【深度】信息物理系统技术综述

李洪阳, 魏慕恒, 黄洁, 邱伯华, 赵晔, 骆文城, 何晓, 何潇. 信息物理系统技术综述. 自动化学报, 2019, 45(1): 37−50
计算技术、通信技术和控制技术的快速发展, 引起了人类社会生活的巨大变革。随着信息化和工业化的深度融合发展, 传统的单点技术已不能适应新 一代生产装备信息化和网络化的需求。在这一背景下, 信息物理系统 (Cyber-physical system, CPS) 顺势而出, 其作为当前自动化领域的前沿研究方向, 相关研究工作已经取得了初步进展。
CPS支撑信息化和工业化的深度融合, 通过集成先进的感知、计算、通信、控制等信息技术和自动控制技术, 构建了物理空间与信息空间中人、机、物、环境、信息等要素相互映射、适时交互、高效协同的复杂系统, 实现系统内资源配置和运行的按需响应、快速迭代、动态优化。CPS的实现具有层次性 , 可分为单元级、系统级、系统之系统级三个层次, 由感知和自动控制、工业软件、工业网络以及工业云和智能服务平台四大核心技术要素构成。加强CPS技术的研究, 推动CPS技术的应用对 “中国制造2025” 战略的顺利实施和提升我国科技实力具有重大的现实意义。
目前国内外对CPS的研究中, 由于领域和着眼点的不同, 研究人员对CPS有着不同的理解, 由此出现了几种CPS的外延。德国 “工业 4.0” 旨在促使制造产业迈向高值化, 以CPPS (Cyber-physical production system) 打造的智能工厂即为“工业 4.0” 的精髓。中国工程院院长周济在《关于中国智能制造发展战略的思考》的报告中提及HCPS (Human-centered cyber-physical system) 这一概念, 强调了传统的制造过程在智能制造战略下将从 “人 – 物理系统” 的二元体系关系向 “人 – 信息 – 物理系统” 三元体系关系进行转变。CPS在工业领域的创新应用, 形成了工业信息物理系统 (Industrial CPS, ICPS)。除了工业界的广泛研究, CPS也得到了学术界的高度重视。本文的出发点是结合现有文献, 根据技术的应用特点对CPS的现有研究成果进行综述, 力争达成学术界与工业界对CPS认知上的共识。
本文首先对CPS进行简要介绍, 之后根据技术的应用特点对CPS当前的研究进展进行综述, 并给出系统级和系统之系统级两个层面的CPS的实际案例, 最后进行总结, 并探讨CPS研究中亟待解决的问题以及未来可能的研究方向。
1 CPS研究方向概述
CPS的智能化实现大致分为四个阶段, 第一阶段是CPS对系统环境信息的自主感知; 第二阶段是在通过传感器网络获得感知信息后, CPS对获取到的信息进行适当的处理, 例如剔除无用的信息, 对信息进行分类等; 第三阶段是在建立数据库的基础上, 对CPS进行整体系统的建模, 完成认知任务; 第四阶段是通过整体模型与数据库, 实现最终决策与系统控制。根据以上四个阶段的递进任务, 将CPS技术研究分为CPS感知设计技术、CPS信息处理技术、CPS建模与认知技术、CPS决策与控制技术。
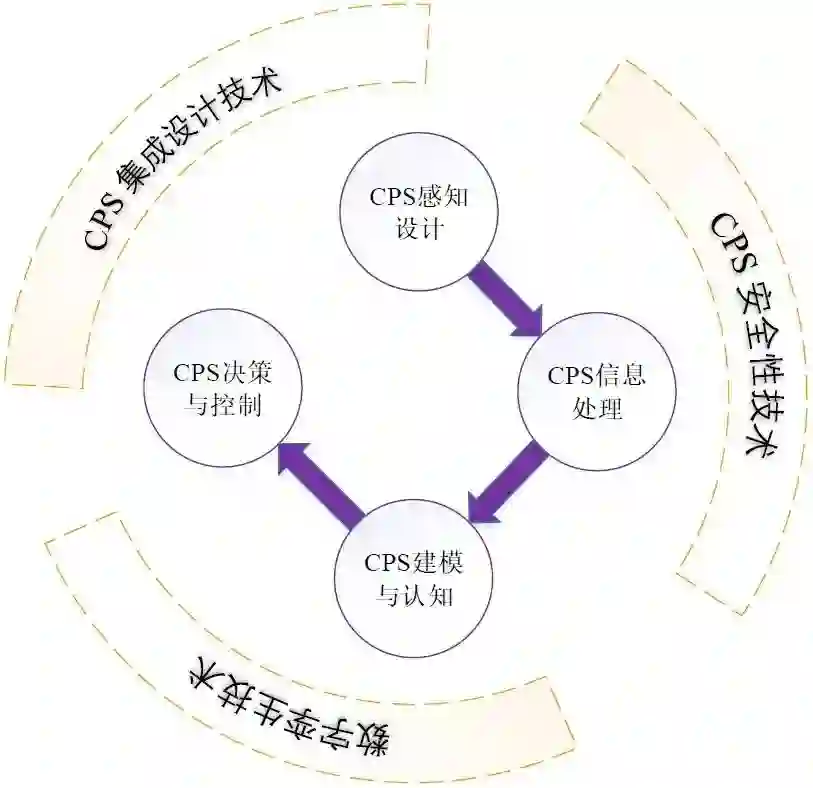
图1 CPS研究方向关系图
另外, 因为CPS集成了大量多样的子系统, 而且涉及网络通信技术等。上述四项技术之外, CPS从整体设计到控制决策的每一步还需要对CPS集成设计技术、数字孪生技术和CPS安全性技术等进行研究。综上所述, 给出CPS研究方向关系图。其中中间的四个阶段是CPS的分步骤设计, 环形的三个技术是系统整体设计时需要考虑的技术, 在图中以环形包围四个分步图的形式表示。
2 CPS系统案例
CPS是典型的开放智能系统, 其发展的较高层次应具有开放智能系统的五个基本特征: 状态感知、实时分析、自主决策、精准执行和学习提升, 即 “20 字箴言”。目前对CPS的研究有如下特点: 新概念较多、技术细节研究较多、整体技术研究较少、核心科学问题研究较少以及具备明显CPS系统特征的实际系统 (例如分布式网络化控制的插电式充电汽车充电桩和中继系统) 较少。本节从系统级和系统之系统级两个方面分别给出CPS的系统案例。
2.1 基于Internet的网络化三容水箱系统
基于Internet的网络化三容水箱系统构建于2009年, 是清华大学自动化系过程控制教研室在三容水箱这一经典硬件平台基础上进行的CPS的初步尝试, 其核心改动是网络化。基于 Internet的网络化三容水箱系统由一个DTS200三容水箱系统、两个网络化控制系统 (NetCon)、一个网络摄像机、一台上位机及Internet网络组成。DTS200三容水箱系统外观如图2所示。其中 T1, T2, T3 是三个圆柱形水箱, 各个水箱之间装有连接管, 连接管中间装有球阀以控制水流量, T2水箱的水通过管道流向蓄水池, 水泵将蓄水池里的水打入水箱T1和T2。NetCon系统主要由网络化控制器、网络化可视控制组态软件和网络可视化监控组态软件组成。它作为网络接口, 可以用来对水箱水位进行控制。网络摄像机用于水箱系统的监控。上位机的作用是进行实验操作, 并观测系统的运行。网络用来进行数据传输。
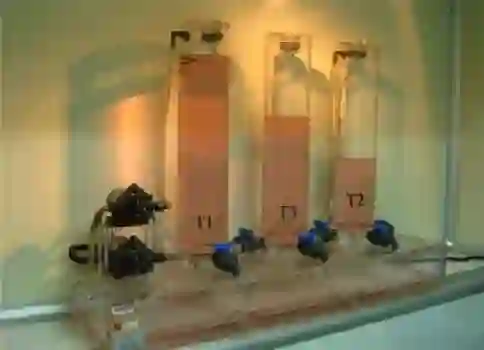
图2 DTS200三容水箱系统实物图
在实验中, 两个NetCon系统 (NetCon1 和 NetCon2) 分别位于不同地点。三容水箱系统放置于清华大学, 通过NetCon1与网络相连, 进行数据交互。网络摄像头放置在三容水箱附近, 实验人员可以在任意位置对三容水箱进行监控。NetCon2系统放置在格拉摩根大学 (现为南威尔士大学), 此系统可以通过网络对三容水箱系统进行准确地液位控制, 并对系统发生的泄漏、堵塞、传感器、执行器等故障进行及时的检测、分离、估计及容错处理。这种控制形式符合CPS的特征, 可以说基于Internet的网络化三容水箱系统是CPS的一个系统级应用案例。
2.2 智能船舶运行与维护系统
中国船舶工业系统工程研究院基于系统之系统级CPS体系架构, 结合我国海洋装备技术和应用特点, 在国内首次研制以装备全寿命周期视情使用、视情管理和视情维护为核心, 面向船舶与航运智能化的智能船舶运行与维护系统 (Smart-vessel operation and maintenance system, SOMS), 为用户提供定制化服务, 利用智能化运维手段, 降低运行与维护成本, 并进一步面向船队、船东和船舶产业链, 分别设计了船舶 (个体)、船队 (群体) 和产业链 (社区) 的CPS应用解决方案, 为整个船舶产业链提供面向环境、状态、集群、任务的智能能力支撑。
SOMS系统的架构可以概括为 “两端 + 一网 + 两云” , 即自主控制端、智能管理端、工业传输网络和 “本地云 + 远程云” 的混合云平台四部分, 涵盖了CPS状态感知、实时分析、科学决策、精准执行四个过程。在2017年中国船舶工业集团公司发布的全球首艘经船级社认证的智能船舶 “大智号” 中, SOMS系统的架构应用部署图如图3所示, SOMS系统通过了英国劳氏船级社和中国船级社的双认证, 成为全球首套同时满足中国船级社智能船舶规范智能能效E、智能机舱M、智能集成平台I符号以及英国劳氏船级社Cyber-enabled ship智能船舶规范中Cyber SAFE, Cyber MAINTAIN, Cyber PERFORM符号要求系统的民用智能船舶系统产品。自主控制端借助感知与自动控制技术实现个体、群体、环境、活动等多目标数据的感知与获取以及对设备、系统、单船与船队的自动控制。云平台借助工业云技术, 采用“本地云 + 远程云”的混合云架构既保证了本地计算的实时性、隐私性与安全性, 又保证了远程计算的共享性、协同性与高效性。智能管理端面向设备、系统、单船和船队故障预测、健康管理、能效优化和辅助决策等需求, 搭建了智能服务平台。自主控制端、智能管理端和混合云平台通过工业网络和工业软件技术形成数据驱动的CPS闭环赋能体系。

图3 SOMS系统架构应用部署图
自主控制端借助感知与自动控制技术实现个体、群体、环境、活动等多目标数据的感知与获取以及对设备、系统、单船与船队的自动控制。云平台借助工业云技术, 采用 “本地云 + 远程云” 的混合云架构既保证了本地计算的实时性、隐私性与安全性, 又保证了远程计算的共享性、协同性与高效性。智能管理端面向设备、系统、单船和船队故障预测、健康管理、能效优化和辅助决策等需求, 搭建了智能服务平台。自主控制端、智能管理端和混合云平台通过工业网络和工业软件技术形成数据驱动的CPS闭环赋能体系。
3 结束语
CPS是支撑信息化和工业化深度融合的综合技术体系, 加强CPS技术的研究、推动CPS技术的应用对 “中国制造2025” 战略的顺利实施、提升我国科技实力具有重大的现实意义。本文根据技术的应用特点对CPS当前的研究进展进行了详细分析, 并给出了系统级和系统之系统级的CPS案例。作为工业智能发展的一种支撑技术体系, CPS正朝着体系化、复杂化方向发展, 尤其是对赛博 (Cyber) 空间中自主的认知与学习能力、控制与决策能力需求以及对实体空间中实时反馈能力、精准执行能力需求日益提升。因此, 对于CPS的技术发展与应用实践提出了更高的要求, 同时也存在挑战。
1) 层次化CPS平台体系的挑战。对于CPS应用而言, 如何构建层次化的平台体系是实践的关键环节之一。目前CPS的应用平台尚缺乏明确定义, 面向产品级、系统级等不同层次的CPS应用平台构建仍处于探索阶段, 尚未形成统一标准体系。
2) CPS架构设计的挑战。尽管CPS技术在工程领域已有一些应用成果, 但从主流企业实际采用的解决方案来看, 架构设计仍处于探索阶段, 尚不成熟, 也缺少一些面向CPS复杂层级应用的新型架构设计, 例如引入微服务、数字孪生建模、混合事件驱动设计等。
3) 数字孪生建模的挑战。作为实现CPS的关键基础之一, 数字孪生建模的准确性、实时性、同步性等特性从一定程度上决定了CPS技术的应用效果。目前多采用传统仿真方法构建应用对象的数字孪生模型, 高效性与有效性有待进一步提升。
4) 开放空间下赛博安全的挑战。网络架构、链路质量、传输安全、外界干扰、人为入侵等安全风险无处不在, 尤其在开放空间下, 系统缺陷和不足给CPS服务的持续性、正确性、安全性带来巨大危险, 赛博安全风险管控任重道远。
5) CPS测试验证技术的挑战。对CPS的测试验证方法与手段是CPS技术发展的重要保障和支撑。目前, CPS测试验证技术相关的理论知识基础比较薄弱, 导致受重视程度和发展速度远远低于其他研究方向, CPS的测试验证技术也是CPS未来的重要发展方向之一。

来源:AAS自动化学报
往期文章推荐
🔗【重要通知】关于开展2019年度中国自动化学会会士候选人提名工作的通知
🔗【重要通知】关于2019年度CAA科学技术奖励推荐工作的通知
🔗【重要通知】关于开展第五届中国自动化学会青年科学家奖推荐工作的通知
🔗【CAA】不忘初心,砥砺奋进 ——中国自动化学会蓬勃发展的五年
🔗【重要通知】关于2019年度CAA高等教育教学成果奖推荐工作的通知
🔗【重要通知】关于开展2019年CAA优秀博士学位论文奖励及推荐工作的通知
🔗【重要通知】关于召开2019国家机器人发展论坛暨Robocup机器人世界杯中国赛、2019年中国自动化产业年会的通知
🔗【CAA】中国自动化学会选举产生第十一届理事会领导机构(内附名单)