无人潜航器(UUV)的普及为海洋领域带来了新的机遇和威胁。与传统海军平台相比,无人潜航器具有商业可用性和低购置成本,为经济和军事上处于劣势的敌国提供了在海底领域竞争的能力。无人潜航器可对港口、航道、石油平台、海底电缆和管道等海基和沿海基础设施构成威胁。如果对手有能力收集有关这些基础设施的情报、对其进行破坏或使其处于危险之中,将使美国经济及其贸易伙伴付出高昂的代价。除了对关键基础设施的威胁外,UUV 还威胁到美国和盟国水雷作为非对称海战工具的有效性。先进的无人潜航器和传感器包向敌国扩散,使其能够探测、绘制地图,并有可能使盟军水雷失效或避开盟军水雷,从而使水雷失去获取和维持制海权的主要作用。Blandin 等人(2013 年)预计有必要开发反 UUV(cUUV)系统,以减轻这些 UUV 威胁。
本毕业设计报告总结了从系统工程角度开发和分析 cUUV 系统概念的研究工作。这项研究的核心目标是识别 UUV 在技术和操作方面的威胁漏洞,然后开发一套 cUUV 架构来展示如何利用这些漏洞。基于模型的系统工程(MBSE)技术用于评估架构的有效性,其总体目标是为开发 cUUV 能力提供一种有组织、有系统的方法。为实现这一目标,开发了一种迭代系统工程流程,用于指导研究工作。
通过对市场上现有的无人潜航器平台、传感器有效载荷及其技术规格进行市场调查,确定了需要应对的潜在威胁无人潜航器系统的问题空间。该调查研究了 237 种 UUV 系统的关键参数和能力及其任务应用(AUVAC 数据库 n.d.)。调查发现,大多数 UUV 可用于多种任务类型,虽然 UUV 的物理参数(如尺寸和重量)会影响最大工作深度和续航时间等指标,但物理参数与任务应用之间没有特定的相关性。因此,我们开发了一种具有普遍威胁的 UUV 结构模型。
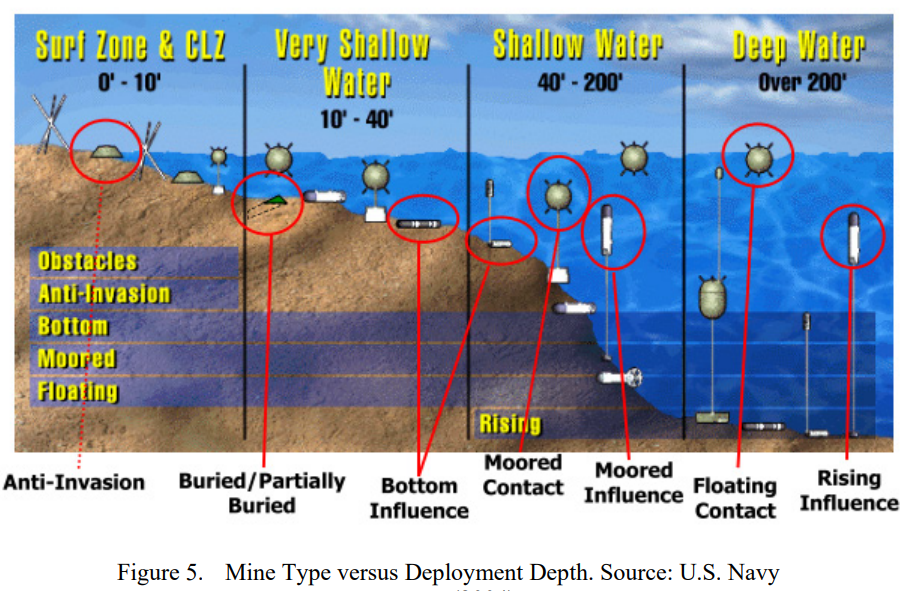
Blandin 等人(2013 年)确定了四个潜在的未来军用 UUV 任务领域: 信息作战 (IO);情报、监视和侦察 (ISR);水雷对抗 (MCM);以及进攻性攻击作战 (OAO)。鉴于美国海军已有成熟的基于 UUV 的 MCM 条令,并假定对手可能会追求类似的能力,这项工作的重点是开发与 MCM 任务相关的 cUUV 系统概念。随后进行的详细研究审查了操作环境限制、受威胁 UUV 的操作概念 (CONOPS) 以及功能和物理架构,以便从完整的系统角度了解受威胁 UUV 可能如何执行 MCM 任务。在这一问题空间定义阶段确定的结果被用于制定具有广泛适用性的 cUUV 分类法,该分类法定义了反威胁 UUV 的使用概念、功能和方法。
为建立 cUUV 系统概念开发框架以应对多式联运威胁,将 cUUV 分类法应用于多式联运 UUV 任务,以描述 cUUV 问题空间。然后使用基于智能体的建模(ABM)软件包 NetLogo(Wilenski,1999 年)对受威胁的多用途无人潜航器进行建模,并使用多种参数值进行模拟,目的是 (1) 评估系统在执行多金属结核调查任务时的基线性能,以及 (2) 确定表明 cUUV 系统存在漏洞的参数。
评估 UUV 威胁任务时使用了三个性能指标(MOPs):漏雷百分比、水雷标记位置误差平均值和水雷标记位置误差标准偏差。这些 MOP 代表了所绘制雷区地图的实用性,最佳地图的漏雷率、标记位置误差平均值和标记误差标准偏差都较低。一个有效的反无人潜航器解决方案会增加漏掉的水雷数量,以及发现的水雷的位置误差和不确定性。模拟结果发现,侧扫声纳(SSS)的声学性能下降对漏失水雷的数量有显著影响,而受威胁的 UUV 导航航向噪声增大导致水雷标记误差测量值增加。通过建模、模拟和统计分析,深入探索了问题空间并确定了威胁 UUV 的薄弱环节,在 cUUV 分类框架内定义了三种潜在的 cUUV 结构,并在 ABM 软件中进行建模,以评估其防御威胁 MCM UUV 雷场的有效性。
第一个 cUUV 系统概念,即多普勒速度记录(DVL)欺骗系统(DSS),采用了一种有针对性的攻击使用概念,利用 cUUV 分类法中的 "混淆导航 "方法扰乱受威胁的 UUV。该系统概念由分布在雷场各处的节点阵列组成,这些节点可被动探测威胁 UUV,并向 UUV 的 DVL 发送虚假导航信号,增加其导航和水雷位置误差澳门威尼斯人官网作。仿真结果表明,DSS 概念影响了目标 MOP,但与基线威胁 UUV 导航性能相比,影响幅度不大。
第二种 cUUV 系统概念展示了使用 cUUV 分类中的干扰传感器方法破坏威胁 UUV 的一般区域防御 (GAD) 使用概念。气泡帷幕系统(BCS)概念包括一个由加压气管组成的网格,该气管沿其长度方向发射气泡,以衰减受威胁 UUV 的 SSS 信号,增加其未命中水雷的 MOP。BCS 模拟结果表明,该系统的有效性在很大程度上取决于雷场内气泡管道的布局。对 SSS 产生广泛声学影响的 BCS 几何结构对水雷未命中 MOP 的影响最大。这对 BCS 的部署提出了挑战,因为受威胁的 UUV 的搜索模式是未知的。
无人潜航器探测跟踪杀伤(UDTK)系统是一个系统的概念,包括一个探测和跟踪威胁无人潜航器的声学收发器阵列,以及一个拦截和摧毁威胁无人潜航器的武器化无人潜航器。该概念展示了一种有针对性的攻击使用概念,即使用 cUUV 分类中的 "破坏 "方法摧毁受威胁的 UUV。在 83% 的反弹道导弹模拟实验设计点上,UDTK 系统能够拦截威胁 UUV。ABM 建模方法是分析系统内不同元素之间、cUUV 系统与威胁 UUV 之间相互作用的关键,也是了解复杂系统的突发行为以确定它们如何影响 UDTK 拦截率的关键。
本研究对新兴的反 UUV 系统领域进行了研究,重点关注 MCM 任务空间,总体目标是为开发 cUUV 能力提供有组织、有系统的方法。已提出的 cUUV 任务结构分类法将任务分解为代表 cUUV 解决方案的操作和技术考虑因素的使用概念、功能和方法。基于智能体的模型提供了一个灵活而强大的工具,用于探索威胁多用途机动UUV、cUUV系统和环境之间复杂的系统相互作用。仿真结果不仅对所提出的 cUUV 系统概念的有效性,而且对更广泛的反 UUV 任务提供了重要见解。虽然本文介绍的三个 cUUV 系统评估了可进一步开发的可行系统概念,但本研究并不打算针对反潜监测 UUV 问题提出具体的技术解决方案。我们鼓励读者考虑结构化 cUUV 能力开发方法的更广泛影响。