月球车制造指南〡登月 50 年专题


一
百花齐放、激情燃烧时代的月球探险概念车预研项目
其实在 1959 年太空竞赛前夕,美国陆军就启动了「Project Horizon」——地平线项目,研究在月球建立一个可容纳 10 到 20 人的月球军事前哨,该研究报告强调了实现这一目标的紧迫感——美国必须先行,落在苏联后面是灾难性!包括土星 I 火箭的研究迅速启动了,在肯尼迪总统发表了激情洋溢的登月宣言之后,登月工程全面启动。
NASA 在阿拉巴马州亨茨维尔成立了马歇尔太空飞行中心(MSFC,Marshall Space Flight Center),冯•布劳恩成为该中心的第一任主任。启动的研究不仅仅包括土星 5 火箭等载人登月火箭项目,也包括月球移动研究项目,月球车研究及其许多项目参与者集中到马歇尔太空飞行中心,开展的项目有月球后勤系统(LLS)、移动实验室(MOLAB)、月球科学调查模块(LSSM)和移动测试站(MTA)等。这些概念车的设计,基于乐观的人货分离、两枚土星 V 发射的场景,一枚负责将宇航员送达月球表面,另一枚用于携带生命维持和实验设备。不仅仅是汽车巨头,许多参与土星五号各分系统设计和工程的大型航空航天公司也参与到了月球概念车的研究。
(一)格鲁曼飞机工程公司
建造月球车的研究始于 1962 年 9 月,格鲁曼飞机工程公司首先和诺思罗普太空实验室进行了月球后勤系统(Lunar Logistics System,LLS)的研究,成为月球车研发的先驱。1963 年,格鲁曼公司在 Project 344 项目中研制了月球后勤系统(Lunar Logistics System),两轮驱动(轮胎有中国读者熟悉的风火轮造型),能够行驶 300 公里,支持 3.3 天的行程。

在 1965 年至 1966 年,格鲁曼和 NASA 签订合同制造移动测试站(Mobility Test Article,MTA),是开放式测试车辆,没有车身,只有底盘和车轮,但通过性非常好,探险能力更强。
(二)通用汽车公司
作为美国汽车行业的龙头老大,他们在加利福尼亚州圣巴巴拉建立了通用汽车国防研究实验室(General Motors Defense Research Laboratories,GMDRL)。作为该时期陆地行进研究的权威,贝克博士(Mieczyslaw G. Bekker),担任了该实验室负责人;另外一位,塞缪尔∙罗马诺(Samuel Romano)是月球和行星计划的负责人(这位执着的领导,后面会提到,成为整个月球车项目转折的功臣)。1963 年 5 月,Bekker 博士和 Ferenc Pavlics 发表了题为「月球车概念研究」的论文。该论文属于 JPL / NASA 的无人探险车研究项目,规划的月球车总重控制在 182 千克,在月球重约 30kg,采用银镉电池驱动直流电机,轮胎一开始是和固特异合作的特殊橡胶轮胎。但 GMDRL 后续开发了金属丝编织轮,Ferenc Pavlics 和他的团队因此在 1969 年获得了该项专利,成为划时代的设计。

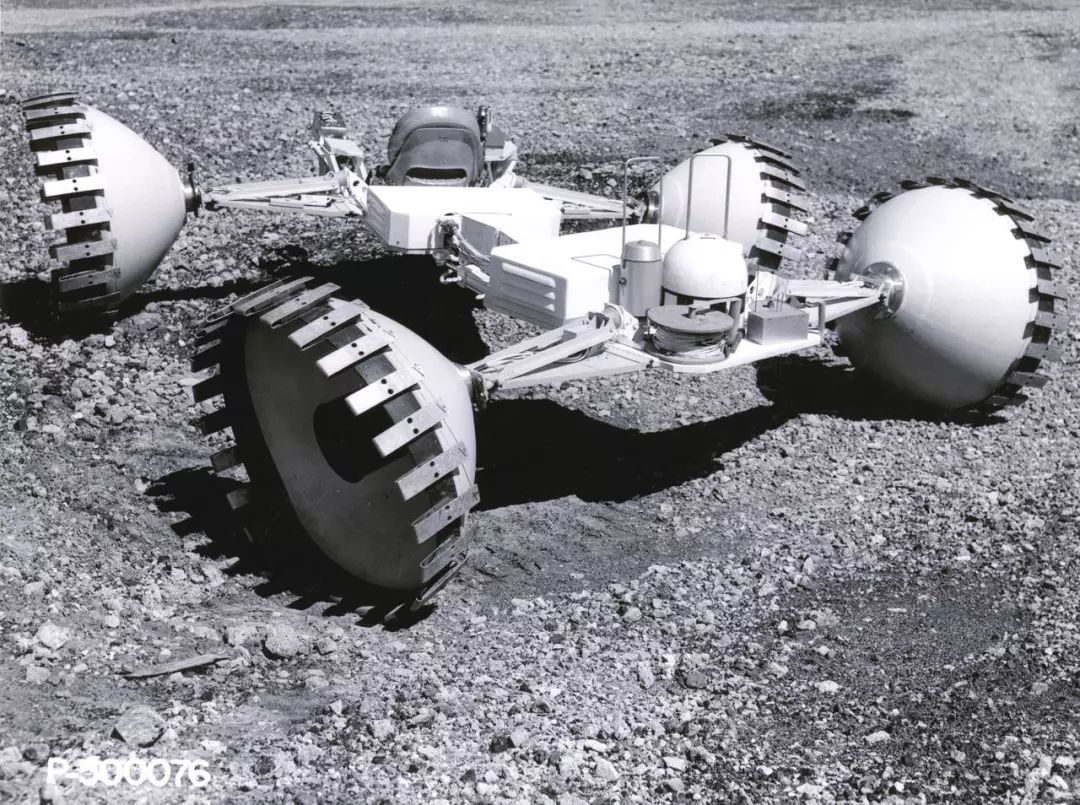
在 1964 年,通用汽车完成移动实验室(MOLAB)方案,该方案为 4X4 轮式加压舱式的设计,提供两周、行驶 400 公里的探索任务。车轮比履带方案更好,因为耗能少,更简单并且对极端温度不敏感等优点,美国地址勘探局在新墨西哥州的沙漠中利用 MOLAB 研究月球探测的勘探程序和设备。

(三)两位后起之秀波音和 BENDIX
波音如雷贯耳,不细讲了,他与通用汽车一起合作开展月球车项目竞标。另外还有一家承包商,叫做本迪克斯(BENDIX),名不见经传,仅仅存在了 60 年,是美国众多高科技企业中的沧海一粟,但其研发能力也不可小觑,土星 5 火箭的惯导平台(型号为 ST-124-M3)制造就出自他家,从 60 年代初期就自筹资金,积极参与月球车的项目,他把月球车立为公司长远发展项目。

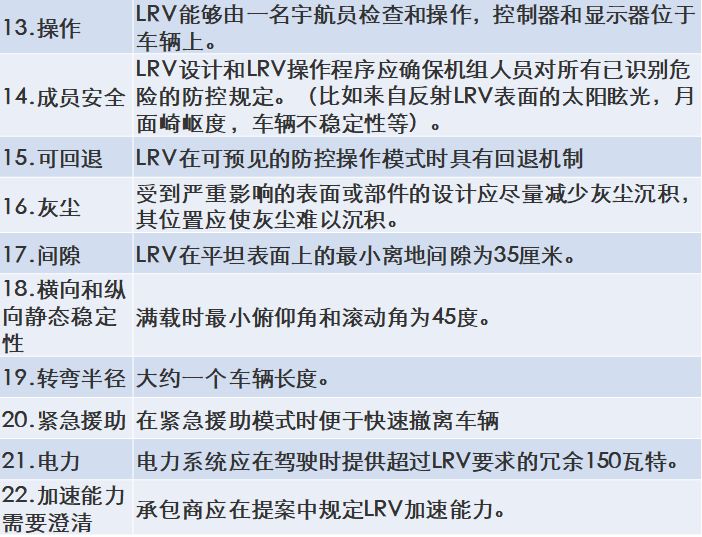
1964 年 3 月,马歇尔太空飞行中心启动 MOLAB(移动实验室)的车辆设计招标,这是阿波罗物流支持系统(ALSS)的一部分,要求加压舱设计,在月球上提供两名宇航员 14 天的任务需求。1964 年 6 月,Bendix,波音,克莱斯勒,通用电气和格鲁曼公司均参与了竞标,最后波音公司(GMDRL 作为车辆技术分包商)和 Bendix 获得了合同。波音公司的方案,核心是使用编织线轮和电机独立驱动每个车轮(这就是刚才提到的 GMDRL 开发的技术),液氢/液氧燃料电池提供动力,这给 NASA 留下了深刻的印象。
(四)月球吉普车——冯•布劳恩的理性推崇
相对理性的冯•布劳恩 1964 年 2 月在为「大众科学」杂志撰写《冯博士讲述如何在月球上旅行》的科普文中,阐述了他的观点:对于短距离旅行,一辆不加压的「月亮吉普车」可能就足够了。宇航员跳上车,依靠加压太空服来保护,由背包提供生命支持。研制轻便的月球漫游车(The Lunar Roving Vehicle,LRV),而不是笨重的加压车的观点影响着阿波罗项目研究的方向。
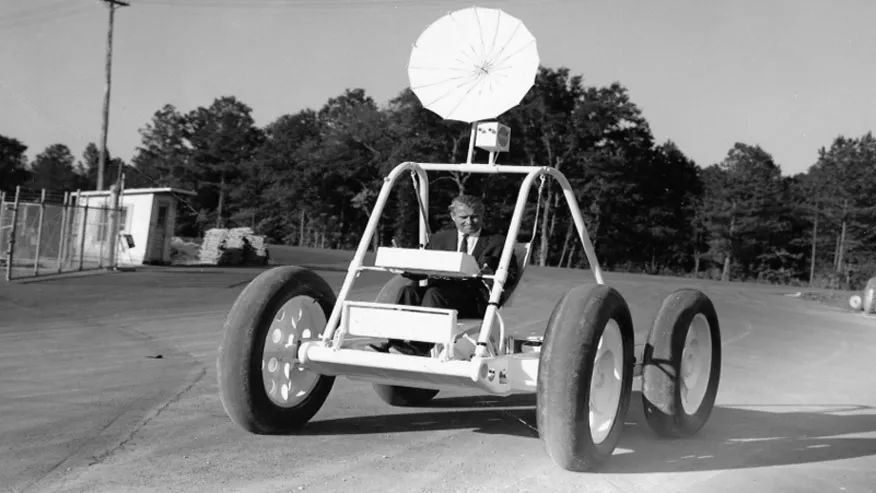
身体力行的冯博士还试乘试驾 Brown Engineering 公司研制的月球吉普车,该车设计用于携带两名宇航员和一些物品,宇航员将着宇航服和个人生命支持系统(PLSS)驾驶这辆车。铝制车架,车舱裸露,配置的防滚架可在侧翻情况下起到保护作用,由传统电池和充气轮胎提供动力。
另外马歇尔太空飞行中心还研究了可以从地球控制的无人月球车:在地面的模拟器,依靠月球车上传的可视图像遥控月球车,不过数秒时延是遥控驾驶的大问题。这可以说是现代车联网概念的鼻祖。
二
一波三折,差点夭折的月球车项目
科学界,包括参与研究的航空航天公司一直相信阿波罗登月会采用人货分离的双土星 5 火箭发射,雄心勃勃的月球探测设想包括在月球能够打洞 3 米的钻机,宇航员可以驾驶月球飞行器(LFV)在月面飞行,或者驾驶项目成本达到 25 亿美元的加压月球车。
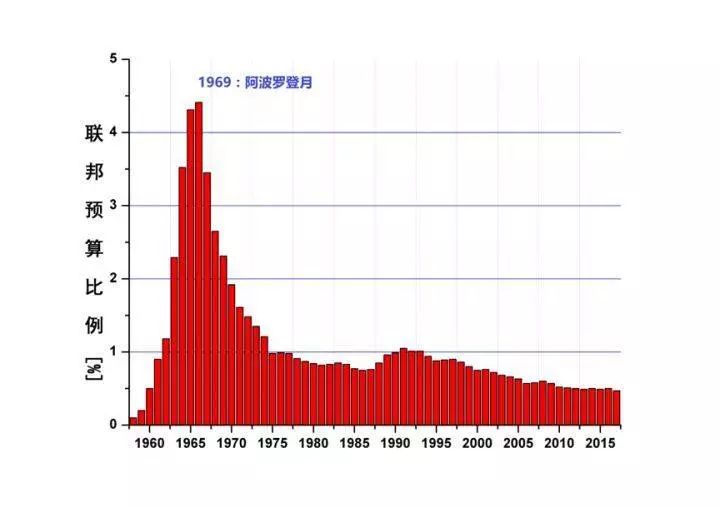
理想是美好的,现实是骨感的,虽然在 1966 年阿波罗登月项目占到了联邦预算的近 4.5%,但从 1967 年之后,阿波罗项目的预算迅速下降,经济现实决定了每次阿波罗任务都只能用一枚土星五号火箭,一枚土星 5 号火箭的运载能力现实的摆在那里,月球车的想法被搁置了……
前期为之付出无数心血的承包商、研究单位对于只能使用一枚土星 5 号表示愤怒,但通用汽车公司月球和行星计划的负责人——罗马诺先生并没死心……他试图力挽狂澜,让月球车项目起死回生。
要让一枚土星 5 号就能捎上天,月球车必须尽可能轻便小巧,不再考虑那些奇奇怪怪的加压舱汽车,之前不被人看好的月球漫游车重新进入了他的视线,但究竟要瘦身到多少?1968 年末,他带着几位工程师前往华盛顿,并与负责登月舱的 NASA 项目经理会面,罗马诺想知道可能的月球车可用空间以及重量限制可能是多少?他被告知可以使用登月舱梯子右侧的仪器舱,但车辆重量的上限不能超过 227 公斤(500 磅)。
这位罗马诺,基本上在阿波罗功臣谱上是找不到的,但他的毅力、执行力可以说是航天知行合一的优秀代表。罗马诺在四个月内完成了方案研究,提出了一个适合该仪器舱体积、重量不到 500 磅方案,同时制作了一个 1/ 6 级的月球车模型和一个登月舱模型。
为了说服 NASA 领导,他制作了一部电影,拍摄了月球漫游车折叠并放置在登月舱内。这部电影被带到了马歇尔太空飞行中心,播放给专家布拉德福德(Len Bradford)和他的一些工程师,布拉德福德被震惊:「我们必须向冯•布劳恩博士证明这一点!」
一群人来到马歇尔太空飞行中心 4200 号楼 9 楼,遥控月球漫游车模型开到冯•布劳恩博士办公室门口。布劳恩博士惊呆了,挂断了手头的电话,问道:「你们在这里干什么?」罗马诺娓娓道来,并通过半个小时左右的电影并告诉布劳恩他们是怎么实现的。布劳恩听完,用拳头砸在桌子上说:「我们必须这样做(We must do this)。」
插播:很多项目负责人、工程师经常抱怨:领导不懂技术啊……稀里糊涂的……等等,请记住,一个领导,他虽然有决策权,但要平衡的事情太多,即便布劳恩博士早就支持月球吉普车这个折中的方案,但也必须用他能够迅速可以决断的可行方案来说服。
改进方案马上被执行。1969 年初 NASA 的载人航天飞行办公室正式要求格鲁曼公司进行加强版 J 系列登月舱(J-MISSION,具体为阿波罗 15~17 任务)研究,允许后期更长的任务时间并增加月球漫游车等有效载荷。1969 年 4 月 7 日,冯博士宣布马歇尔太空飞行中心建立一个月球漫游车(Lunar Roving Vehicle,LRV)任务组。
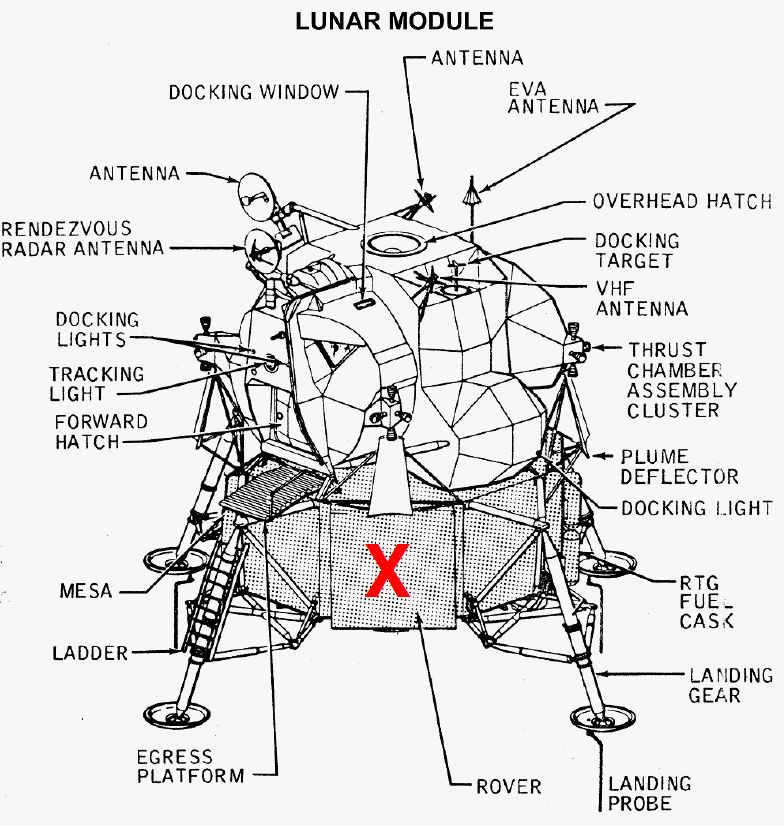
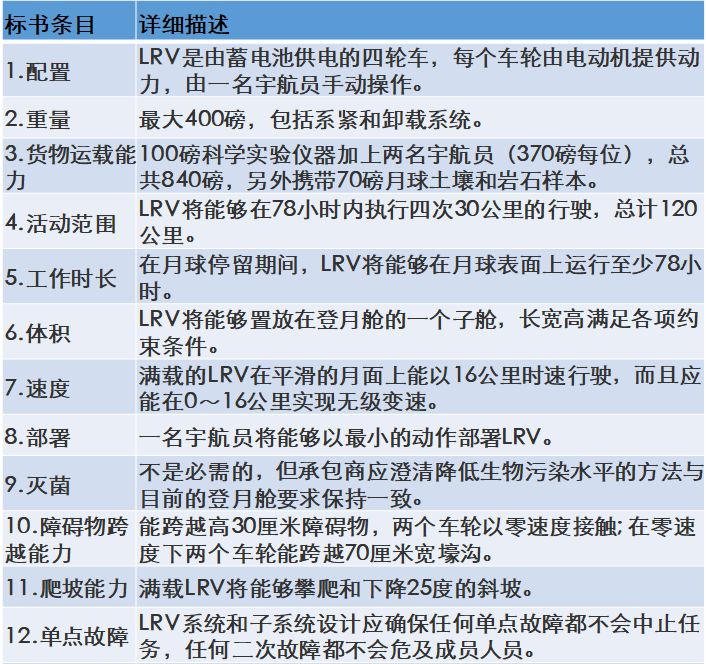
然后,在 1969 年 7 月 11 日,也就是在阿波罗 11 号登月成功之前不久,LRV 任务组根据之前的广泛研究,向 29 个 NASA 承包商发出标书,列出了月球漫游车的 22 项具体要求,分别是:
随着阿姆斯特朗和奥尔德林成功登月以及阿波罗 11 号船员即将返回的兴奋,7 月 23 日在 NASA 米库德装配厂举行了投标人简报会,只有波音公司,本迪克斯公司,格鲁门航空公司和克莱斯勒航天事业部四家公司接受了建造 LRV 的挑战。马歇尔太空飞行中心在 1969 年 10 月 23 日的内部文件中公布了结果,波音(联合通用汽车国防研究实验室)报价 1728 万美元,目标车辆重量为 181.6 千克(399.5 磅),Bendix 报价 2295.7 万美元,目标车辆重量为 180.9 千克(398.0 磅)。考虑包括车辆设计的经验及其可靠性、制造能力、管理团队的经验,在演示和谈判期间的态度以及他们履约能力和时间表,10 月 28 日,马歇尔航天飞行中心正式宣布波音为 LRV 合同的中标者--1,960 万美元(这对本迪克斯来说是一个巨大的打击)。显然,波音是低价中标者,为了保护政府的权益,约束波音在进度、质量、成本控制等方面的工作,正式合同上注明:如果按计划和要求交付第一辆 LRV,波音公司将得到奖励金,不过得要按期提供阿波罗 15~17 号的 3 辆 LRV,才能拿到最高 4000 万美元的预算。否则,顶多在合同原价上加成 1%。
三
生命不息、减重不止——最贵的电动敞篷汽车
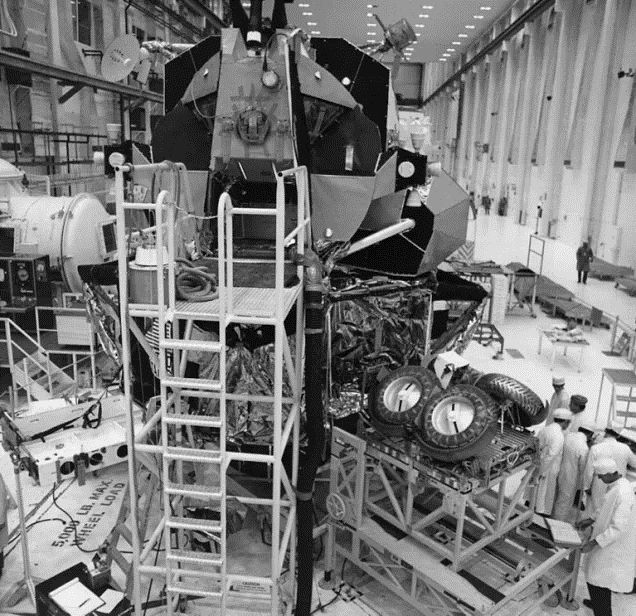
不仅仅是情怀,也为了额外的奖励,好像是被打了鸡血,波音整个团队动员起来,攻坚八个主要分系统,包括移动分系统,电力分系统,导航分系统,通信分系统,热控分系统,机组站分系统,控制和显示分系统以及部署系统。波音公司只有 17 个月用来完成整个研发和制造工作,但最终波音公司不负众望,联合通用汽车国防研究实验室(后来称为 Delco 电子部门)的工程师,顺利完成任务。
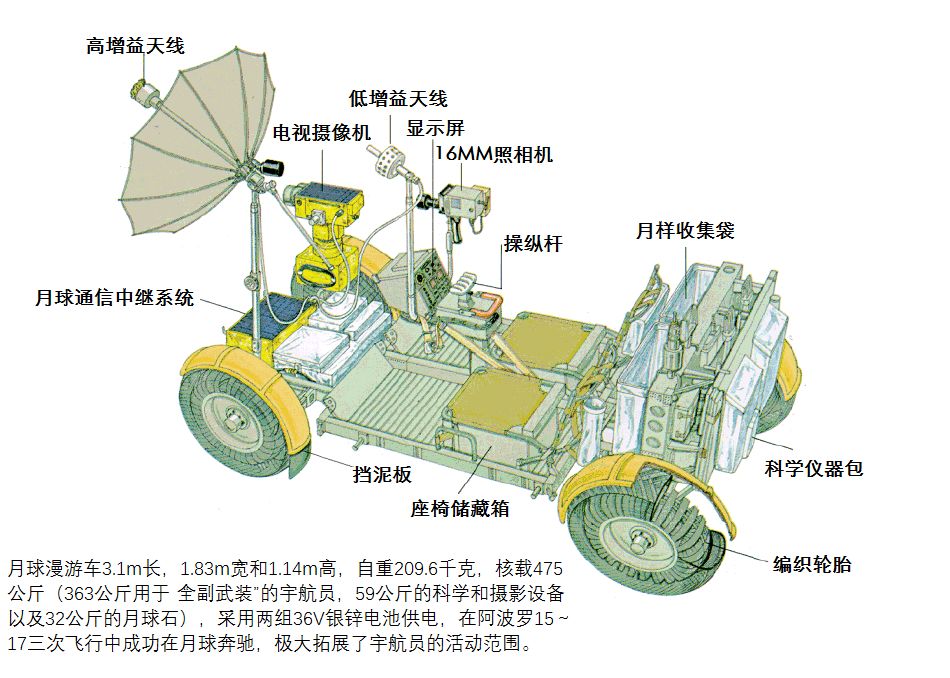
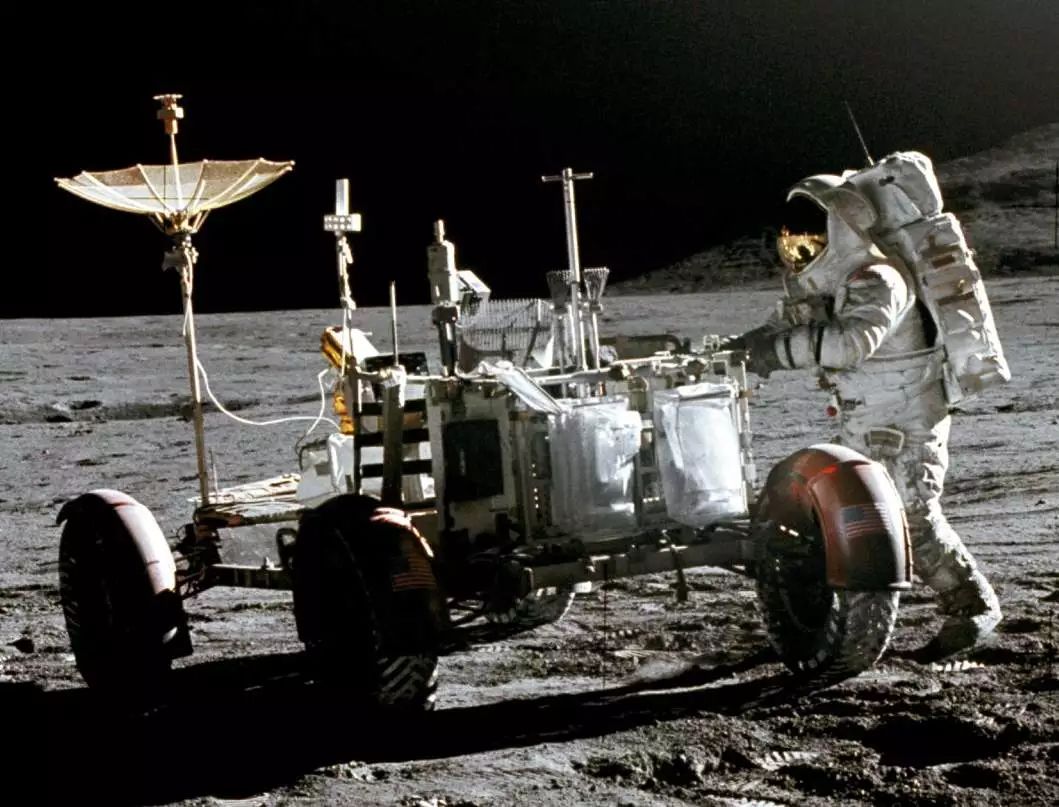
月球漫游车 3.1m 长,1.83m 宽和 1.14m 高,一辆大众甲壳虫的尺寸(轴距略宽,为 2.29 米)。底盘实际上由三部分铰接而成,可折叠;两个并排的座位类似野餐折叠椅,非常简陋,座椅前卫中央控制手柄;车前部为电池、通信和导航系统以及车载电子设备;后部为月样收集袋和科学仪器包,配置有锤子,取样勺,刷子和耙子。车架由 2219 铝合金管焊接制成,其他均为铝,镁等合金,轻巧强壮,设计用于运送 2 名宇航员,以及生命维持装备、科学仪器和收集的月样,可以装载 490 公斤,其中 363 公斤用于「全副武装」的宇航员,59 公斤的科学和摄影设备以及 32 公斤的月球石。满载时 LRV 的离地间隙为 35.6 厘米。
乍一看是一辆简单的车辆,但实际上它很复杂,专为月球环境(温度和地形)而设计,让我们来看看他的设计:
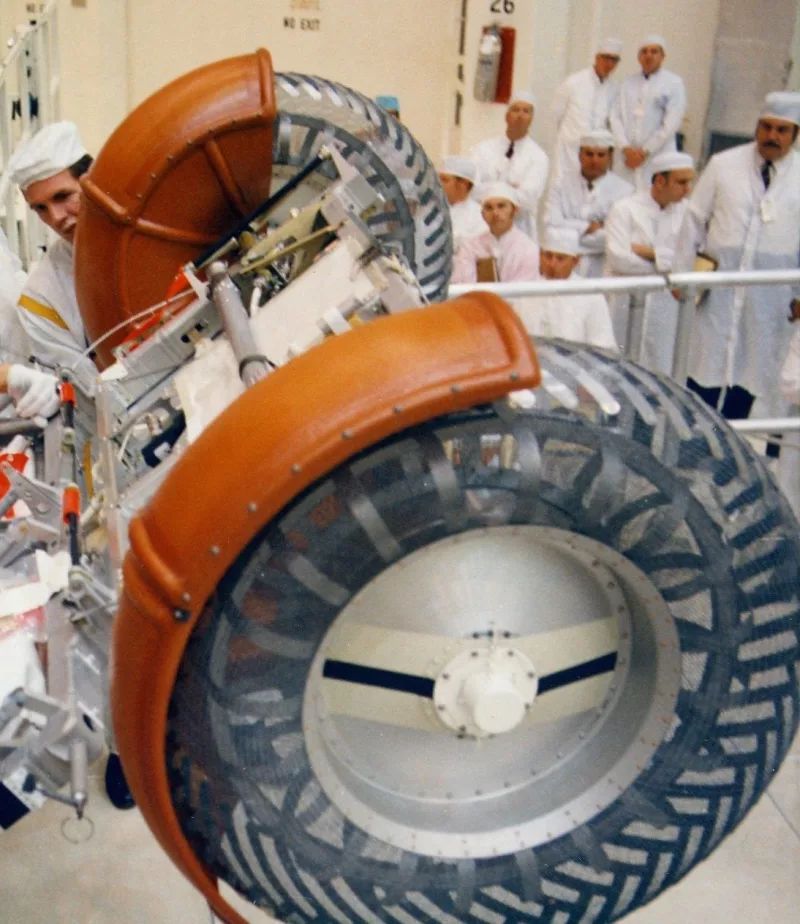
(一)纯手工编织钢丝胎
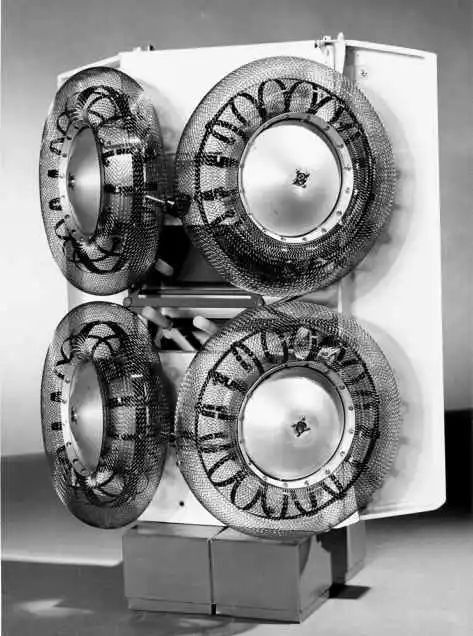
最大的挑战,来自减重,前期马歇尔太空中心通过大量的论证,固特异充气橡胶胎(不耐高温)、格鲁曼的金属扫把轮、风火轮、Bendix 的弹力圈圈轮(太重)都不及通用汽车的金属丝编织轮胎,现在进入「量产」阶段了。
直径为 81.8 厘米,宽度为 22.8 厘米的轮胎内部是一个 2024-T4 铝制轮毂,其外是一个 64.8 厘米直径的缓冲止动框架小「钛金属内胎」,以吸收岩石等大冲撞、保护轮毂,最大可经受 454 公斤的冲击。
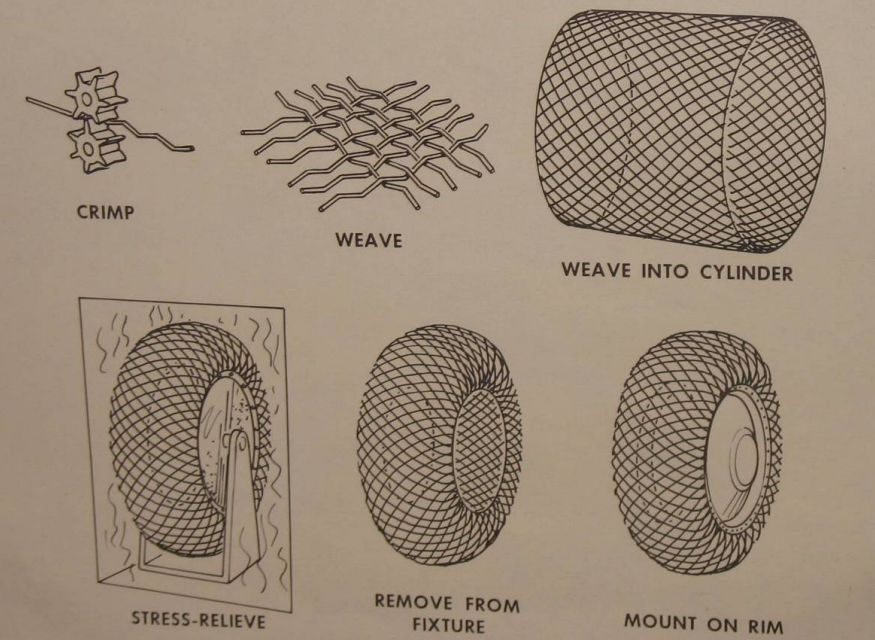
尽管马歇尔中心的天体实验室、空间科学实验室、岩土工程研究实验室对轮胎抓地力等参数采用了数学建模等理论分析,但都是纸上谈兵!阿波罗 11、12 和 14 的带回的月球土壤和岩石样本用来证明才是最令人信服!美国陆军工程师航道实验站对六种版本的波音-通用汽车金属丝编织轮进行了大量测试,使用的是碎石玄武岩,模拟月球土壤,类似于从阿波罗 11 号和 12 号采集的样品,这些测试是在 1-G(地面一个重力加速度)条件下进行的,确认了最合适的钢丝直径和网眼大小,满足刚度和最小嵌入月球土壤岩石要求。编织外胎由 0.083 厘米直径的 800 股镀锌钢丝编织而成,每根钢丝都经过仔细 X 光探伤以避免缺陷。依靠特殊模具纯手工编织,控制波纹间隔为 0.47 厘米;钢丝绳网铆接在铝制轮辋上。该外胎很容易在遇到小障碍物时变形吸能,提供平稳驾驶。

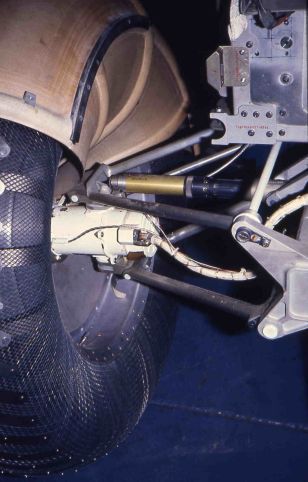
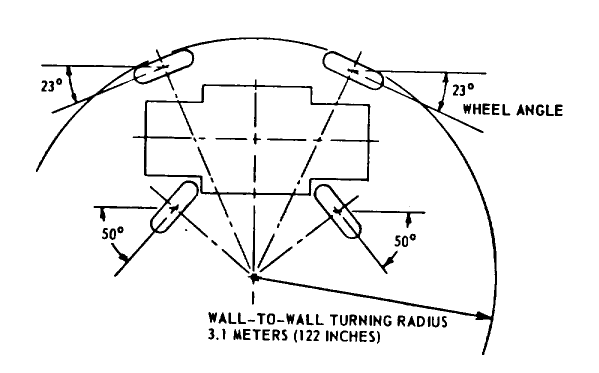
人字形钛条铆接在胎面顶部,覆盖了 50%的接触区域,以获得更好的抓地和牵引力。可攀爬 25 度倾坡并克服高达 1 英尺高的障碍物(不过大家要注意,人字形的尖头可以用来表示行驶方向,这样抓地力最大,但我发现很多拖拉机和山地车的轮胎方向是装反的)。

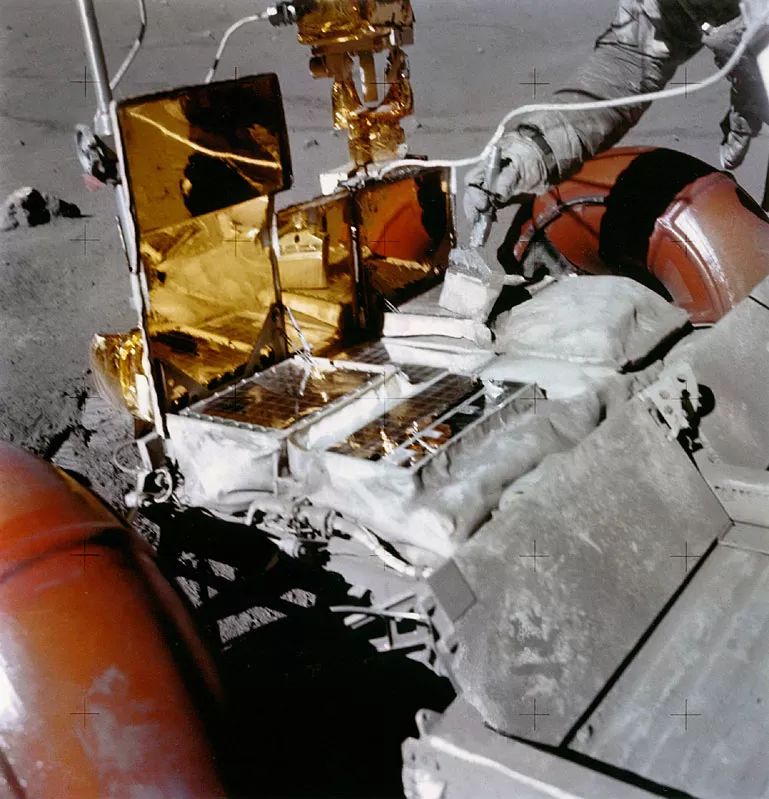
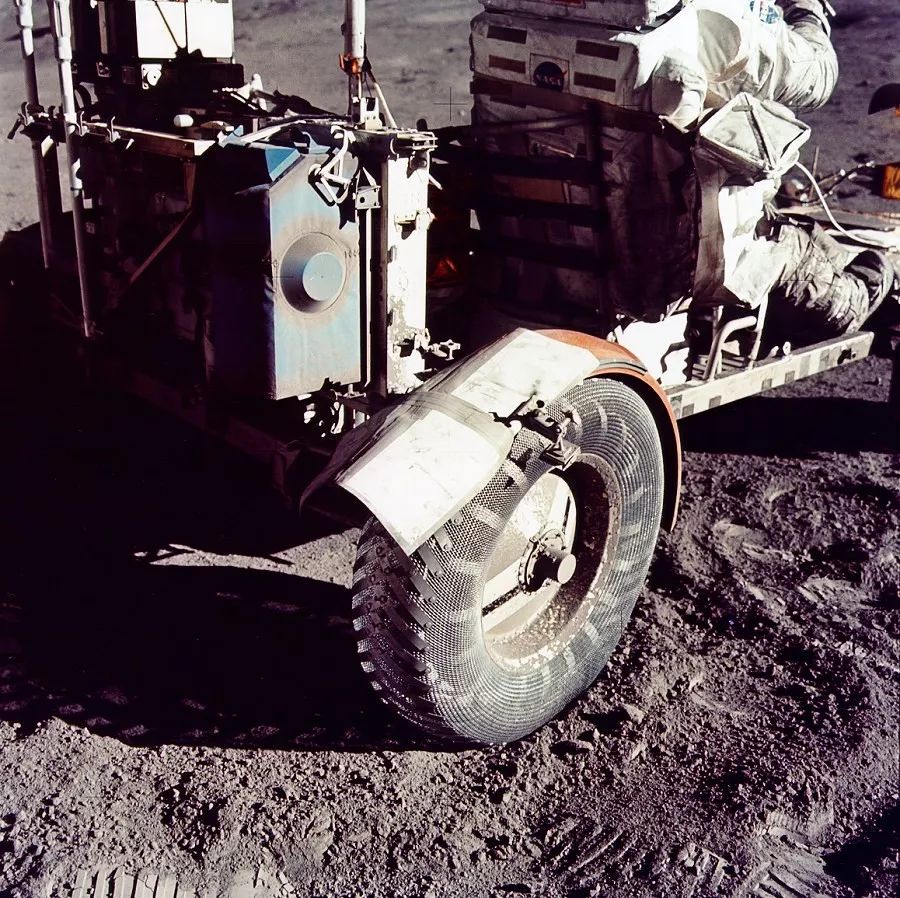
整个轮子,在地球上仅重 5.4 公斤,到了月球上仅为 1/6,大约是 900 克,非常轻巧,尽管在阿波罗 15~17 任务期间经常遇到月球表面粗糙的地形,但轮胎零故障。不过这些金属丝轮最大的问题就是容易进灰,并抛在宇航员身上。在月球,低重力,真空,由于静电,月尘相当的粘人,因此增加了橘黄色玻璃纤维挡泥板,另外宇航员配备了刷子来清洁车载电子设备,包括散热器。
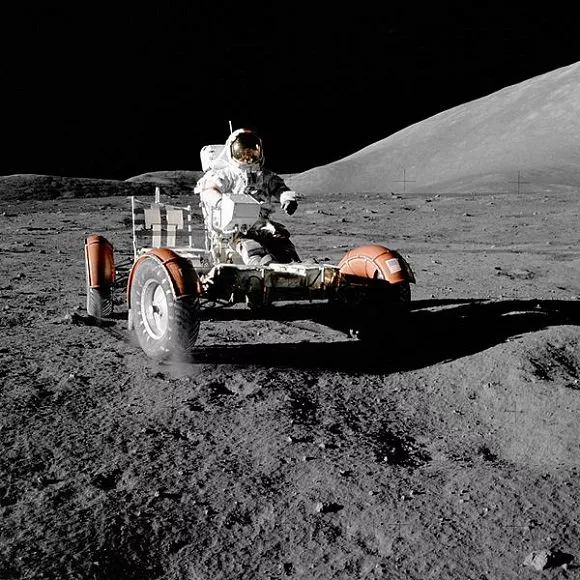
月球车在月表工作实拍,可以清晰看到扬起的月尘
(二)双叉臂式四轮独立悬架——顶配
双叉臂指的是采用 A 字形上下摆臂,外加减震器和转向拉杆实现轮胎的定位、缓冲,(市面普通小轿车一般采用下叉臂上减震筒三点固定的麦弗逊前悬挂)。
独立悬架系统是每个车轮都是单独地通过弹性悬架系统悬架在车架或车身下面的,前后左右车轮单独跳动,互不相干,减少车身倾斜和震动,并提高了车轮的地面附着力,改善汽车的舒适性和行驶稳定性。不过双叉臂独立悬架系统存在着结构复杂、成本高、维修不便,基本只用在高级别的车型上,例如宝马 X5、玛莎拉蒂总裁等,但该技术在月球漫游车上却使用了。
(三)电驱动马达和高科技齿轮减速器
4 个车轮由嵌入轮毂的 4 个刷式直流电机独立驱动,四驱、四轮转向实现更好的自主性和更高的机动性,满足在 3.1 米最小转弯半径,符合标书的要求。
电机功率为 1/4 马力,LRV 的总输出为一马力。电机由两个 36V 银锌非充电电池供电,电池由密苏里州乔普林的 Eagle Picher 设计,把能量密度做到极致,每个 27 千克电池容量为 121 安时,采用轻质镁合金外壳和树脂玻璃芯。在图 16 中,整个电机和减速器、内置机械刹车也就一听可乐大小。
每个牵引驱动装置都非常复杂,对于转速为 10000 转/分的电机进行 80:1 变速传动,要求变速器体积小,重量轻,传动精度高,回差(传动中啮合齿非工作面间的间隙,又称齿隙、间隙、背隙、空回)小,在真空、白天高温的月球上能够正常工作,还要求通过密封壁隔绝月尘,对于上述这些要求,现有的一般传动装置已经满足不了了,新的突破代表就是谐波齿轮传动。
谐波齿轮传动是美国人沃尔特•穆瑟(Walter Musser,意大利裔) 于 1955 年提出的专利,1959 年得到批准。该技术使得旋转部件可以密封,不会受到空间真空和月球尘埃的影响,而且无回差、高紧凑性和轻重量、高减速比、高扭矩能力和同轴输入和输出。行星齿轮产生 10:1 减速比的空间中,谐波齿轮传动可以实现 30:1 至 320 :1 之间的减速比。1960 年他将它授权给马萨诸塞州的联合鞋业机器公司(United Shoe Machinery)制造生产。
谐波齿轮传动由波发生器、柔轮、刚轮三大件组成,结构简单。传统的机械传动是建立在刚体力学基础上的, 即旋转元件为刚性,并绕固定轴作圆周运动。而谐波齿轮传动却是以弹性力学为基础, 靠可控制的柔性元件变形波的移动来实现运动传递、转换或控制机械运动。

但要把它的工作过程说清楚,还真不是那么容易,先从下面这张 GIF 动图说起,蓝色(外圆):刚轮,圆形花键(固定);红色(中间柔性圆):柔轮,连接到输出轴;绿色(内部椭圆形):波发生器(连接到输入轴),由椭圆盘和柔性轴承组成。
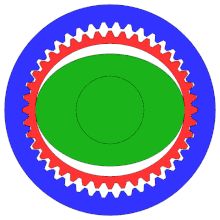
从上图可以看到柔轮比刚轮要少几个齿牙,波发生器的椭圆轮强迫柔轮变形,两端咬合刚轮并旋转,当波发生器绕刚轮走了一周之后,实际上柔轮,磨洋工,基本是原地踏步,还退步了,少走了几个齿牙。对的,我们要的就是这个效果,减速比就出来了,而且非常可观。用视频比较方便看懂一些:
谐波齿轮传动的基本特点是柔轮连续不断的变形,不断的应力循环状态下其工作条件恶劣,所以柔轮是影响谐波齿轮传动装置工作性能的关键零件,长期以来柔轮的变形与疲劳强度一直是谐波齿轮传动领域研究的难点和热点,谐波齿轮传动装置的寿命、可靠性、运动精度等主要受到了柔轮的限制。
联合鞋业机器公司为了阿波罗月球漫游车也是费尽心机,一开始测试的时候,柔轮在仅仅几千转后就发生疲劳和破裂!联合鞋业机器公司和通用汽车的冶金学家合作,提出了各种退火的方法,最终克服了这个难题。正如历史所证明的那样,这套 80:1 的谐波齿轮传动技术在月球上完美运行,后续也在天空实验室(Skylab)中用于部署太阳能电池板的绞车。经过阿波罗计划发扬光大,这种传动的优越性快引起世界各国的重视,并逐渐扩展到民用和一般机械上,目前在机器人领域大量应用。
另外杜邦公司为太空计划开发了科慕(Krytox)的全氟聚醚润滑剂,用作谐波传动齿轮润滑,满足高真空、极端温度和冲击振动、接触燃油和氧化剂的苛刻太空飞行条件。
为防止意外,电机驱动装置还包括一个释放机构,在驱动器发生故障的情况下,可以将电机驱动脱钩并允许轮胎随动,也就是说,最糟糕的情况下,只要还有一个电机驱动器正常,其他三个脱钩,宇航员也能驾车回到登月舱回家。负责转向的电机如果出现故障,相关的轮胎可锁定在中心位置,防止偏移干扰另一套转向系统。
当然,这辆车设计的再高大上,塞不进登月舱的狭小空间也是白搭,下一步就是要看怎么「螺狮壳里做道场」,把这个高级「敞篷车」塞到登月舱里。
四
折叠、折叠、再折叠
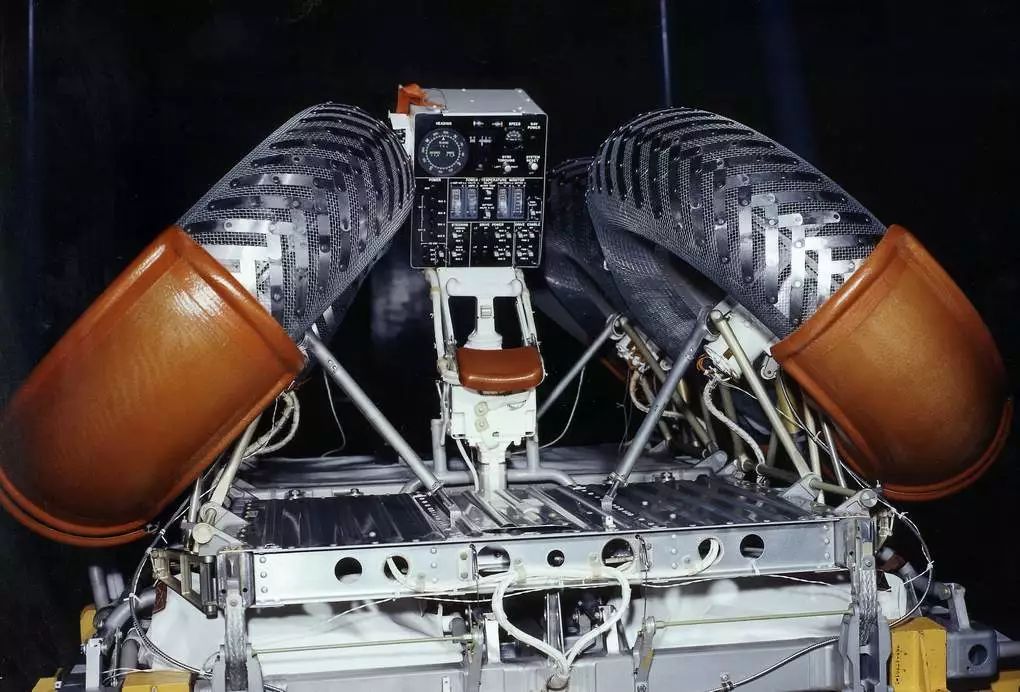
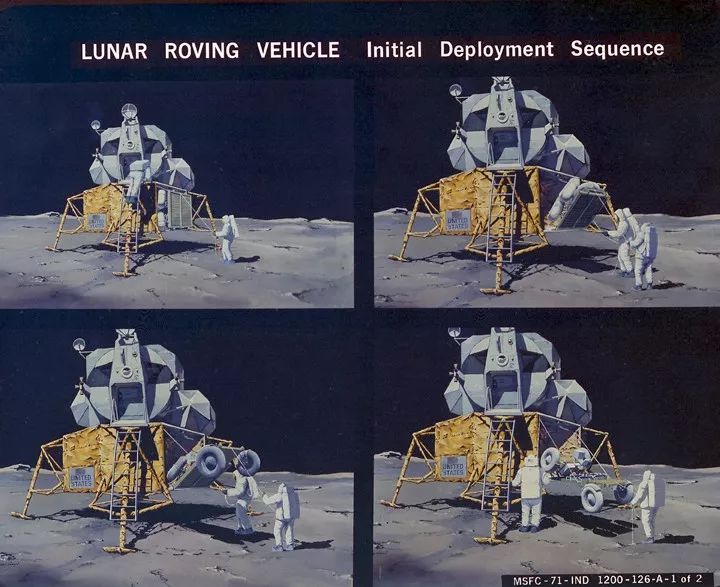
阿波罗 J 款登月舱的仪器分舱体积不大,怎么能够容纳下 LRV 呢?靠的是 LRV 的超级变变变。首先是放倒座椅,然后将前车身折叠,两个前轮八字对折,最后是将后车身折叠,两个后轮八字对折。
至于释放,当登月舱在月球着陆后,宇航员蹦蹦跳跳的下扶梯时拉动释放总开关,然后使用拉绳、滑轮将月球重量仅为「30 千克」的车辆放下,在弹簧驱使下后轮自动打开,翻下后折叠车身,再拉出前车身翻下轮胎并锁定前折叠车身,抬起座椅和脚踏板,大功告成!
五
中控台的人体工学设计和前卫的行车记录仪
为了满足折叠的需要,波音一开始用枪式直把手柄用来替代硕大的方向盘,全电传摒弃了复杂的传动机构,可以控制四个驱动电机、两个转向电机和制动器:推杆前进,拉杆制动(切断驱动电机电源并同时启动机械制动器),左右摆动转向,倒档要激活手柄上的反向开关;完全拉回手柄就是手刹。可以说,波音的侧杆驾驶和全电传技术,比空中客车在 A320 启用的驾驶侧杆早了有 17 年。
不过这也要结合人体工学设计。阿波罗 15-17 任务的太空服被重新设计,腰部可以弯曲,让宇航员可以坐在月球车上,也可以弯腰跪下细致采集月球样本。不过宇航服终究是笨重,枪式直把手柄需要用手腕的运动实现控制,但其实加压、厚重的宇航服让宇航员需要很大的腕力实现加速和制动所需的细微动作,宇航员约翰∙杨(John Young)和查理∙杜克(Charlie Duke)在测试中抱怨手腕很累,只能坚持两三分钟。
波音迅速更改了设计,赶在交付第一辆月球车几个前进行了设计变更,宽大的 T 型手柄适合带上手套的宇航员用手臂操控。
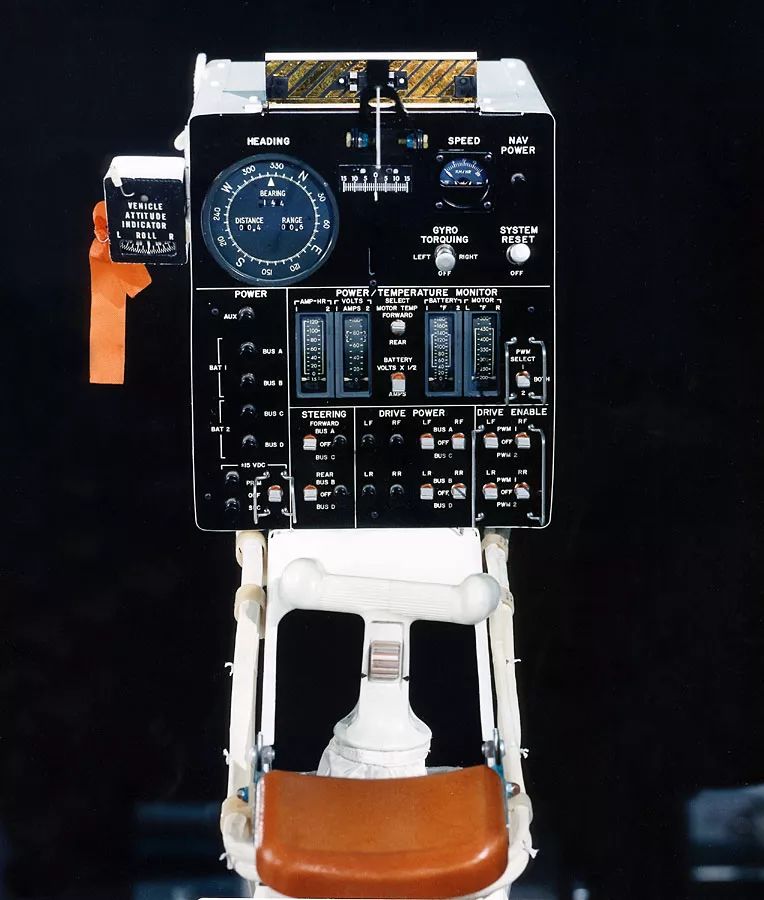
中控台被刷成亚光黑色,防止阳光反射影响驾驶。在 50 年前设计的中控台,基本和现在的豪华汽车可以媲美,因为除了必须的速度、行驶距离、续航电能等常规显示之外,波音公司设计了一套含陀螺仪和行驶距离存储计算功能的导航系统,显示和登月舱的距离和方向;在中控台顶部,还有一个类似日晷的装置,可以根据太阳的方位角,人工判定月球的参考方向,确保导航仪的准确性,防止宇航员在月球走失。

月球漫游车还配备了一台电视摄像机、一台机载 16mm 遥控相机,拍摄画面直达休斯顿,前卫的行车记录仪设计!信号是通过高低增益的 2 个天线回传月球轨道上的 CSM 舱和地球进行通信。
六
必须要有的热控
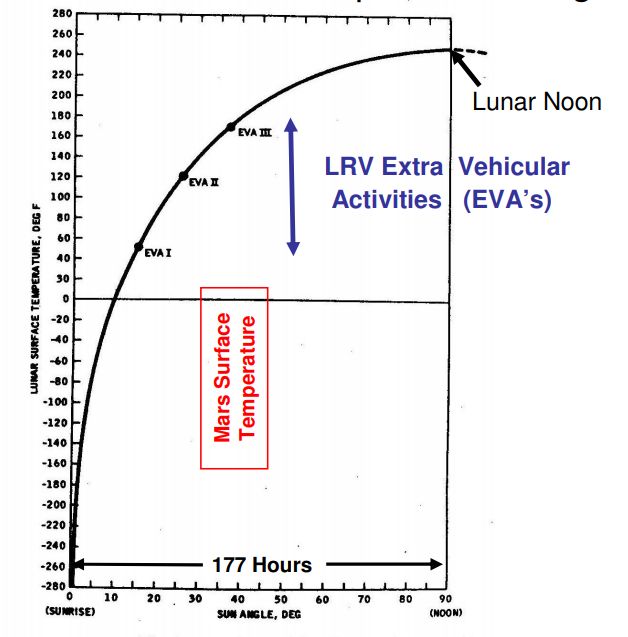
月球上的温差极大,月球的拂晓,温度只有-260 华氏(-112.2°C),到了正午达到 250 华氏(121.1°C)。因此热控分系统(Thermal Control Subsystem,TCS))必不可少,让月球车的各个部件从地球出发直至在月球工作阶段,温度保持在一定范围内。
热控设计方案结合了两个设计,其一是采用被动热控技术,包括多层绝热和低导热率、高辐射组件选型,多层绝热采用了十五层敷铝薄膜,中间有涤纶间隔层。其二,银锌电池、驱动控制电器 (DCE) 、信号处理单元(SPU)、定向陀螺仪单元(DGU)是发热量大户,在阿波罗时代「热管」技术并不成熟,采用封闭式的氨水热管设计虽然全自动,不需要与宇航员手工操作,但由于超重被否决。
替代方案是采用柔性热带将电器产生的热转移到可融性蜡进行储热,这些蜡总重量达到 12.6 千克,其中 7.7 千克蜡在 DCE,4.9 千克在 SPU。蜡熔化时将电子设备 DCE 和 SPU 保持在恒定温度,当停车歇息时,打开防尘罩,融化的蜡通过顶部的空间辐射散热器进行放热,蜡固化以重复使用。当电池温度达到安全的 45 华氏度,双金属弹簧自动关闭防尘罩。
七
交付、验证测试和在月球飞驰
(一)阿波罗计划少有的提前交付项目
汉密尔顿公司花了 60 个月交付第一套宇航服,北美罗克韦尔公司花了 66 个月交付登月服务舱,格鲁曼公司花了 52 个月交付登月舱,大量技术挑战面前,研制进度普遍逾期,差一点让肯尼迪的夙愿落空。
从 1969 年 10 月中标开始,留给波音仅有了 17 个月,然而得益于前期大量的预研工作,以及阿波罗项目最大的项目管理成果——航天系统工程管理,在 1971 年 3 月 15 日交付了第一辆月球漫游车用于阿波罗 15 号任务。但很多科研人员每天工作 16~17 小时,为止牺牲了很多,包括健康、生活、家庭甚至婚姻……
1971 年 4 月 6 日,波音向马歇尔航天飞行中心提交了月球漫游车设计认证审查报告,汇报最终实现情况:
1、略有超重:要求重量为 400 磅(181.9 千克),实际重量为 493.81 磅(223.9 千克)。目标有效载荷能力超过 440 公斤; LRV 的实际有效载荷能力达到了 482 千克,可实现 78 小时的任务能力。
2、行驶能力基本达标:所需的最高时速为 16 公里,实际时速为 14 公里;期望的范围是 120 公里,实际为 92 公里。它达到或超过了坡度、稳定性、跨越裂缝和障碍要求,可跨越 30.5 厘米高的障碍物,71 厘米的裂缝,它可以上下 25°的斜坡,甚至停在 35°的斜坡上。
3、提前交付:要求 1971 年 4 月 1 日交付,实际于 1971 年 3 月 15 日,提前了两周。这和其他累犯拖延证项目可以说是一个奇迹。
波音公司还专门提供了宇航员在地面训练的月球车,重量为 431 千克,由于地面重力加速度和月球的差异,驱动车轮的电机单台达到 1 马力,用充气橡胶轮胎,电池寿命为 1 小时。宇航员穿着厚重的宇航服进行驾驶训练,非常艰辛。


钢丝胎和豪华双叉臂式四轮独立悬架是否真的有效?为了进一步模拟车辆悬挂系统在月球的表现,1971 年 5 月在空军的 KC-135A 飞机上进行了 1/ 6-G 的测试,机组人员进行抛物线飞行,逼真模拟月球重力,研究车轮和悬架的几何形变,以及车轮与月壤模拟物的互动结果,一共进行了 65 次测试。整个验证的结果非常令人满意。

(二)昂贵的打车费用
波音一共造了四辆月球车,分别用于 Apollos 15,16 和 17,最后一辆由于任务取消并用于拆机提供备件。其他还有 7 辆测试用车,一辆用于人体工学设计,一辆用于子系统设计和集成,两辆 1/6 重力模型,用于地面驾驶模拟、与登月舱合练的模型、振动测试用车各一辆。由于按期交付,同时月球漫游车在月球上完成了所有功能,没有出现重大异常情况,除了阿波罗 15 号前轮转向系统失灵这个故障。
波音公司最终结款 3800 万美元,大概为现在的 2 亿美元,相当于现在最贵型号劳斯莱斯汽车的 95 倍。换个角度,三辆月球漫游车一共跑了 90.4 公里,按照现在的美元币值,每公里成本大约要 220 万美元,可以说是最贵的计程车。
阿波罗 16 号,约翰•杨(John Young)开出了 11 公里/小时的最快记录
月球漫游车极大的拓展了宇航员的活动范围,最远跑到了距离登月车 7.6 公里远的地方,带回更多的月岩和土壤标本,加深了对月球演化的理解,这可不是用金钱能够衡量。
另外阿波罗 16~17 号月球漫游车上的摄像机,也拍摄到了珍贵的登月舱上升级离开月球画面。下图为阿波罗 17 号两名宇航员离开月球的刹那,这是阿波罗计划的最后一章。
在这个期待已久的镜头之后,到目前再无世人造访广寒宫。

当时月面起飞的录像,非常珍贵的一段视频
八
起了个大早,赶了个晚集——与第一辆月球车称号失之交臂
冥冥中,老天要平衡一下顺风顺水的阿波罗计划,人类第一辆月球车的桂冠其实是被登月竞赛中磕磕碰碰的苏联摘得。1969 年 2 月和 7 月在两次 N1 火箭失败之后,苏联在载人登月竞赛中落败。但在 1970 年 11 月 10 日,苏联用质子 K 火箭-Block D 上面级发射「月球」-17 号探测器(详见【原创重发】陷入中年危机的俄罗斯上面级火箭(中)——在航天质量日看几起令人匪夷所思的事故),7 天后把第一辆自动月球车「月行者」-1 号,lunokhod 1 送到月球考察,成为了人类历史上第一辆月球车。
而 1971 年 7 月 31 日,阿波罗 15 号宇航员大卫 R∙斯科特(David R. Scott)和詹姆斯 B∙欧文(James B. Irwin),首次驾驶的月球漫游车,只能算是第一辆有人驾驶月球车。
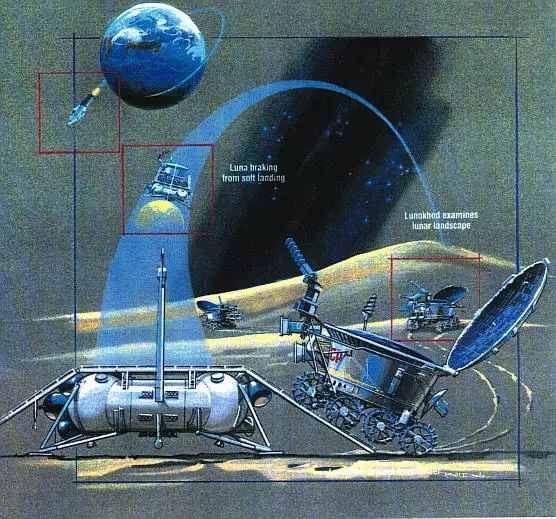
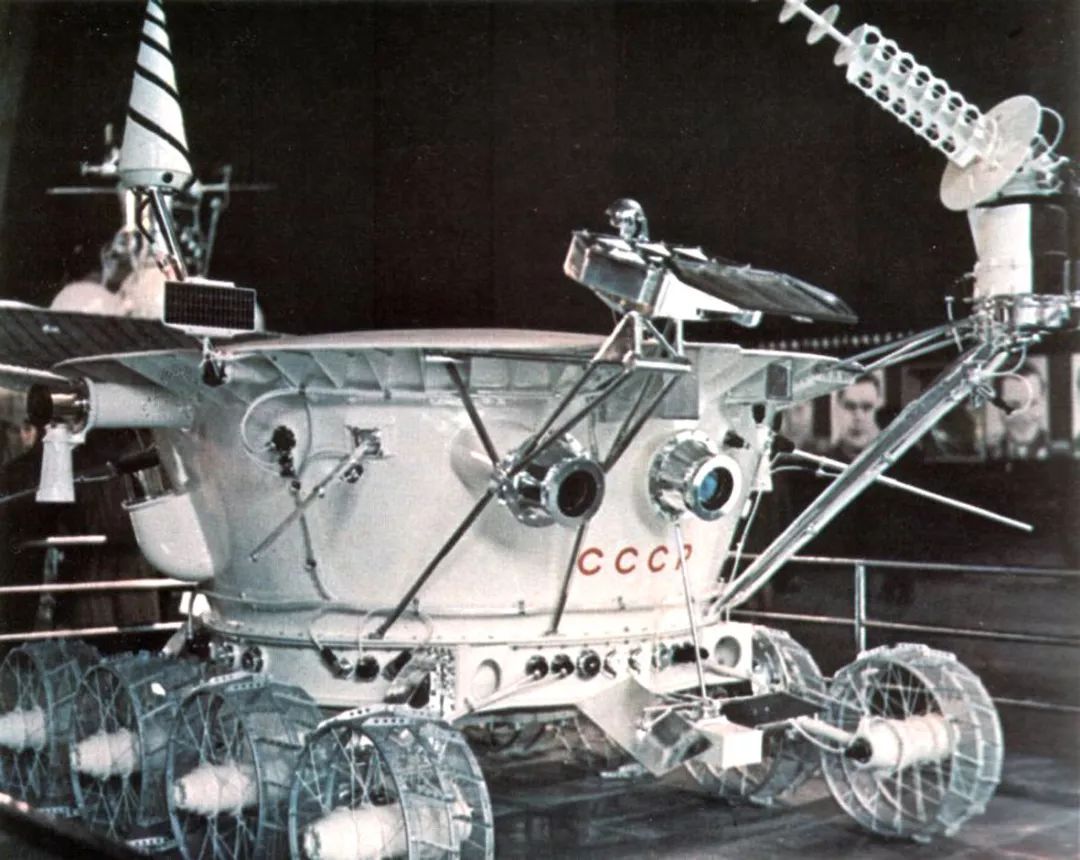
月行者-1 号大概昌河牌小面包车大小,长 2.2 米,宽 1.6 米,质量 756 千克。车分上下两部分:上部分是仪器舱,下部分是自动行走底盘。仪器舱是由镁合金制成的密封舱,它保证仪器仪表在月球上工作时不受外部环境影响,舱内装有无线电遥测设备、供电系统、温控系统等,还载有 4 台全景摄像机。自动行走底盘下装有 8 个车轮,每个轮毂都安装了一台电动马达。
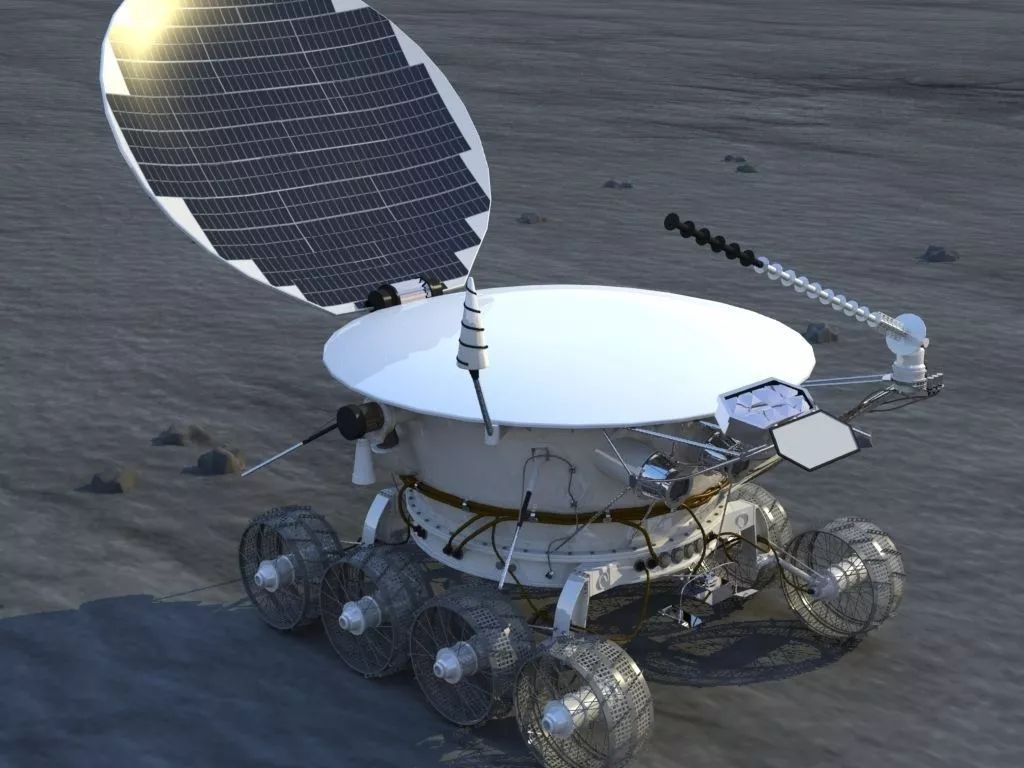
月行者 1 号在月亮白天充电运行;晚上冬眠,由放射性同位素钋 210 衰变产生的热量进行保温,保证仪器不因低温而损坏。月球车设计寿命为 3 个月,实际工作 11 个月,行程 10540 米,拍摄了两万多张月面照片。1973 年接着又发射了月行者 2 号,老二成为了长跑冠军,在地外奔跑了 42 公里,这个记录直到 2014 年才被美国机遇号火星探测器赶上。
结束语
当你再次凝视着月球时,想象一下三个美国月球漫游车、两个苏联月行者月球车、以及中国月球车玉兔,这些月球车被运往外太空,进行无畏的探索,请不要忘记在这些航天项目背后,为之付出青春年华、家庭幸福的航天工作者。
感谢毛新愿博士和林惠在本文编写中给予的支持。
本文作者:新浪微博 ID:超超级 Loveovergold
经公众号航天爱好者授权转载
封面来源:视觉中国
✪更多阅读

按压扫描 持续关注






