
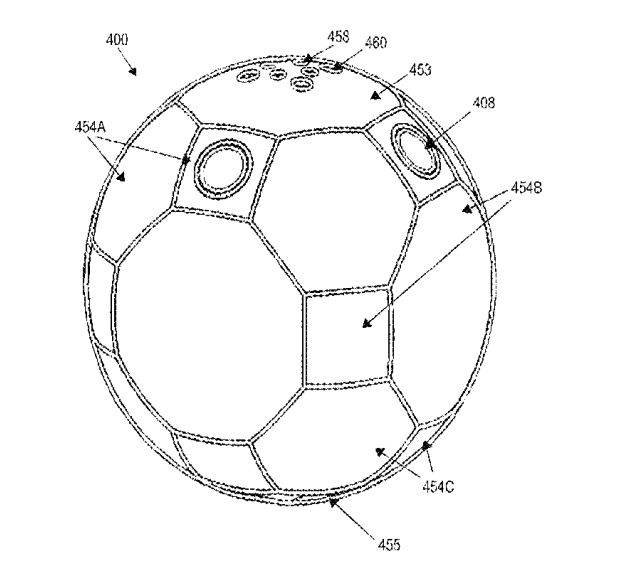
本发明涉及一种自主水下航行器(AUV)。自动潜航器包括框架和隧道推进器,用于推动自动潜航器并使其定向,其中隧道推进器有入口和出口,每个出口的方向不同,并安装在框架上。自动潜航器还包括用于将框架与船体连接的紧固件,其中紧固件的方向与隧道推进器基本平行。船体大致呈球形,并进一步包括:(1) 带有入口开口的底板;(2) 带有出口开口的顶板,其中顶板和底板固定在紧固件上,并将船体的板环固定到位;(3) 每个板环进一步包括相应的固定环和相应的中心板。
成为VIP会员查看完整内容
相关内容


相关VIP内容
相关资讯
相关论文