日本东北大学小菅一弘教授:在教会机器人跳舞后,我们又有了更远大的目标

人类与机器人的互动。
AI 科技评论按:7 月 12 日-7 月 14 日,2019 第四届全球人工智能与机器人峰会(CCF-GAIR 2019)于深圳正式召开。峰会由中国计算机学会(CCF)主办,雷锋网、香港中文大学(深圳)承办,深圳市人工智能与机器人研究院协办,得到了深圳市政府的大力指导,是国内人工智能和机器人学术界、工业界及投资界三大领域的顶级交流博览盛会,旨在打造国内人工智能领域极具实力的跨界交流合作平台。
7 月 13 日,日本东北大学机器人系教授、IEEE RAS 主席、IEEE Fellow 小菅一弘教授为 CCF-GAIR 2019 分会场「机器人前沿专场」做了题为「Co-worker Robot PaDY」的大会报告。以下为小菅一弘教授所做的大会报告全文。
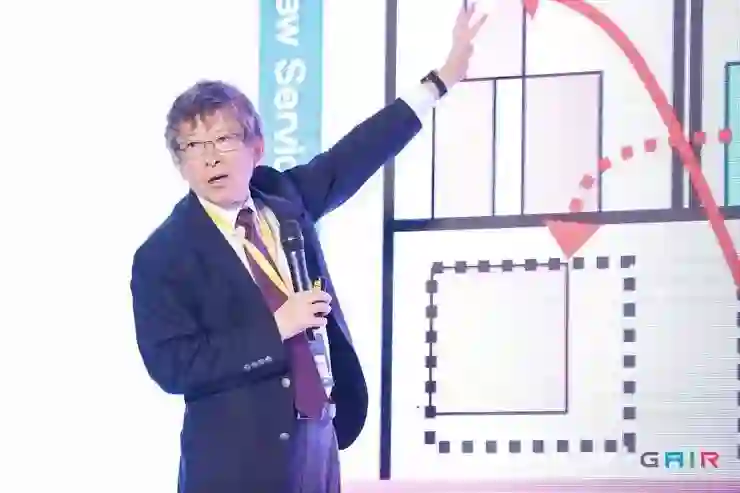
很高兴有机会给大家做分享,我是来自日本东北大学的机器人系教授小菅一弘,今日主要想谈协作机器人。我收到邀请时,被告知有 30 分钟的分享时间,现在看来我很可能会超时,希望这次演讲能给大家带来更多有趣的信息。
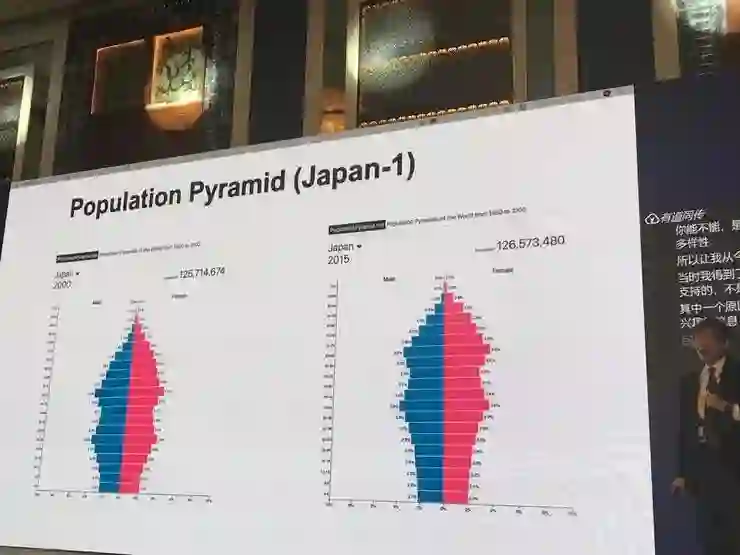
首先,给大家看在日本收集到的一些数据,当中就包括了对 2030 年及 2050 年的人口预测。
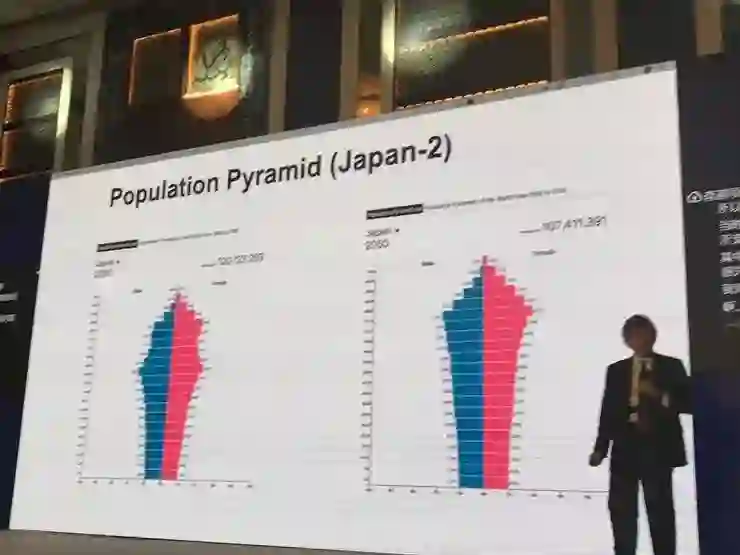
今日上午,我在酒店楼顶欣赏了一下深圳的城市风光,我发现这座城市的风景非常好,尽管这样,我们依然不能忽略社会上存在的一些问题和挑战,这些都值得我们在未来去做更多努力。
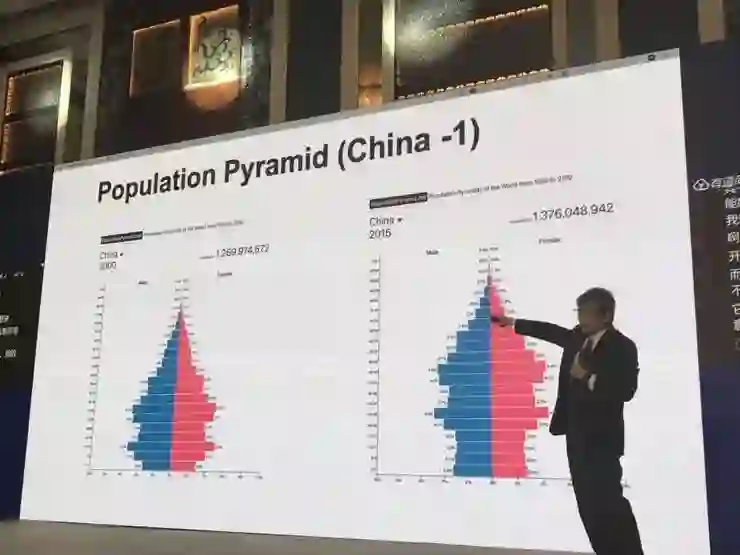
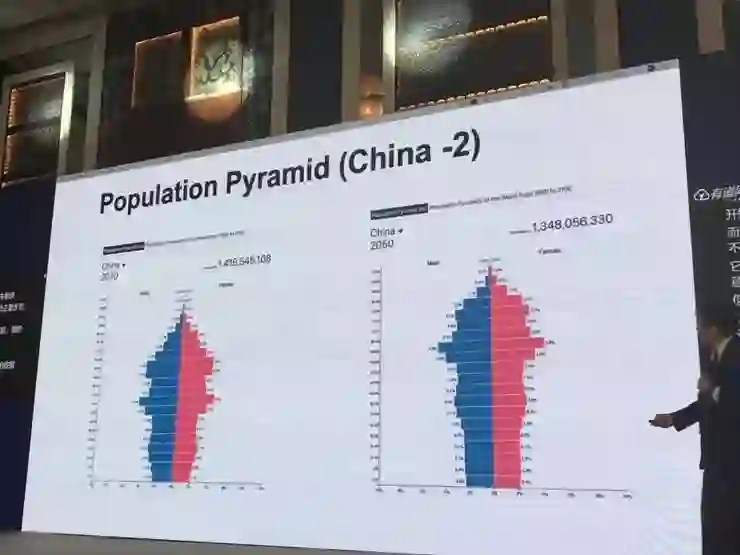
以上两张图是截至 2050 年的中国人口预测数据,简单来说,人口老龄化的情况会变得越来越严重。而美国的预测数据要比中日两国好,可能是与美国很多人不愿意提前退休,即便到了退休年龄还在继续工作有关。
之前《金融时报》的某个文章截图表明,在 2016 年到 2017 年期间,日本一些公司招不到员工上班,在缺乏人力支撑业务的情况下,这些公司只好宣布破产。美国也存在相应情况,2018 年 10 月 10 号的一个数据显示,美国到了 2028 年可能会面临的一个挑战是,很大一部分人将欠缺未来所需的必要技能,最终会对整个社会经济造成很大的损失。
另外还有一组来自联合国的数据显示,68% 的世界人口到 2050 年时都会生活在城市里,这说明城市化的趋势是相当明朗的。这样的环境将会充斥着各种摩天大楼,有的人也许很喜欢这种环境,但结合我们刚刚提到的挑战来看,很多问题在未来将是潜藏存在的,比如建筑需要加强结构设计来尽可能容纳更多人,以创造更多的集约化空间。
接下来,我将与大家分享机器人研究所遇到的挑战和机遇,包括机器人可以完成哪些事情、存在哪些机器人类型,以及不同类型的机器人所对应的使用场景。
日本差不多在 10 年前便开始启动机器人学研究,当时主要研究将对社会带来什么影响,不过那时候取得的成果很少,最起码在 2010 年时的进展依然不大。鉴于此,日本政府希望能够做一些推进,尤其是探讨机器人在服务业方面的机会。
我们做了基本分类,从个人、社区、国际社会三个角度出发,探讨机器人分别能产生哪些价值。
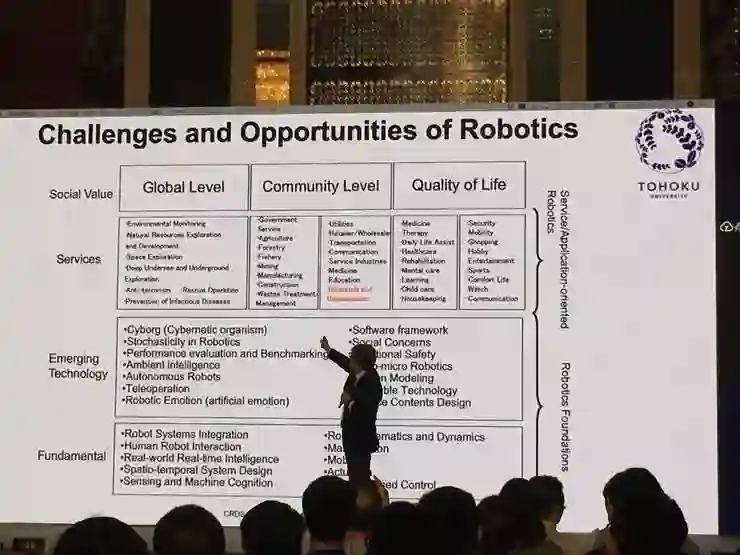
这张由我列出的表格中,清楚描述了机器人在每个层面所带来的挑战和机遇。在国际层面,机器人可以介入的服务包括环境监控、自然资源探索、太空探索、深海/浅海探索等;在社区层面,可介入的服务包括政府服务、农业、森林、渔业、挖矿、基础设施建设、制造业、建筑业等;在个人生活品质的提升层面,包括在医疗、健康等方面都能带来许多正面影响。
由于今天的会议跟人工智能相关,所以我选择了一个细分主题叫「人类与机器人的互动」。人类与机器人互动的历史非常悠远,说白了即是一个增强人类力量的功能,看起来仿佛很简单,然而事实却不是这样的。从机器人,到操作员,再到环境,这三者之间的互动是非常微妙的,任何一个小动作都会牵涉到三者之间的综合性变化。为了协调它,看似简单的一个动作,都要在控制方面做非常多的努力。
另外一个我个人比较感兴趣的话题是人类如何与机器人进行合作,因为这是未来人机协作方面非常核心的话题。
有一款差不多是在 20 年前被发明出来的机器人助手,从人机协作的层面来看非常成功,因为它可以帮人抬桌子。另外还有一款连接式机器人,通过两个配套的机器人,可以帮人类移动柜体。
采用这些相近技术,我们可以拓展到更多领域促成更多的事情。况且,当时我们还缺乏精确的控制技术,因为不存在优质的感知系统。换句话说,如果我们想控制一个移动机器人的精确移动,就要提高在机械力学方面的精度,这样机器人才能够在不借助人类的帮助下自主地移动物体。
刚刚介绍的是我们早期做的一些实验,我们可以看到一些简单的操作是可以由机器人配合人类去完成的,与此同时,我们也发现在一些比较泛化的任务上,实际操作起来还是有点困难的,即使配置的是一个辅助型机器人系统。这是因为它无法理解这件事情。为了促进机器人与人类的合作,我们需要做的包括:
使其了解任务指的是什么
使其了解人类的意图是什么
使其了解人类需要获得的具体是哪些帮助
也许还有其他的内容,但我相信这三点是最重要的,相比起 10 年前,如今多了人工智能的加持后,这三点其实已经做得越来越好了。
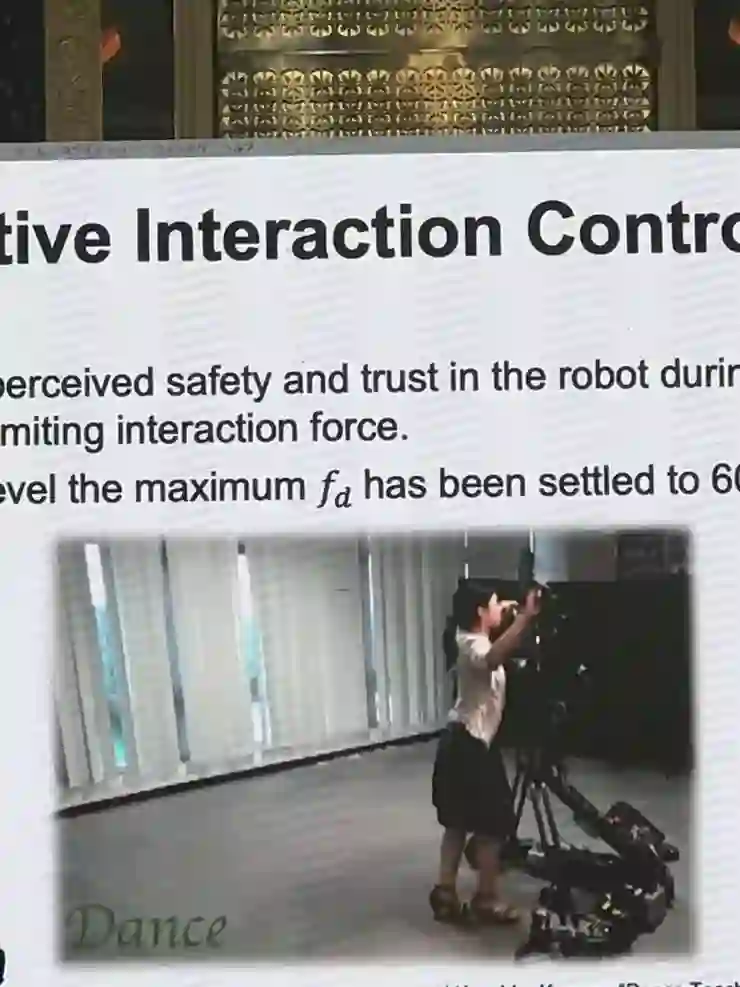
我们后来做出了许多有趣的机器人,比如会跳舞的舞伴机器人。舞伴机器人可以对舞步提前做出精准的预测行为。一般是男女两个人共舞时,我们通过有形的物体去进行操作,这是一个基本的人机互动例子。这个研究非常有意思,我曾这样告诉过我的学生,通过使用我们的研究,就能学会跳舞。
我们的跳舞行为是由一系列的动作组成的,一般是男性舞者做引导,女性舞伴进行配合,然后再根据跳舞规则以及周围环境来完成的,所以得有相应的参数。作为女性舞伴,她必须根据自己对舞蹈的认识和经验来配合男性舞伴,这也意味着女性舞伴必须对舞蹈非常了解,才能与男性舞伴配合好。换而言之,只有对舞蹈的规则设置了然于心,我们才能开发出这么一个女舞伴系统,当然,第一版并不太完美,但已在 2005 年的濑户世博会上被使用起来了。

这是一款很古老的机器人,经过这些年都有点破旧不堪了,接下来我们尽量往极简主义的方向去做。
在多维视觉方面,最开始的版本并不存在上下运动的操作,但考虑到上下运动对舞蹈而言非常重要,所以我们后来做了相应改进,既可以上下,又可以倾斜。此外,为了让机器人在跳舞时能顺利预测后面的舞步,我们决定把信息输入到机器人的上肢中,因此设计了相应的舞步预估机器,使其能在跳舞过程中通过数据录入来预测接下来的舞步。
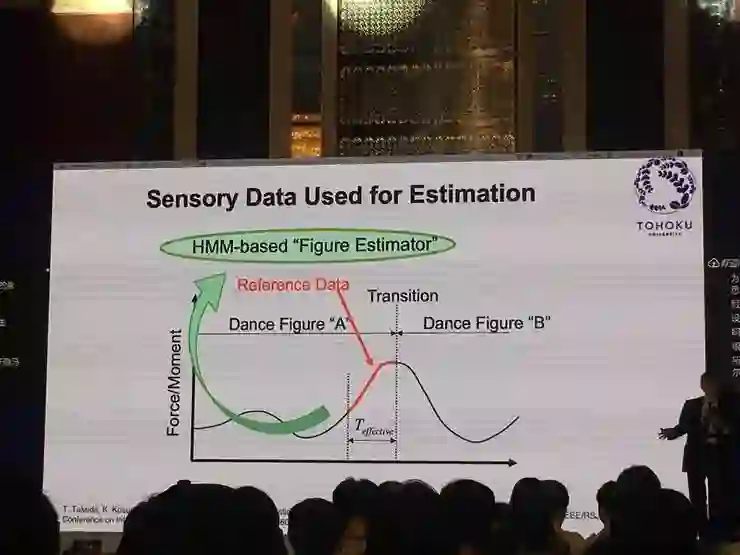
需要强调的是,当时的 CPU 处理器的处理速度要比今天慢得多,但我们还是基于当时的处理器开发出了舞步预估机器,从而把舞伴机器人给成功创造出来。
在濑户世博会上,我们通过 10 天的时间向大众展示了舞伴机器人的魅力,给广大参观者留下了深刻的印象。后来很多人问我这么一个问题:这个东西设计出来,商业价值体现在哪里?有人说了,可以放在日本的舞蹈学校中应用,但在现实中,这些学校的女性舞者数量大大超过了男性舞伴,根本就不需要这种女舞伴机器人。
无论如何,在这个研究过程中,我们更好地解读并理解女性舞者。2005 年,《时代》杂志把我们的研究评为当时最震撼人心的一个发明。近期有个韩国人告诉我,这个舞伴机器人在韩国的名声也很响亮。
舞伴机器人还存在哪些挑战呢?还是得回归到与人的互动上,以及对人类行为和意图的理解,然后在这过程中完成预测和互动,这些都还存在进步空间。另外前面也提到过,日本舞蹈学校欠缺男性机器人舞伴,而男性舞者起的是领舞作用,如何让机器人领舞的意图被人类舞伴所理解,依然是需要攻关的课题。
这是另一个典型的画面,图片中显示的是过去的汽车工厂,这些工厂的生产线往往是由机器人负责组装的。实际上,我们依然可以看到现实还存在许多需要人类亲自动手组装的环节,因为这部分组装工作对机器人而言存在难度,如果在这样一个空间里,能有一个机器人给人类递去相关零部件,那么人类就能专注于配件与车身的连接,工作效率也就能获得明显的提升。
由我们创造出来的这款机器人名叫 PaDY,可以用来进行汽配零件的传递和交付,最终达到减少工作负载与错误率的目的。从 ISO 标准来看,它已不是单纯的机器人,因为我们是按照 ISO 安全法规部署到位的——换句话说,我们的系统是基于公司的政策和规章制度来进行设计的。把 PaDY 引进后,我们可以有效把工人工作的时间缩短 20% 到 30%,当然还要取决于具体执行任务的差异化。
这背后有很多故事,我们将它引进到工厂里使用几个月后,厂方决定不再继续使用,因为确实存在一些问题,需要我们进一步去提升性能,而我们提升性能使用的最主要手段就是机器学习。
为了改进早前系统存在的问题,我们需要收集历史统计数据,这样工厂的生产线工程师才能根据收集到的数据提前进行编程。由于生产线经常有变化,主要取决于每天量产的车数以及配置的工人数量,于是我们设置了实时、自动进行数据收集的系统,这样就能针对这些工人的工作进行建模,然后基于建模进一步判断该如何对机器人进行良好控制。
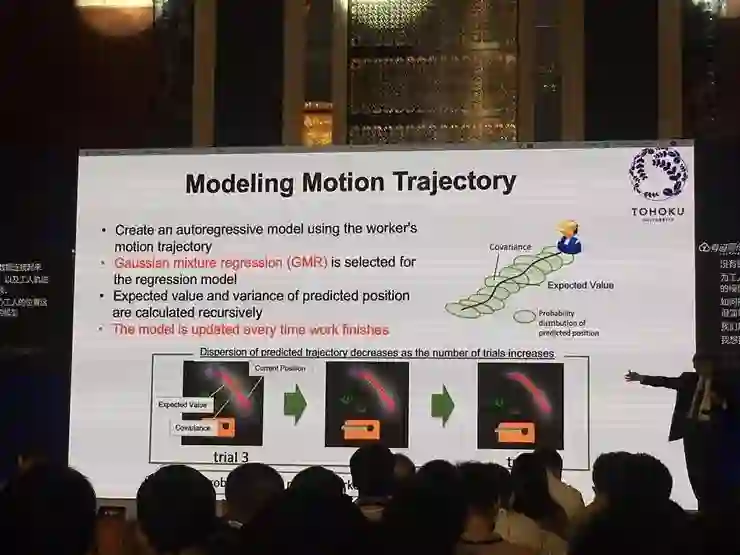
我们使用的是回归模型建模方法,当工人完成一项任务时,我们就会进行回归分析,从而获知都存在哪些工作步骤。
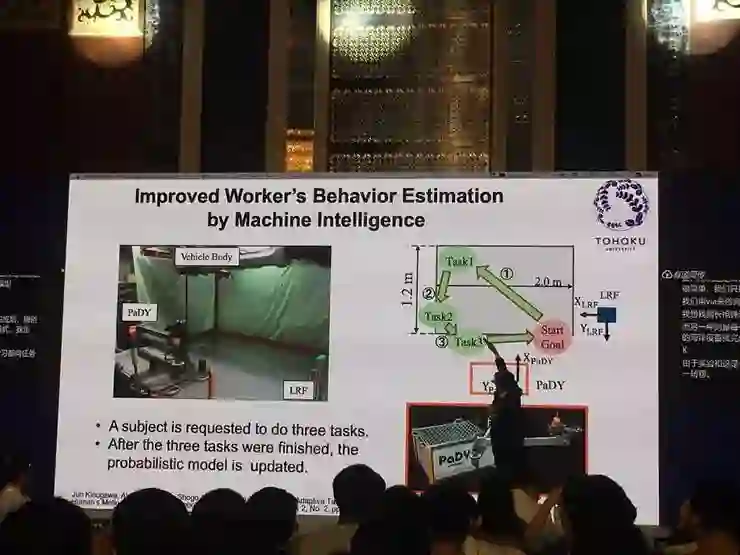
这是我们实验室所做的一个实验,可以看到存在这么一个循环链条——先执行任务 1,然后执行任务 2,最后再到任务 3,最后又回到前面的动作。类似的实验主体只要重复 10 次实验,系统就能正式运转起来。
工厂的管理人员告诉我,有时工人试图按照不同的流程来进行操作,为此,我们又另外开发了一个控制系统,来应对工人不按照标准流程进行操作的问题。我们的系统会进入自主学习模式,进而习得人类新的行为模式。当然,这个工作还在不断扩展当中,我们试图把这样一个理念扩展到组装线上去。刚制作出来的机器人有时跟公司现状不是特别匹配,这时就需要你做相应的调整。
最后,进入到我的演讲小结。
我们在全球范围内遇到了各种各样的挑战和问题,当下的机器人可以做更多突破与创新,尤其是在应用方面。我希望未来能有更多以应用为导向的研究和发展,而人机协作是近来机器人领域的重点探讨问题,因为我们在日常生活中非常需要类似的助理型机器人。演讲中我具体介绍的案例包括舞伴机器人和装配机器人 PaDY,最后也介绍了相关的运作原理。总而言之,希望未来能看到更多机器人的应用场景。感谢大家的聆听。