【2022全国科技周】“自动驾驶技术揭秘”科普云讲堂成功举办
2022年5月26日晚,为吸引学术界研究者、工业界从业者参与推动自动驾驶技术,扩展普通民众对自动驾驶技术的认知,中国图象图形学学会三维视觉专委会(CSIG-3DV)组织了一场精彩的线上科普云讲堂-“自动驾驶技术揭秘”。本次活动邀请了地平线智能驾驶感知研发部负责人苏治中博士和深圳奥锐达科技有限公司激光雷达研发负责人陈文胜博士,分别做了“面向大规模量产的自动驾驶感知研发与实践”和“基于单光子测距原理的固态激光雷达技术”的报告,报告由中国地质大学(武汉)孙琨副教授担任主持人。
首先,苏治中博士作了“面向大规模量产的自动驾驶感知研发与实践”的科普报告,内容分为4个部分:1)地平线自动驾驶环境感知量产实践;2)软硬协同的自动驾驶感知算法设计;3)实现规模化量产的“最后一公里”;4)感知技术的发展趋势。苏治中博士首先介绍了地平线已量产和即将量产的主要产品,并从Backbone、Task设计以及Multi-task model三个方面为大家讲解了算法的设计;随后介绍了在产品量产研发过程中遇到的长尾数据问题并为大家分享了他们的解决方案Horizon Data Flow(HDFlow);最后根据个人经验发表了对自动驾驶技术发展趋势看法。
陈文胜博士作了“基于单光子测距原理的固态激光雷达技术”的科普报告,包括三个主要内容:1)自动驾驶对激光雷达的要求;2)激光雷达的技术路线;3)单光子固态激光雷达技术。陈文胜博士围绕如何设计一台满足自动驾驶要求的激光雷达问题,首先介绍了对激光雷达性能、尺寸、可靠性和一致性的要求;随后在扫描方式和测距原理角度讲述了激光雷达的技术路线,并介绍了团队研发的单光子面阵激光雷达的模型设计,展示了研发成果在实测数据的效果;最后讲述了单光子固态激光雷达的发展趋势的三个方面——发射器、接收器和器件的性能和可靠性。
图 1 苏治中博士作“面向大规模量产的自动驾驶感知研发与实践”科普报告
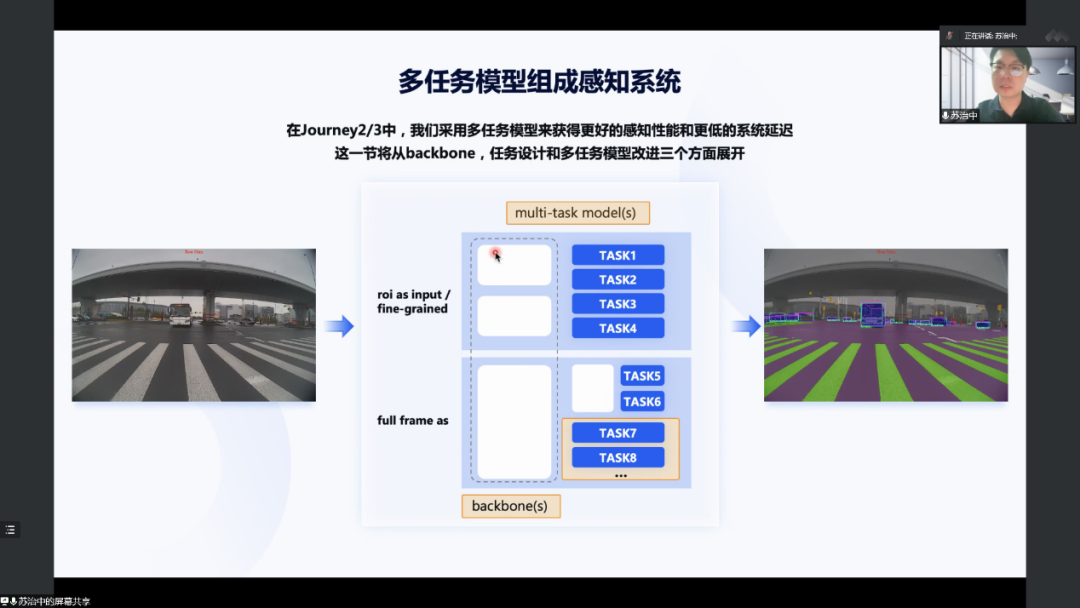
图 2 苏治中博士介绍团队研发的多任务模型组成感知系统
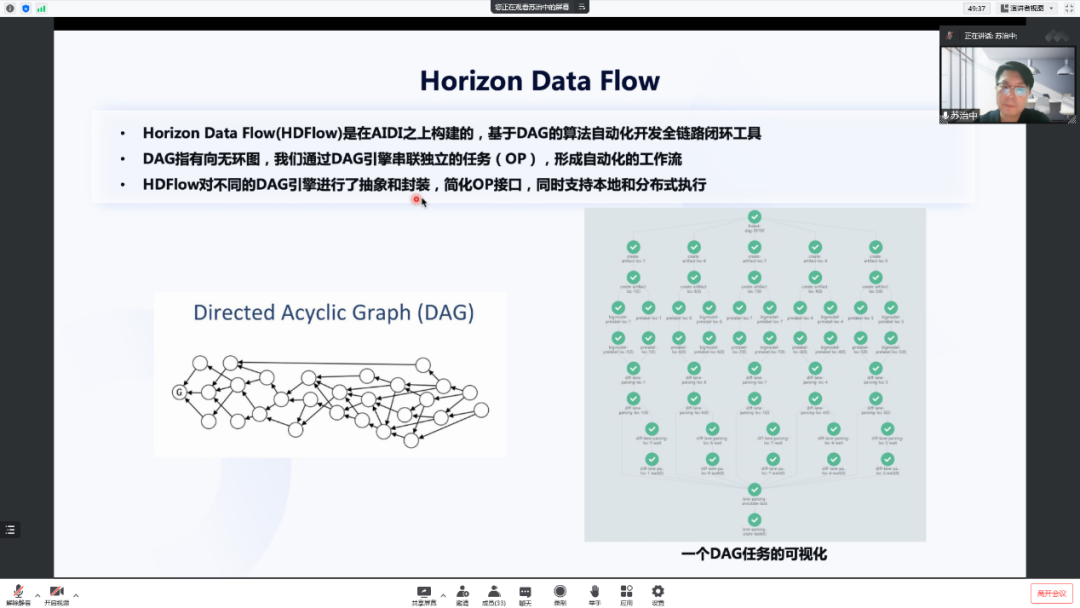
图 3 苏治中博士介绍团队开发的工作流Horizon Data Flow(HDFlow)
图 4 陈文胜博士作“基于单光子测距原理的固态激光雷达技术”科普报告
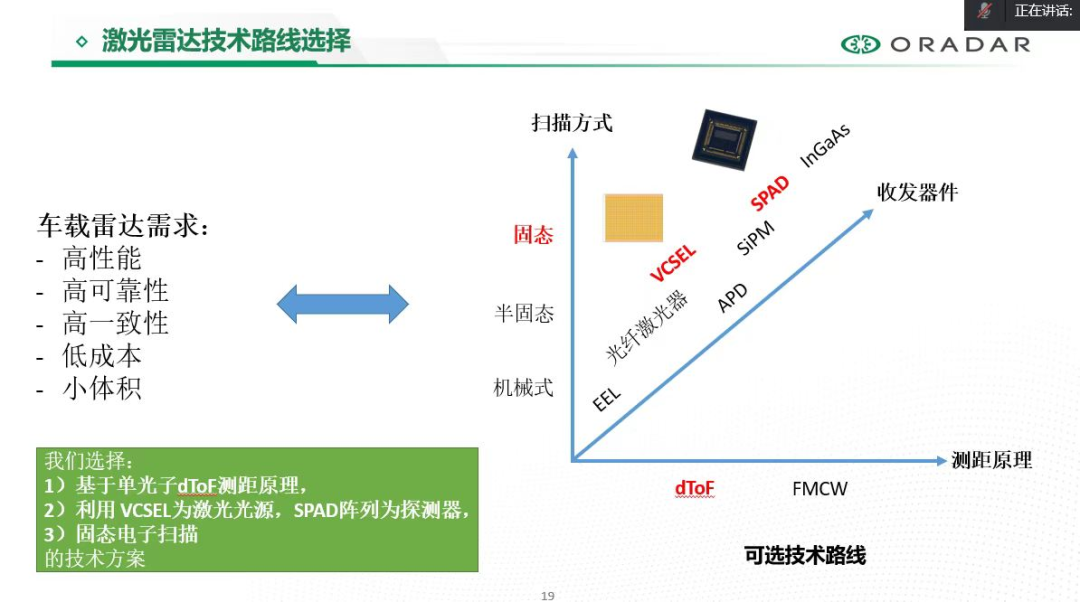
图 5 陈文胜博士介绍激光雷达技术路线
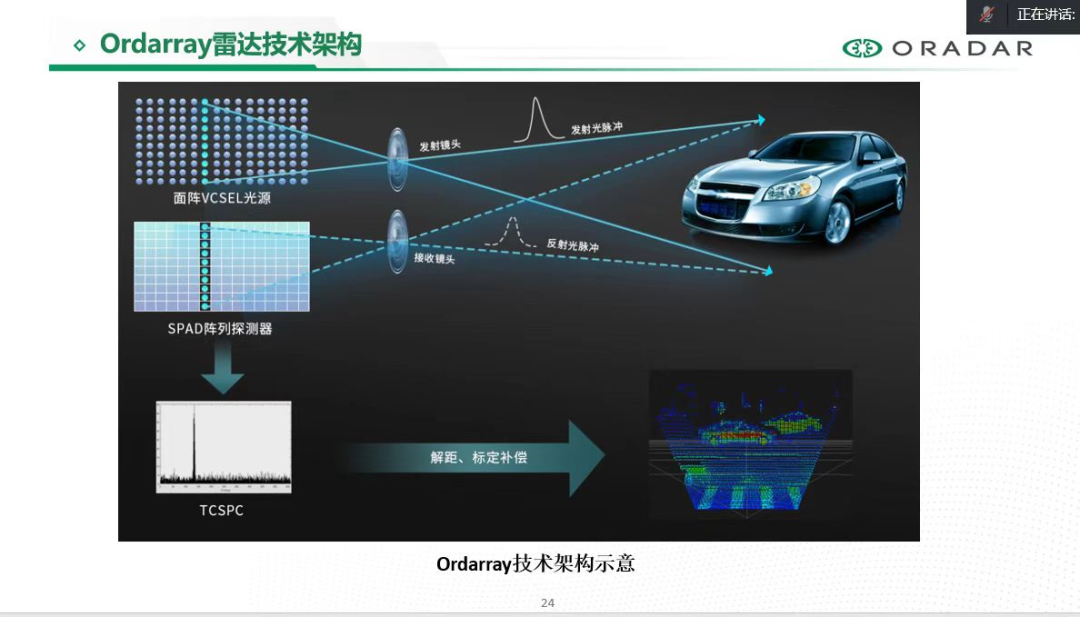
图 6 陈文胜博士介绍Ordarray雷达技术架构
活动过程中观众提问不断,形成了良好的学术交流氛围。本次活动得到了“科创中国”以及“科技工作者之家”的大力支持,对此CSIG三维视觉专委会表示衷心的感谢。
来源:CSIG三维视觉专委会



