
本文介绍了可用于协同导航系统的导航系统和传感器。为了更好地理解导航系统之间的不同特点和优缺点,本文对导航系统进行了总体分类。从导航的角度简要说明了常见导航系统的主要理念和区别。还介绍了可与导航系统一起使用的传感器,以及使用这些传感器的原因,以便为用户提供广泛的导航可能性。
根据导航系统的工作原理对其进行分类,可了解它们需要什么,何时性能最佳,何时性能不佳,以及还需要什么来设计更好的导航系统。事实证明,导航系统的分类问题要比表面看起来复杂得多。在互联网上搜索几下就会发现,人们对导航这样一个简单词汇的理解很快就会大相径庭。然后,每个人都会开始将他们所知道的导航系统分为几类。这就形成了对该领域的单一视角,而且随着新系统的发现,还需要新的分类。面对这些困难,在 2002 年编写一本简单的导航手册时,根据导航系统所使用的信息来源,将其分为三类。它们是
- 数据库匹配技术
- 外部依赖系统
- 惯性推算系统
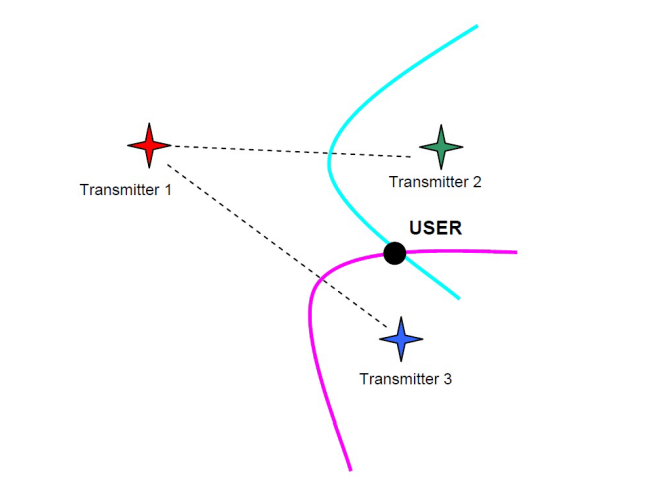
图 1:Loran-C 用户位置位于双曲线位置线的交叉点,双曲线位置线是由一对发射站(1&2 和 1&3)的脉冲到达时间差产生的。
成为VIP会员查看完整内容
相关内容

Arxiv
86+阅读 · 2023年4月4日
Arxiv
152+阅读 · 2023年3月29日
相关VIP内容
相关资讯