摆脱电缆、可移除四肢,NASA 人形机器人「女武神」替人类奔赴灾难场景
机器之心分析师网络
本文对NASA开发的Valkyrie人形机器人进行了详解,包括这款机器人与机器宇航员2号(Robonaut 2)的区别、算法与技术以及任务完成情况等。相信读者会对Valkyrie人形机器人的研发背景、构造算法以及未来场景的应用有更清楚的了解。

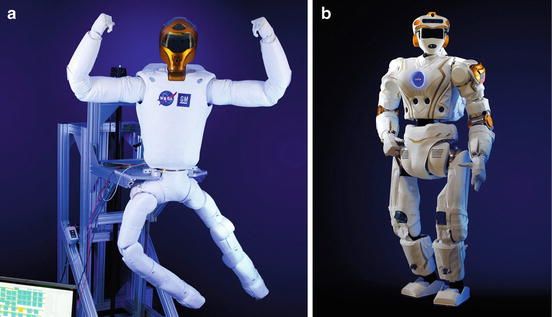
「NASA 的空间探索目标是到达火星,为了到达火星,NASA 很可能会先于人类探险家派出机器人。当人类到达时,这些机器人就能够和人类一起工作。Valkyrie 将会被用于探索火星的项目中」[1];
「NASA 致力于现在和未来的人形机器人的操作和能力创新,特别是与太空探索任务相关的任务执行。NASA 对人形机器人的兴趣来源于它们潜在的能够高效操作设备的能力,以及它们作为宇航员助手有效运作的能力。NASA 对在极端太空环境中使用人形机器人的兴趣,也与类似机器人在救灾等地面应用中的潜在用途相重叠。」[2]





登录查看更多
相关内容

国际期刊《符号计算杂志》由布鲁诺·布赫伯格于1985年创办,面向对符号计算有特殊兴趣的数学家和计算机科学家。该杂志为研究所有类型符号对象的算法处理提供了一个论坛:形式语言中的对象(术语、公式、程序);代数对象(基本数域、多项式、留数类等中的元素);几何对象。官网链接:https://www.sciencedirect.com/journal/journal-of-symbolic-computation/about/aims-and-scope
Arxiv
5+阅读 · 2018年9月6日
Arxiv
6+阅读 · 2018年1月24日





相关VIP内容
相关资讯
相关论文
Arxiv
5+阅读 · 2018年9月6日
Arxiv
6+阅读 · 2018年1月24日