美国海军任务规划器可提出后勤上可支持的舰艇使用计划,以最大限度地完成预期的军事任务。一个大洋行动区被划分为多个同质区域,每天都有任务分布在其中的许多区域(如反潜战、防空和海上拦截)。有些任务可能需要在同一区域同时执行其他任务(如扫雷可能需要防空保护),有些前提任务可能需要提前完成(如在港口突围前一天执行反潜战任务)。每艘舰艇,无论是作战舰艇、非武装军舰还是补给舰,都可以在称之为交替组合任务能力集的任何一种情况下执行任务,在这种情况下,舰艇可以同时完成一系列多重任务,尽管效果因所执行的任务集和舰艇的战备状态而异。规划器可以整合后勤舰艇的行动,为作战任务提供支持。然而,这些舰艇和其他非武装舰艇可能需要可在全区域范围内共享的战斗护卫,或必须保持密切的护卫。一个典型的场景涉及约 20 个区域、15 天的规划期限、300 项任务和 30 艘舰船。目标是提供一个反应灵敏、直观的作战规划助手。
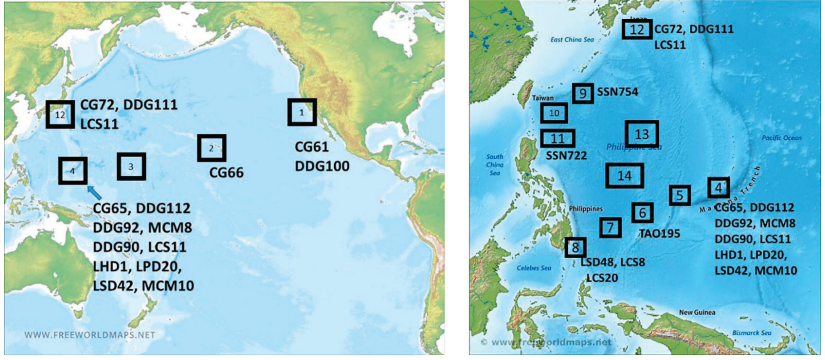
图 2. 责任区被划分为不连续的区域。每个区域代表一个节点(黑框),只要符合进入任一区域的限制条件(如轻型舰艇需要战斗护航),舰艇可以在任何一对节点之间过境。从圣迭戈(1)到珍珠港(2)的航程为 2623 海里,在航行中随机进行 30 度之字形机动,需要 5 天时间,航速为 24 节。为每艘船只、每一天及其可能占据的区域定义了一个节点。节点 8(菲律宾达沃)是我们补给工作的目标。这些区域的中心坐标见附录中的表 A.1。
美海军任务规划系统是一个基于优化的决策支持系统,可帮助作战规划人员确定预期冲突场景的特征,并为舰船在一段时间内的协调参与制定合理详细的后勤支持使用计划。
这里介绍的模型源于 Dugan(2007 年)推出的纯战斗计划器、Silva(2009 年)贡献的美化版、Hallmann(2009 年)对后勤的概括(此处最接近)以及 Baker(2019 年)的最新工作。新规划工具的后勤部分受到了 Brown 和 Carlyle(2008 年)的战斗后勤部队(CLF)规划器和 Brown 等人(2017 年)最新的海上补给规划器的启发(参见公开文献参考文献以及与民用远洋航运规划的比较)。关于(优化)安排海军战斗舰艇的公开文献只有几篇,但这些舰艇是极其昂贵的国家资产,如何充分利用对具有重要的战略意义。Brown 等人(1990 年)对大西洋舰队水面作战舰艇进行了为期一年的调度,时间分辨率为每周一次;Brown 等人(1996 年)对海岸警卫队 Cutters 进行了调度,时间分辨率为每周一次,时间跨度为计划季度。海军作战有许多模拟模型,但只对基于优化的决策支持感兴趣。希望明确行动方案的限制,并从模型中发现规划行动的最佳方法。
这种模型的相关性来自于这种作战规划必须频繁地编制和修改,以应对不断发展的世界事件。
美海军任务规划器预计将提供三个层次的建议:
1.最不复杂的是在责任区(AOR)内执行一系列不同空间的任务,每项任务的预计执行日期都在未来几周内。这些任务将由海军作战舰艇(如巡洋舰[CGs]、驱逐舰[DDGs]、濒海战斗舰[LCSs]等)完成,因为这些舰艇每天都会抵达责任区。地理位置很重要,从一个地点到另一个地点完成各种任务的运输时间是一个关键制约因素。任务之间也有依赖关系。例如,防空与导弹综合防御(IAMD)任务可能需要在某个特定地点执行反潜战(ASW)任务。作战人员能够同时执行一种以上的任务,但效果各不相同,这取决于同时执行的任务组合以及特定作战人员的战备状态、训练水平和武器库存。必须安排作战舰艇在特定地点和时间执行必要的后勤(如加油)任务。这些任务可能发生在港口(INREP),也可能发生在位于海上的后勤 "加油站"(UNREP),但不一定与作战任务同时进行。
2.后勤补给舰(如 T-AKE、T-AO、T-AOE)为作战舰艇提供补给(如补给舰出动 "送货员 "与航行中的作战舰艇会合)的复杂程度更高。这些不设防舰艇可能需要作战舰艇护航才能过境或访问某些区域,此类护航活动可能在同一区域内进行(如 IAMD),也可能必须与作战舰艇近距离护航(如 ASW)。
3.最后一个复杂因素是包括非武装(或轻型武装)作战舰艇(如登陆平台/船坞[LPD]、登陆直升机船坞[LHD]、登陆直升机攻击舰[LHA]、两栖或水雷对抗[MCM]舰艇),这些舰艇可能需要武装作战舰艇护航。
在情况 1 中,任务集已提前制定好,剩下的问题就是每天向每个区域派遣哪些舰艇,以按时完成尽可能多的任务。任务的价值各不相同,我们要在满足机动性、同时和有条件完成任务以及战斗舰艇及其任务的不同效率等限制条件的前提下,最大限度地提高我们预计能实现的总价值。
在情况 2 中,增加了后勤舰艇,它们也有自己的机动性和商品限制。
最后,情况3可以增加任务的多样性,包括两栖攻击等。这涉及到更多需要战斗防御的舰船,对早期净评估最为有用。
预计,规划器将从情况 1 开始,然后细化到情况 2,最后在逐级降低的作战指挥规划中明确情况 3 的细节。
部署网络流程模型
引入了一个具有代表性的场景,即 "第二次菲律宾海海战"(Morrison(1963 年)对二战中的原始海战进行了详细描述,Kline(2010 年)则以这一同名事件为例)。
AOR 被划分为不连续的区域(如图 2)。
一组船只中的每一艘都会到达其中一个区域,并在已知的某一天进入控制范围,这一天不一定是规划范围的第一天,也不一定是规划范围的持续时间。我们为每一天和每一区域定义一个节点。随后,每艘船都可以通过相邻的弧线从一个节点向前移动。
按天划分的区域有各种类型的任务,每种任务都有一个给定值。有些任务取决于其他前提任务的完成情况,可能是在前几天完成的。这些相互依存的任务被称为任务包。
每天,每艘舰艇(例如,见图 3)都可以使用一组组合任务能力(CMC)中的任意一个--这是一组舰艇可以同时执行的任务,其有效性可能会受到组合任务能力集中其他任务和舰艇战备状态(武器库存、设备状态、船员培训等)的影响。
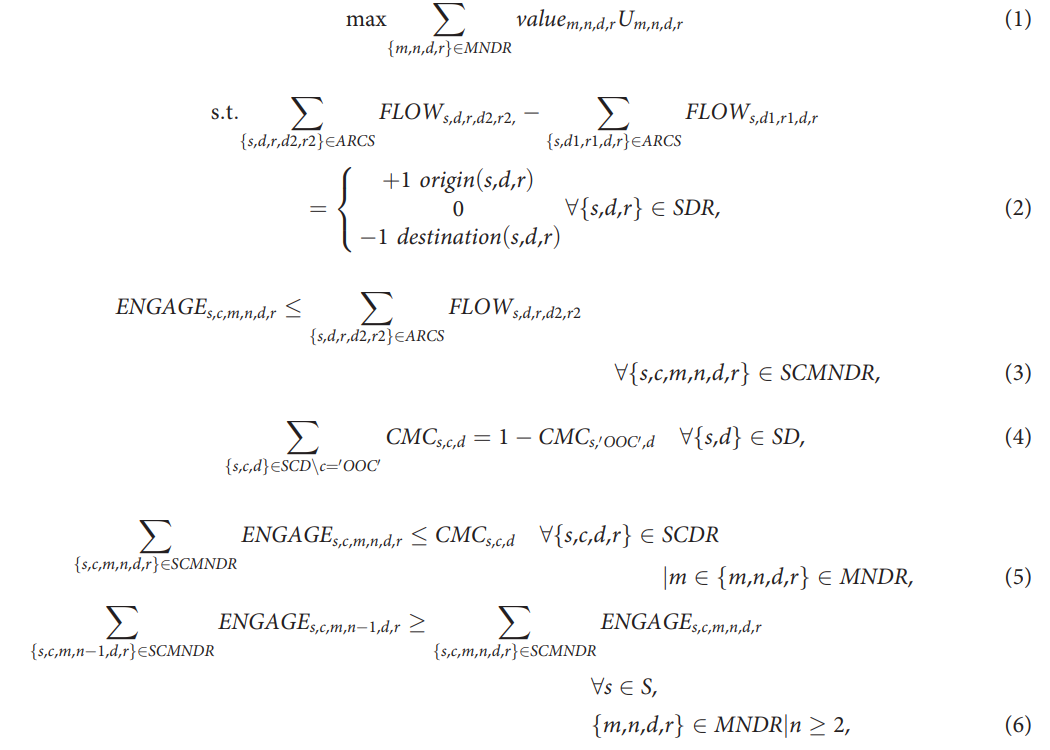
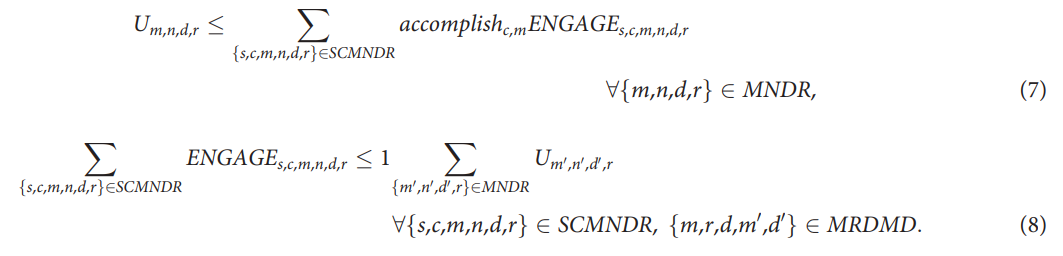
规划问题是为所有舰艇找到一组空间和时间上的同步路径,使预期实现的任务总价值最大化。下面的整数线性规划 "海军后勤任务规划器 "寻求可实现的最佳舰艇部署计划集。它的引入揭示了为使这一问题在保持现实性的同时又具有可操作性而做出的简化假设。通过将后勤需求纳入作战任务规划,我们的目标是实现作战与后勤之间的同步协调规划。
创建了一个部署定向网络流优化模型,为每艘舰船找到一条从其原始区域和日期(节点)到任何地方的路径,无论模型何时发现它不再执行任务。由于我们只知道部署必须结束,但不知道舰船部署的最佳结束时间和地点,因此所有候选结束区域和日期(节点)都通过人工弧线连接到一个结束节点。每一对相邻的日区节点都由一条弧连接。我们为每个船舶出发地添加一个单元的流量供应,在其人工结束节点添加一个单元的流量需求,并要求每个节点的输入流量等于输出流量(要么是一个单元,要么是零)。

图 3:美国海军 DDG112 "迈克尔-墨菲 "号导弹驱逐舰造价 10 亿美元,长 155 米,排水量 9000 吨,舰员约 320 人,其装备和训练可同时执行多种任务。
线性整数部署流程网络公式
额外的后勤和护航编队