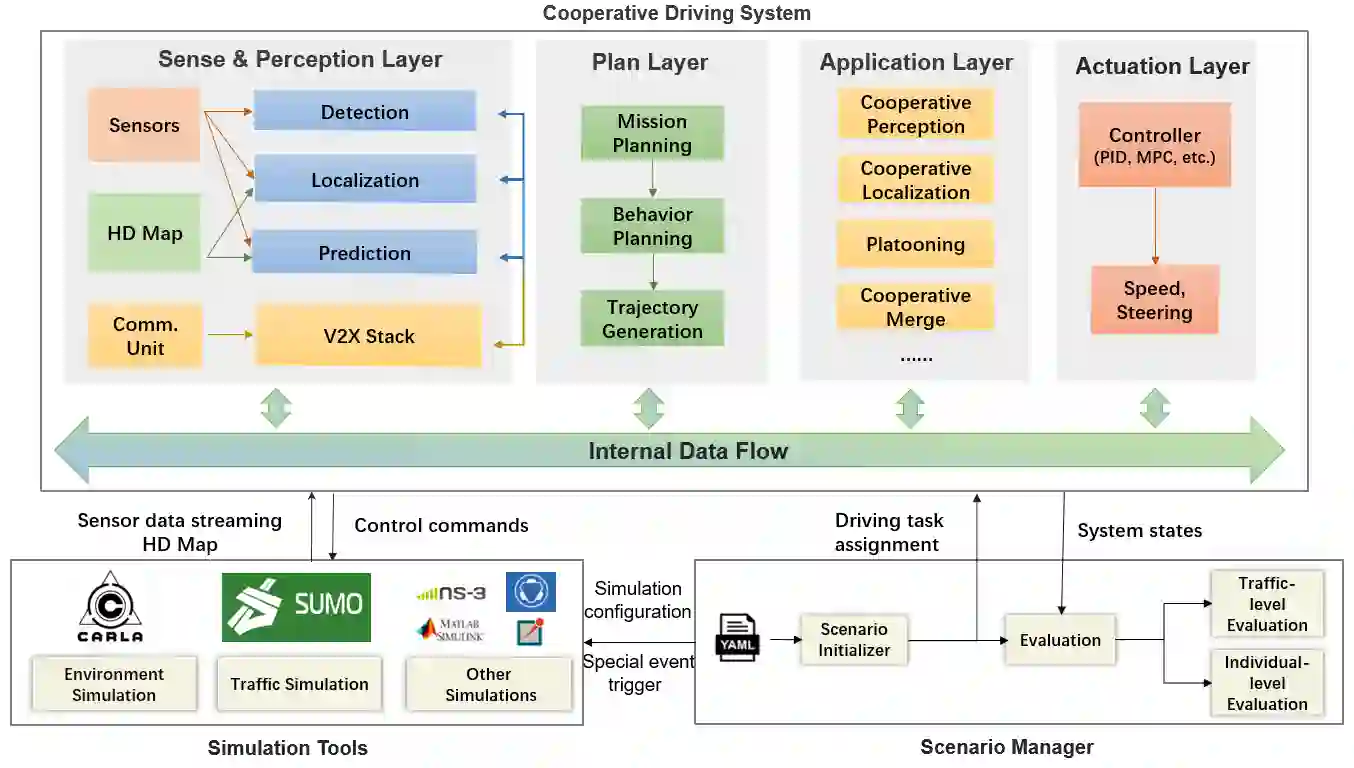
Although Cooperative Driving Automation (CDA) has attracted considerable attention in recent years, there remain numerous open challenges in this field. The gap between existing simulation platforms that mainly concentrate on single-vehicle intelligence and CDA development is one of the critical barriers, as it inhibits researchers from validating and comparing different CDA algorithms conveniently. To this end, we propose OpenCDA, a generalized framework and tool for developing and testing CDA systems. Specifically, OpenCDA is composed of three major components: a co-simulation platform with simulators of different purposes and resolutions, a full-stack cooperative driving system, and a scenario manager. Through the interactions of these three components, our framework offers a straightforward way for researchers to test different CDA algorithms at both levels of traffic and individual autonomy. More importantly, OpenCDA is highly modularized and installed with benchmark algorithms and test cases. Users can conveniently replace any default module with customized algorithms and use other default modules of the CDA platform to perform evaluations of the effectiveness of new functionalities in enhancing the overall CDA performance. An example of platooning implementation is used to illustrate the framework's capability for CDA research. The codes of OpenCDA are available in the https://github.com/ucla-mobility/OpenCDA.
翻译:虽然近年来合作驾驶自动化(CDA)吸引了相当多的注意力,但该领域仍存在许多公开的挑战。主要侧重于单车智能和CDA开发的现有模拟平台之间的差距是关键障碍之一,因为它阻碍研究人员方便地验证和比较不同的CDA算法。为此,我们提议OpenCDA,这是开发和测试CDA系统的通用框架和工具。具体地说,OpenCDA由三个主要组成部分组成:一个与不同目的和决议模拟器共同模拟平台,一个全式合作驾驶系统和一个情景管理器。通过这三个组成部分的相互作用,我们的框架为研究人员测试不同的CDA算法提供了直接的方法,在交通和个人自主两个层面测试不同的CDA算法。更重要的是,OpenCDA是高度模块化的,并安装了基准算法和测试案例。用户可以方便地用定制的算法取代任何默认模块,并使用CDA平台的其他默认模块来评估新的功能在加强CDA总体绩效方面的有效性。在ODA/ODCD中排队执行的一个实例是用于展示现有的CDA/ROGA研究能力。