
题目: Cooperative Reasoning on Knowledge Graph and Corpus: A Multi-agentReinforcement Learning Approach
摘要:
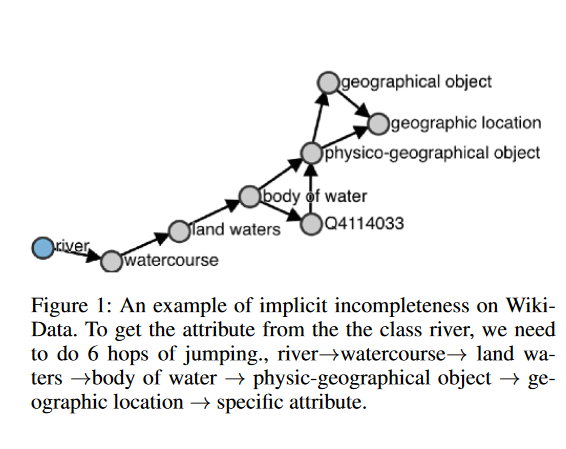
基于知识图谱的推理因其可解释性而备受关注。然而,以往的方法都存在知识图谱不完整的问题,即知识图谱中可能缺失的感兴趣的环节或实体(显式缺失)。而且,以前的大多数模型都假定目标和源实体之间的距离很短,这在真实的KG(如Freebase)上是不正确的(隐式丢失)。对KG的不完全性的敏感性和实体间的远程链接捕获能力限制了这些模型在大KG上的性能。在这篇论文中,我们提出了一个利用文本语料库来弥补这些缺陷的模型,无论是显性的还是隐性的缺失。我们将问答问题建模为知识图谱推理智能体和信息抽取智能体之间的合作任务。每个智能体学习完成自己的任务的技能,在KG上跳跃或从语料库中选择知识,通过正确回答问题获得最大的奖励。推理智能体决定如何为给定的实体和关系找到一个等价的路径。该提取智能体为远程目标实体提供了捷径,或为与来自该发送智能体的消息的显式缺失链接提供了缺失关系。通过这种合作的奖励设计,我们的模型可以在不引入过多不必要的噪声的同时,有策略地增大不完全KG,从而增大搜索空间,降低性能。
作者简介:
翟成祥,美国伊利诺伊大学香槟分校(UIUC)计算机系教授,Willett Faculty Scholar,并在该校的生物信息研究所,信息科学学院,及统计系任兼职教授。于1990年、2002年分别获得南京大学计算机博士学位和卡耐基梅隆大学语言和信息技术博士学位。他的研究兴趣是智能信息系统的一般领域,包括信息检索、数据挖掘、自然语言处理、机器学习及其在生物医学信息学和智能教育系统等领域的应用。
成为VIP会员查看完整内容
相关内容

专知会员服务
64+阅读 · 2020年1月11日
专知会员服务
60+阅读 · 2019年11月25日
专知会员服务
85+阅读 · 2019年11月24日
专知会员服务
74+阅读 · 2019年11月20日
Arxiv
10+阅读 · 2020年3月12日
Arxiv
3+阅读 · 2019年1月31日
Arxiv
9+阅读 · 2018年5月31日


相关VIP内容
专知会员服务
64+阅读 · 2020年1月11日
专知会员服务
60+阅读 · 2019年11月25日
专知会员服务
85+阅读 · 2019年11月24日
专知会员服务
74+阅读 · 2019年11月20日
相关资讯
相关论文
Arxiv
10+阅读 · 2020年3月12日
Arxiv
3+阅读 · 2019年1月31日
Arxiv
9+阅读 · 2018年5月31日