执行摘要
未来的北约联合部队将纳入自主和半自主的地面、空中和海上平台,以提高部队的实效性和敏捷性。这些自主系统将作为力量倍增器部署在从班到旅的所有战队梯队中。它们将帮助指挥官发展和保持对局势的了解,在更广泛的和人类操作者无法进入的地区提供持久的监视和侦察。蜂群机器人/传感器可以提供一个协作的、多机器人/传感器的系统,提供所需的集群行为,以实现系统能够覆盖这些更大的区域,共享信息,并提供单个系统无法实现的先进行为。
RTG SET-263 "用于情报监视和侦察的蜂群系统"分析了蜂群系统的运用和系统问题,这些问题可以从运用、系统和技术的角度促进它们与当前战场战术系统的整合。这份最终报告为以蜂群为中心的ISR系统(SS4ISR)提供了一个高水平的参考架构,它整合并扩展了SET-263前两年研究的成果。该参考架构同时解决了以下问题:
-
1)运用问题,即片段式描述的相关运用场景、关键能力目标和支持每个目标的一套能力,以及与每个能力相关的SS4ISR作战运用活动。
-
- 系统问题,在SS4ISR提供的关键系统服务方面,支持系统服务的一套系统节点。
-
- 技术,在当前和预期的标准和算法方面,以实现预期的系统能力;和
-
4)在联合/多国联盟中采用蜂群系统的系统级互操作性设计指南,以及它们与传统系统的整合。
该文件还通过一组关系矩阵提供了运用和系统问题之间的主要关系,该矩阵提供了以下映射:
-
1)目标与能力的映射。
-
2)能力与作战活动映射。
-
- 能力与服务映射;以及
-
4)"蜂群系统 "节点与系统节点的关系。
SET-263研究报告涉及以下研究课题:探测和跟踪,分析了采用蜂群系统来探测和跟踪感兴趣的区域;人类与蜂群互动,确定了蜂群与人类操作者之间共生团队的能力和服务;蜂群控制和导航,分析了配置和操作模式,最终目标是解决动态和不确定环境中蜂群必须克服许多挑战,包括快速规划/重新规划和对突发威胁的复原力,这是任务成功的基本要求。机器人与机器人的互动,提供了基于网络中心、自主决策范式的多Agent系统设计,作为机器人和自主系统(RAS)的新兴设计方法;蜂群系统的定位和绘图,解决了蜂群系统采用同步定位和绘图能力的问题;数据交换服务,分析了采用以信息为中心的架构作为蜂群系统数据交换的支持;网络,解决蜂群系统的网络架构和协议。
第1章 - 简介
1.1 描述
1.1.1 背景
未来的北约联合部队将纳入自主和半自主的地面、空中和海上平台,以提高部队的实效性和敏捷性。这些自主系统将作为力量倍增器部署在从班级到旅级的所有战斗梯队中[1]。它们将帮助指挥官发展和保持对局势的了解,在更广泛的地区和人类操作人员无法进入的地区提供持久的监视和侦察[1]。蜂群机器人/传感器可以提供一个协作的、多机器人/传感器的系统,提供所需的集群行为,以实现系统能够覆盖这些更大的区域,共享信息,并提供单个系统无法实现的先进行为[2]。将平台数量从几台、几十台到几百台进行扩展并采用以蜂群为中心的行为能力将提高北约部队的能力:1)在战场上建立并保持优势;2)防止敌人做出有效的反应。北约部队与这些以蜂群为中心的系统的整合,将是实现和保持战术优势和作战效率的关键要求。共生的人类-蜂群团队[3]将使部队能够在不确定的场景和条件下有效地理解、适应、战斗和获胜。
分布式协作自主系统与士兵合作,提供了一种战术抵消战略:一种在复杂的城市和其他领域以高节奏运作的手段,大大降低了风险和士兵数量[4]。将智能系统整合到未来的部队中,将实现以下关键能力:在复杂的地形中提高态势感知能力;面对对手有争议的环境进行弹性作战;增加对峙距离和进入有人系统无法到达的区域;提高作战安全性;在有争议的城市环境、前沿作战基地和车队行动中,通过提高士兵和指挥官对敌人阵型的了解,使他们能够通过常规的远程武器或特定的武装蜂群元素做出早期反应,从而提高指挥官的反应时间。采用以蜂群为中心的行为将进一步提高智能系统的实效性,因为它允许大量的系统以协调的方式工作和移动,并减少通信和控制要求。它还将使大量的系统能够以分散的方式运作,然后集中在特定区域,以压倒潜在的威胁。智能系统和蜂群能力的整合将扩大北约部队的行动时间和空间,提高机动性和在反介入/区域封锁(A2AD)环境中克服障碍的能力,使指挥官有能力承担以前单纯的载人编队所无法想象的行动风险[2]。由于人类暴露在危险中的次数减少,欺骗行动、渗透到敌人防线后面以及开发和追击行动所固有的风险变得更小,给了指挥官更大的选择和更可靠的机动自由[2]。除了这些基于陆军的应用,在港口保护、海上监视发射器定位和反潜战(ASW)监视方面也可以看到这样的场景,在北约层面采用水下或水面无人系统群可以1)以一定的持久性来探测潜艇的过境或存在,2)允许北约国家之间共享跟踪,减少不确定性和接触的损失。这既可以改善北约空间的安全,又可以作为国家的劝阻力量。
1.1.2 目标
机器人和自主系统(RAS)对于确保机动自由和完成任务,并尽可能减少士兵的风险来说越来越重要。在未来的北约联合部队中加入自主和半自主的地面、空中和海上平台群,将提高部队的安全性、有效性和敏捷性。
用于ISR的蜂群系统影响到以下作战能力:
-
收集有关建议行动的持久性ISR数据。
-
部队保护和拦截;以及
-
反进入区域拒止(A2AD)行动。
如下所述,采用蜂群系统会给ISR行动带来附加值:
-
ISR行动的现状:
-
部署具有有限观察能力的实体,提供准静态数据;以及
-
操作员与机器人的控制比例效率低下。
-
-
蜂群系统对ISR行动的附加值:
-
部署人工智能驱动的蜂群系统,能够:
-
i) 临时、自主观测;
-
ii) 优化的广域覆盖;
-
iii) 动态态势感知。
-
-
动态确定感兴趣的相关目标,以提供及时的交战信息,具有高精度和高保真度。
-
优化的人机互动,以减少操作者的工作量,提高工作效率。
-
使用具有相关机载处理和高性能多传感器套件的未来低SwaP(空间、重量和功率)无人机系统,减少后勤足迹。
-
1.2 范围
本文件描述了用于ISR(SS4ISR)的以蜂群为中心的系统的高层次参考架构。该参考架构涉及:
-作战运用作问题,在以下方面:
-
片段式描述的相关操作场景,见第2章。
-
关键能力目标和支持每个目标的能力集,见第3章。
-
与每个能力相关的SS4ISR操作活动,见第4章。
-
系统问题,在以下方面:
-
由SS4ISR提供的关键系统服务,见第5章。
-
支持系统服务的系统节点和相关组件的集合,见第6章。
-
实现预期系统能力的关键技术和算法,见第7章。
-
系统级的互操作性,见第8章。
-
该文件还规定了一套关系矩阵,规定了关键架构元素之间的以下映射关系:
-
能力目标与能力映射。
-
能力与运营活动映射。
-
能力与服务映射。
-
"蜂群系统 "节点与系统节点的关系。
该文件的组织结构如下:
-
第1章 - 引言,关于该文件的基本信息,以提高其可读性。
-
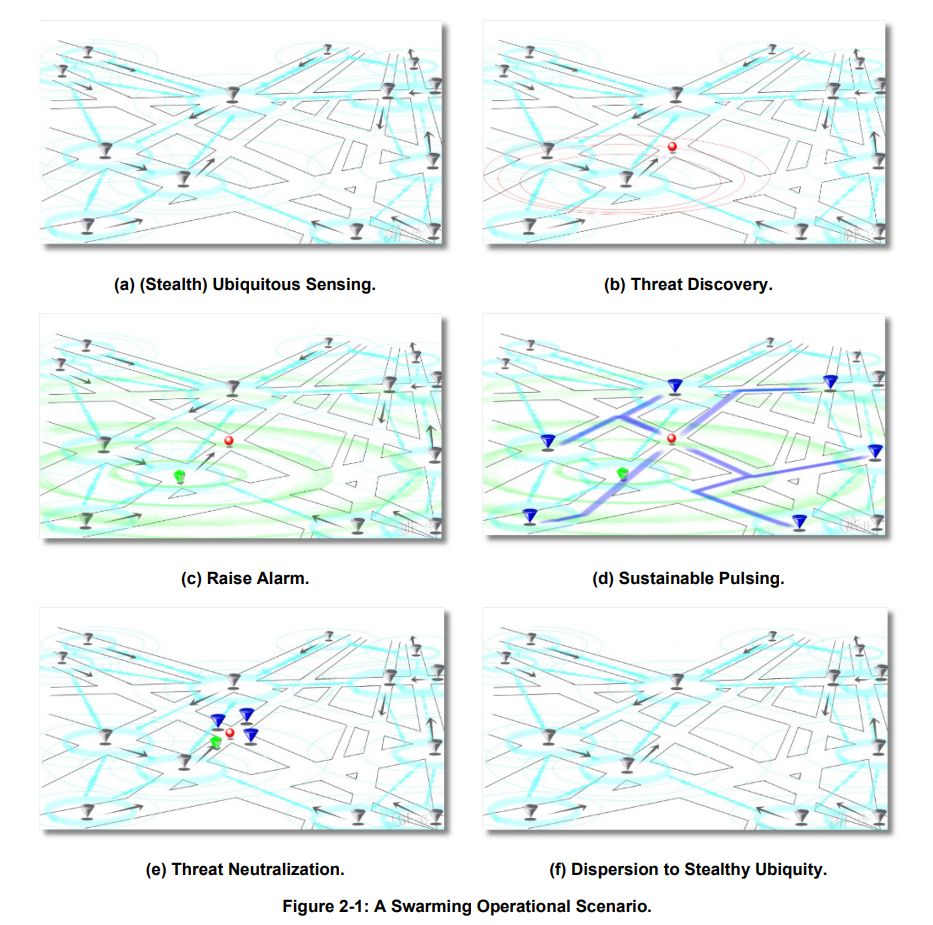
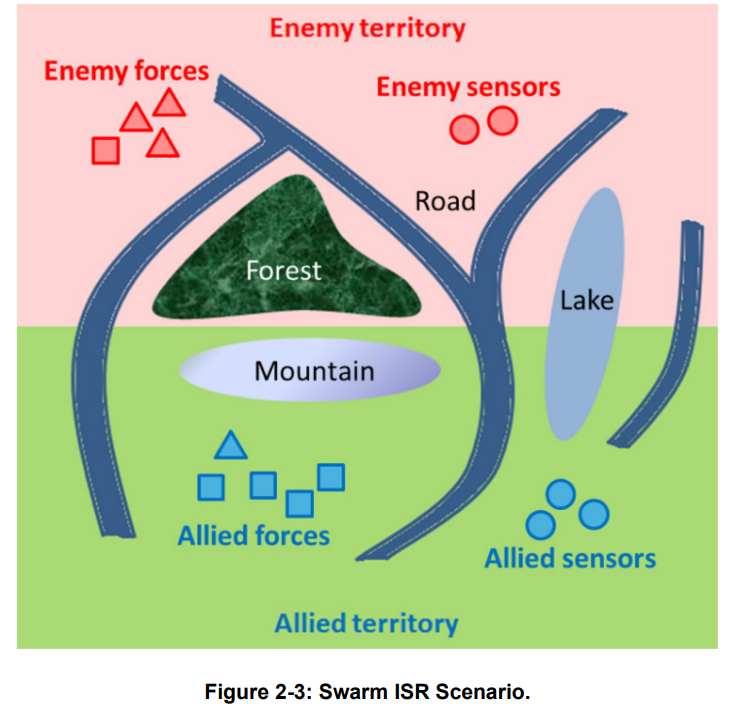
第2章 - 用例小结,通过小结描述一组相关的作战运用场景。
-
第3章 - 能力,描述了能力目标和支持这些目标的一系列部队能力。还提供了一个矩阵,定义了能力目标和部队能力之间的关系。
-
第4章 - 业务活动,描述了3.2节中确定的一套能力的关键SS4ISR业务活动。
-
第5章 - 服务视图,描述了系统提供的一系列相关服务。
-
第6章 - 系统视图,描述了实现每个服务的可能设计方案。
-
第7章 - 技术视图,确定一组技术和/或算法,这被认为是某项服务的关键。
-
第8章 - 互操作性,描述了实现系统级互操作性的可能方法,作为蜂群系统适应性和进化发展的基础。
-
第9章 - 关系矩阵,规定了本架构的关键元素之间的映射关系,即能力目标、能力、作战场景、服务和系统节点。
1.3 鉴定
本文件代表可交付的D3:SET-263:RTG SET-263的最终报告。
来自以下组织的SET-263团队成员编辑了本文件:
-
Leonardo SpA, ITA.
-
Aselsan, tur.
-
挪威国防研究机构(FFI),NOR。
-
美国海军空战中心,武器部(NAWCWD),美国。
-
美国国家海洋情报集成办公室(NMIO),美国。
来自以下组织的SET-263小组成员修改了该文件:
-
美国海军水下作战中心(NUWC)分部。
-
美国防物资组织(DMO),NLD。