《ScienceRobotics》发布!哈佛大学研发可编程软体机器人,可根据热量进行折叠,为完全不受束缚机器人铺平道路
中关村机器人创新生态研讨会
中关村机器人创新生态研讨会将于9月6日上午九点半在顺义举办,诚邀科技部高技术中心刘进长研究员、北京航空航天大学陈殿生教授、北京理工大学段星光教授、中国农业大学李伟教授、中科院自动化所侯增广研究员,以及珞石机器人、云迹科技、盛开互动等企业高层,围绕工业服务特种机器人重点产业,通过主旨报告、高端沙龙等形式深入分享。
感兴趣的朋友欢迎来交流,中午提供高档自助餐!具体报名请参看文末海报。
导读
如今,大多数软体机器人都是依赖外部电源来控制,这样它们就必须依赖外接系统来完成相应的动作。近日,哈佛大学Wyss研究所在《Science Robotics》上发表了一篇论文,展示了其受折纸启发,通过3D打印技术完成的可编程软体机器人,为打造完全不受束缚的软体机器人铺平了道路。
编辑:小木
简单来讲,这款机器人是将活性材料整合到3D打印物体中,这里他们使用的活性物质是被称之为液晶弹性体的材料,这种材料在暴露于高温时会改变形状。
研究人员结合折纸工艺,在需要折叠的部分3D打印出两种不同类型的软铰链,这些铰链折叠的响应温度或速度不同,这样就可以通过编码来控制软体机器人的折叠顺序,以达到控制其运动形式的效果。
比如,他们利用这种工艺,制作出一个五角形轮,轮子可以在有温度的平板上完成自动折叠,并向前滚动的动作,并给他起名为Rollbot。
在没有变形前,它是一个大约8厘米长、4厘米宽的平板。当放置在热表面上时它首先会卷曲成五角形轮。

卷曲之后,嵌入在轮子五个面上的每个侧面上的铰链在与热表面接触时也会发生折叠,这样就会推着车轮转向下一侧。当该侧离开热表面时,铰链会恢复原状,为下一个循环做好准备。

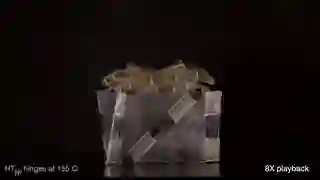
此外,他们还设计了一款可以自动折叠的正方体。正方体顶部铰链的响应温度为100摄氏度,当温度升高至100摄氏度时,顶层的铰链率先向内折叠。

当温度继续升高至150摄氏度时,下层铰链达到响应温度,开始向内折叠。这便是哈佛大学所说的通过编程来控制软体机器人的运动。
还有一种类似于回形针的结构。当把材料放置在热环境中时,铰链可以通过先后折叠顺序,折叠成紧凑的回形针。当环境冷却时,回形针还可以展开。

“使用铰链可以更轻松地编程机器人功能并控制机器人如何改变形状。而不是让软机器人的整个身体以难以预测的方式变形,你只需要编程你的结构的一些小区域如何响应温度的变化,“和该论文的共同第一作者Connor McMahan如是说。
虽然目前这项研究只关注温度响应。但是据介绍这种液晶弹性体也可以编程以响应光、pH、湿度和其他外部刺激。
该论文的一个作者表示,这项工作证明了通过改变复合材料中的响应聚合物的组合可以导致材料对不同的刺激完成自驱动响应。将来,这些材料还可以被编程执行更复杂的任务,模糊材料和机器人之间的关系。
本文源引自《Science Robotics》最新一期期刊,文章链接为:
https://robotics.sciencemag.org/content/4/33/eaax7044
END

招聘内容编辑
为更好的服务于广大粉丝,提供更优质全面的机器人行业内容,现机器人大讲堂面向粉丝招聘内容编辑一职,具体要求如下:
工作内容:
关注机器人领域前沿科技、行业动态和热点事件,负责机器人大讲堂原创内容生产、热点事件深度报道、行业专家企业家深度采访等。
岗位要求:
1、有工科背景或从事工科编辑背景,机器人方向优先;
2、文字功底较好,有新媒体编辑思维,具有一定语的翻译能力,对视频剪辑有一定的基础;
3、具有创业精神和责任心,沟通能力强,踏实肯干;
4、如应届生需毕业于知名重点大学。
薪酬待遇:
不低于行业标准的薪酬福利
五险一金+补贴
与国内外一线大咖、行业翘楚面对面交流的机会
简历投递:
投递邮箱:670749331@qq.com
联系电话:1560008967
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!

看累了吗?戳一下“在看”支持我们吧!





