Science Robotics近日刊登CMU重大突破,无需手术,普通人就能用意念操控机械臂!
来源:机器人大讲堂
导读
顶尖学术期刊《科学》旗下的Science Robotics本月19号刊登了脑机接口(BCI)领域的一项突破成果。美国卡内基梅隆大学的贺斌教授带领其研究团队与明尼苏达大学合作,成功开发出第一款非侵入式的意念控制机械臂,能够连续跟踪随机运动的计算机光标。这项技术将帮助众多瘫痪患者和运动障碍患者大大提升生活质量,也有望为普通人群带来广泛的应用。
用意识控制物体似乎一直是科幻电影中才会存在的超能力

其实,科学家们早已将这种超能力带到了我们的现实生活中。不过,成功控制诸如机械臂之类设备的脑机接口技术都要通过手术在人的脑部植入电极、芯片等。
史上首个成功的非侵入式意念控制机械臂
现在,卡内基梅隆大学(CMU)生物医学工程系教授贺斌团队开发出了一种可与大脑无创连接的脑机接口,能让人用意念控制机器臂连续、快速运动。
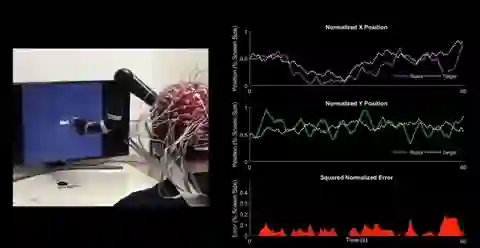
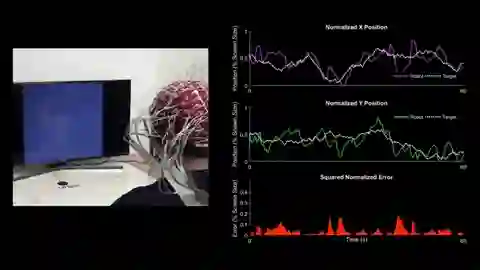
▲用户使用BCI控制机械臂稳定、连续跟随移动的光标
据悉,在二维平面控制光标移动的传统任务中,相比非侵入式BCI,这种新型的BCI学习效果提高了近60%。研究人员还开发了一个更接近现实使用的情境,也就是由用户采用运动想象来连续追逐随机移动的光标,这个任务的学习成绩提高了5倍以上。
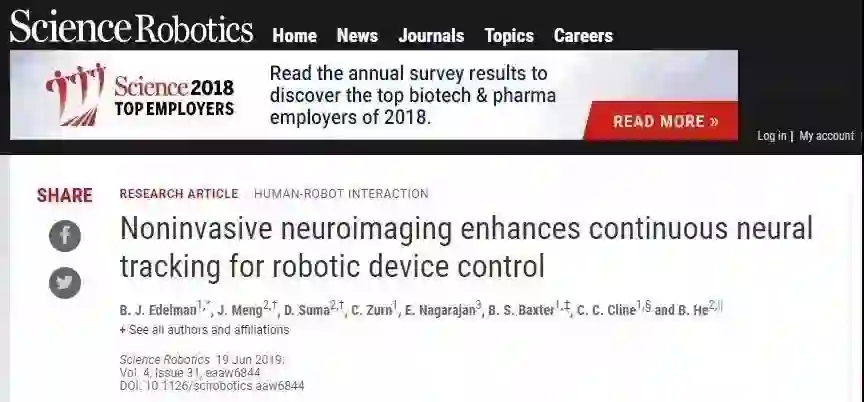
论文地址:
https://robotics.sciencemag.org/content/robotics/4/31/eaaw6844.full.pdf
有创和无创的脑机接口
连接人脑和机器的其中重要一步是获取电信号,主要分为有创和无创的脑机接口。
有创的脑机接口需要通过手术向头部植入电极来实现脑电信号的获取。这样做的好处就是可以直接从大脑皮层获取信息,可以避免神经信号因为远距离传输而衰减,通过这种技术记录到的信号具有极高的信噪比和良好的分辨率。
目前已经证实从脑植入电极感测到的信号来控制机器人设备的良好性能。
但是问题也很明显,首先就是植入手术过程中具有潜在的风险,其次,电极也很难精确的植入到对应的脑区,随着时间的推移,电极也会被疤痕组织覆盖,这样神经信号就会大幅衰弱,需要重新植入。
无创脑机接口则不需要手术,直接从人的头皮表面记录神经信号,这种方式对人体损害小,而且相较于有创脑机接口,人类可以节省大量的训练时间。
这种方式的问题也很明显,由于是在脑外,获得的神经信号更容易受到噪声的干扰,在强度上也远不如有创脑机接口。这是无创脑机接口急需解决的问题。
新成果的重要价值
这一次卡内基梅隆大学和明尼苏达大学的研究人员正是在无创脑机接口领域获得了突破性的进展。通过使用新颖的传感和机器学习技术,研究人员的设备能够访问大脑深处的信号,实现对机器人手臂的高分辨率控制。通过无创神经影像学和一种新颖的连续追踪范式,克服了嘈杂的脑电信号,从而显著改善了基于脑电图的神经解码,并促进了实时连续的2-D机器人设备控制。

迄今为止,这项技术已经在68名身体健全的人体受试者身上进行了测试(每个受试者最多10次),包括虚拟设备控制和机器人臂的控制,以便持续追踪。同时,这项技术可直接适用于患者,团队计划在不久的将来进行临床试验。
科幻终将成为现实
关注过《挑战不可能》的朋友,可能记得一名特殊的渐冻症患者——王甲。他正是使用了来自清华大学医学院神经工程团队带来的无创脑机接口才完成了不可能的挑战。
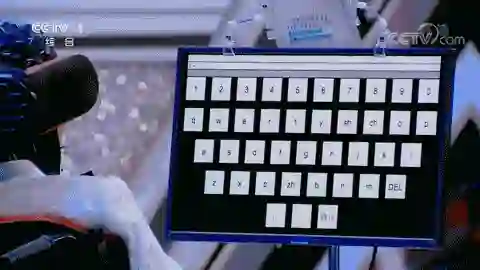
王甲由于患上“渐冻症”,失去了几乎所有运动的机能,清华大学的神经工程团队为王甲打造了一款无创脑机接口打字系统,通过对视觉神经信号的解码来完成打字的任务。这重新建立了王甲和这个世界的联系。
事实上,目前的脑机接口技术主要的目标人群是像王甲一样的残疾人,为他们尽可能的恢复与这个世界的联系。
在未来,脑机接口技术也会走向普通大众,摆脱各种操作面板、鼠标、键盘,通过人的思维来直接控制计算机和机器,这肯定是脑机接口未来发展的方向。正如卡内基梅隆大学生物医学工程系主任贺斌教授所说的:“这项技术有朝一日可能成为帮助每个人的普遍辅助技术,就像智能手机一样。”
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”




