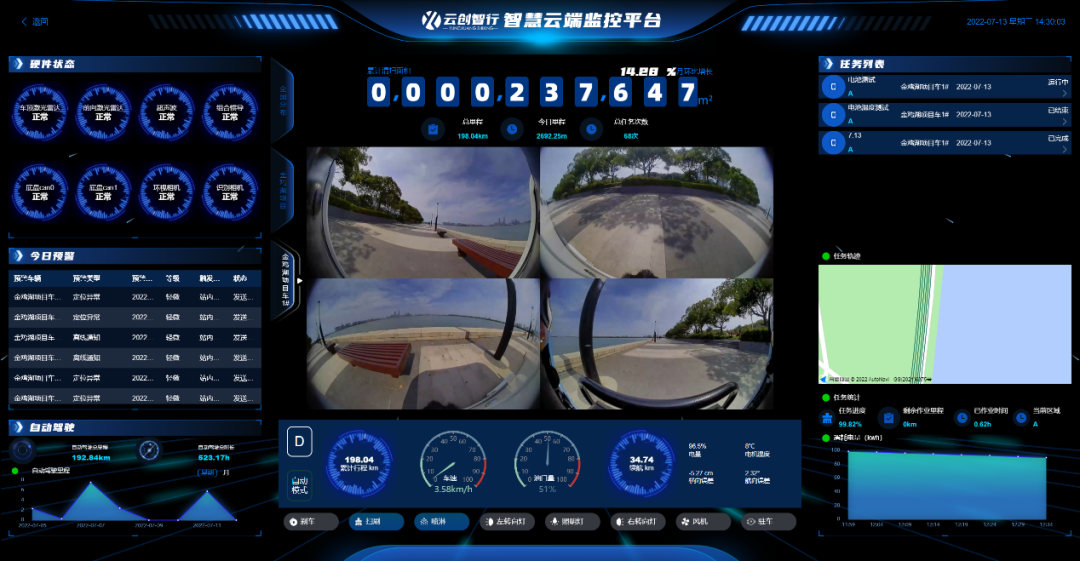
蔚来资本领投,无人环卫商「云创智行」完成数千万元Pre-A轮融资

来源丨快鲤鱼(ID:akuailiyu)
作者丨曹玉蓓
图源丨云创智行

![]()
快鲤鱼 l ID:akuailiyu
长 按 二 维 码 ,一 键 关 注





登录查看更多
相关内容
Arxiv
0+阅读 · 2022年9月13日
Arxiv
0+阅读 · 2022年9月10日
Arxiv
0+阅读 · 2022年9月10日


相关VIP内容
相关资讯