伯克利新研究:让深度强化学习不再一条道走到黑 | Paper+Code
问耕 编译自 BAIR Blog
量子位 出品 | 公众号 QbitAI
来自加州大学伯克利分校的博士生唐浩然(Haoran Tang)和Tuomas Haarnoja今天发表博客文章,介绍了他们的一项新研究。原标题《通过最大熵深度强化学习掌握不同的技能》,以下是文章的主要内容。
标准的深度强化学习,旨在掌握单一方法来解决给定的任务。但只有一种解决方案是不够的,因为智能体很容易受到现实世界中常见环境变化的影响。
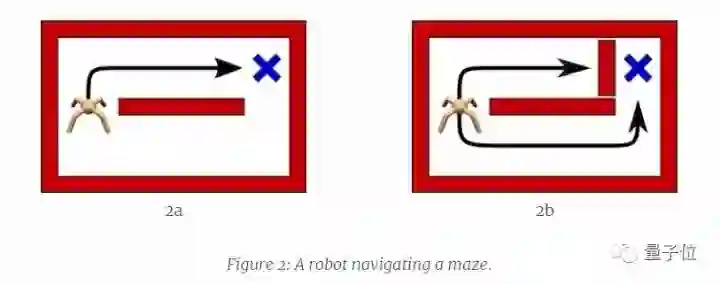
例如,一个在简单迷宫中寻找目标的机器人,在训练的时候,智能体学会了从上部通道找到目标的方法,因为这个距离较短。然而之后如果我们堵住上部通道,智能体发现原来掌握的技能不可行,但不知道还可以选择下部通道。最后只能重新训练智能体。
继续以上述智能体为例。智能体反复观察当前状态(s),采取行动(a),获得奖励(r)。我们将函数Q(s,a)定义为在状态s下执行a行动之后的预期累积奖励。常规的强化学习方法是以指定最大Q值为中心的单峰策略分布,这导致下层通道完全被忽略。

另一种解决方案是确保智能体探索全部状态,同时优先考虑更有希望的状态。如上图右侧所示,这个密度具有玻尔兹曼分布的形式。这个方法让智能体掌握所有的解决方案,以应对某些方案失效的情况。作者证明,通过能量形式定义的政策是最大熵强化学习目标的最优解。

学习这种最大熵模型的思想源自统计建模,其目标是找到具有最高熵的概率分布,同时仍然满足观察统计。在实践中,我们偏爱最大熵模型,因为它们在对观察信息进行匹配的同时,对未知数的估计最少。此前也有不少类似的研究。
我们可以通过Soft Bellman方程来获得最大熵目标的最优解。

此处

不过在连续域上仍有两个主要的挑战。首先,精确的动态规划是不可行的,其次,最优策略是由难以采样的能量分配来定义的。
解决第一个挑战,作者采用了表达神经网络函数近似,对采样状态和动作进行随机梯度下降训练,然后推广到新的状态动作元组。解决第二个挑战,采用了近似推理技术,例如马可夫链蒙特卡洛,并使用Stein变异梯度下降来加速推理。所得到的算法称为soft Q-learning。
通过soft Q-learning来学习最大熵的策略,在实践中表现如何?
作者通过实验证明,这种方法能够更好的进行探索,实现类似任务之间的策略迁移,能从现有策略中轻松组成新策略,并提高稳健性。

这里有个迁移策略的例子。两个对应不同行为的策略,将Q函数叠加在一起,能掌握新的技能。如下图所示,策略1的智能体被训练将圆柱体移动到红色竖纹的位置,策略2测试移动到红色横纹。两个策略叠加,就能让智能体把圆柱移到红点的位置。

关于稳健性作者也给了一个例子。下面这个机器人学会了拼乐高积木,即使期间被干扰,也能成功的把乐高积木拼起来。

上述研究,都在下面这篇论文之中:
Reinforcement Learning with Deep Energy-Based Policies
Haarnoja T., Tang H., Abbeel P., Levine S. ICML 2017.
Paper地址:
https://arxiv.org/abs/1702.08165
另外,相关代码也公布在GitHub上,地址在此:
https://github.com/haarnoja/softqlearning
— 完 —
加入社群
量子位AI社群9群开始招募啦,欢迎对AI感兴趣的同学,加小助手微信qbitbot3入群;
此外,量子位专业细分群(自动驾驶、CV、NLP、机器学习等)正在招募,面向正在从事相关领域的工程师及研究人员。
进群请加小助手微信号qbitbot3,并务必备注相应群的关键词~通过审核后我们将邀请进群。(专业群审核较严,敬请谅解)
诚挚招聘
量子位正在招募编辑/记者,工作地点在北京中关村。期待有才气、有热情的同学加入我们!相关细节,请在量子位公众号(QbitAI)对话界面,回复“招聘”两个字。

量子位 QbitAI
վ'ᴗ' ի 追踪AI技术和产品新动态




