深度|缅怀ASIMO!从走到跑孤独领跑30年,如今它已经转身离去

前天展示了波士顿动力最新升级的Atlas机器人
它的三连跳让人感叹科技的发展之快
↓↓
有读者提出
能与之相媲美的也许是日本本田的ASIMO了
今天咱们就来一起了解一下ASIMO吧

Asimo是另一种完全不同风格的机器人
它是全球最早具备人类双足行走能力的类人型机器人
2016年全球机器人排名Asimo当属第一

Asimo是由日本本田技研工业株式会社研制
2000年Asimo首次亮相
18年前可以直立行走
对科技界来说已经是个不小的惊喜
但是你不知道的是
这个惊喜其实是经过了很多年的积累
悉数一番你会从中看到每一点的科技进步
而今天的Atlas机器人的三连跳
也得益于前人的“种树”
才有了今天的“绿荫”
Asimo家族
↓↓

ASIMO 的研发始于1986年
当时只是一个代号叫 E0 的双腿平衡机器人
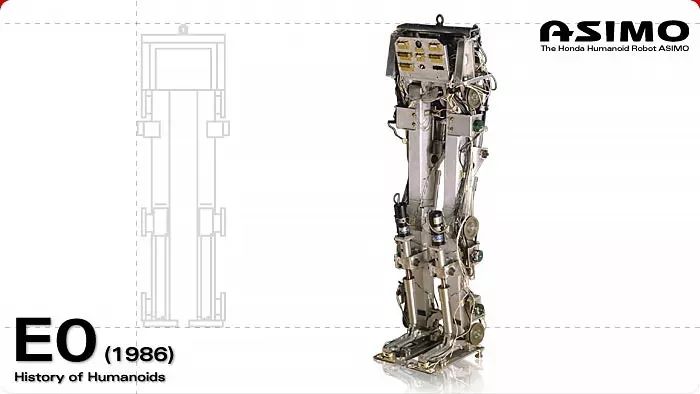
E0首次运用了双足步行的原理
根据直线的静态步行来移动
成功使两腿交替行走
但每步移动花费时间为5秒钟

介于当时的技术还不够成熟
所以那会本田制造的机器人虽然能行走
但非常笨拙
经常会摔倒

1988年, E2 机器人诞生了

它已经能够更像人类那样行走
步行速度达到了1.2公里/小时
一年后
E3 问世
走路的速度已经到了3公里/小时

1991~1993年诞生的E4/5/6
由于加入了平衡控制技术
在步行时主体动作能保持稳定
上楼梯和走斜坡时再也不容易摔倒
这是1991年的E4
长了个红色大脑袋
这时 Ta 的步行速度已经达到了4.7公里/小时

1993年诞生的P1
可以说是成了真正意义上的机器“人”
之前只能算是机械腿
到了 P1 才是真正地加了“上身”
并能模拟人类全身运动的机器人

P1电源和控制计算机都是放在主体之外
可以实现开关门、抓东西搬运等动作
走路与上下楼梯的步伐更加稳健
1996年 P2 问世
这可是世界首个类人智能双足步行机器人

由于把主机、控制马达、电池、无线通讯等必要的机器全部藏起来
不仅实现了无线遥控
还使 Ta 在外观上比较“光鲜”
1997年 P3 出现
个头和体重比之前的都小了
得益于零配件材料的改良
在电脑实现分散型的控制之后
机器人满足了小型化和轻量化的要求
2000年
第一款公开亮相的 ASIMO

当时,这个身高一米二的 ASIMO
用流畅的双脚直立行走方式让科技界沸腾了
2005年, ASIMO 又做了升级

此后就真正get了奔跑的技能
速度可达6公里/小时
ASIMO 在2007年、2011年和2014年又进行了几次升级。
最新版本的Asimo已经具备了类似人类的步行方式,不仅能以将近9公里的时速奔跑和倒行,还能倒退走、单脚跳跃、双脚跳跃。
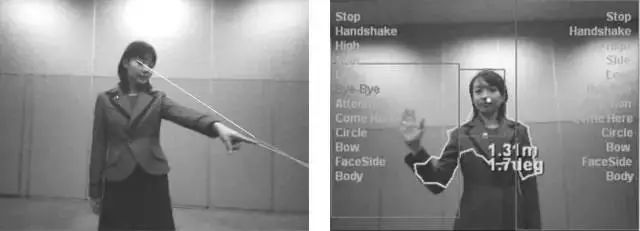
最厉害的是,走在大街上Asimo不但可以通过捕捉周围的人的位置和动作判断情况,还可以同周围的人进行沟通交流。

Asimo还可以对向其走来的人群的行动路线进行预估判断,可以大约判断出接下来几秒钟行人可能行进的路线、轨迹,通过自身的系统计算并规划出一条自己的替代路线,可避免与人类发生碰撞。

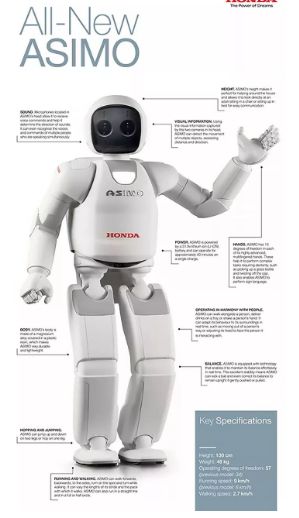
ASIMO配置有两个摄像头眼睛(视觉传感器)、由激光传感器和红外传感器结合而成的接地传感器(用于探测地面的地面上的障碍物)、可以测出周围三米范围内物体的超声波传感器和用于控制力度的压力传感器等。
Asimo可以进行踢足球、跳舞等要求整体协调性较高的一些运动。

2016年本田展示的新版本的ASIMO机器人
其最大的亮点在于手部活动的突破
据介绍,ASIMO的每只手都拥有13个自由运动轴,凭借这一点,它已经能够成为一个合格的手语表演者。
看一下视频
↓↓
同时,本田的研究人员还对ASIMO的下肢进行了改进,新版本机器人拥有更好平衡性,能够更快、更平稳的攀爬楼梯。


总的来说,ASIMO2016年已经可以完成很多类似人类活动的工作。

ASIMO罚点球的姿势与人类非常相似
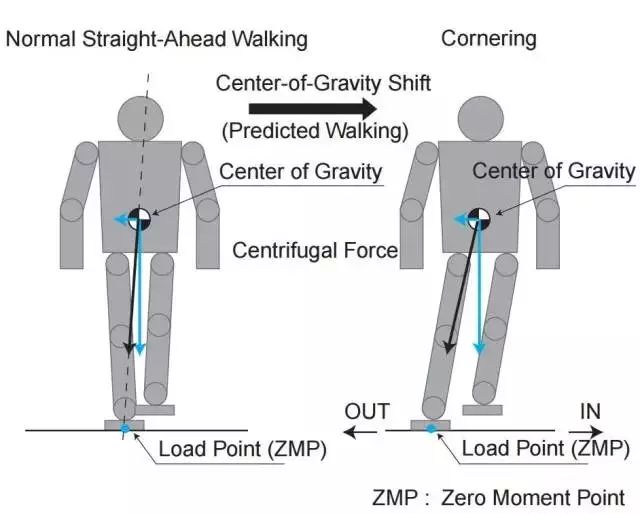
控制ASIMO的行走姿态,工程师主要实现了以下三个方面的控制:
1. 水平反应控制:在不平整的地面上运动时可以保持平衡。
2. 目标ZMP控制:当机器人不能站稳开始跌倒时,它可以向相反的方向调整自己的上半身位置以避免倒下。于此同时,它也会向前加快速度以快速平衡下降趋势。
3. 步长位置控制:当目标ZMP控制激活时,它调整机器人的步长让身体的姿态和运动速度和步长保持在正确的相对水平上。
另外,通过本田研发的I-Walk技术(智能实时灵活行走技术),ASIMO还实现了预测运动控制,让ASIMO可以根据当前速度在转弯前计算转弯的向心力,并得出最佳的转弯角度,避免机器人跌倒,因为这个过程是实时的,所以ASIMO可以不用停顿就完成转弯过程。
ASIMO机器人在各场景展示视频
↓↓
ASIMO 机器人工作场景
↓↓
要知道这都是两年前的ASIMO
看到Atlas机器人的三连跳之后
我们也很好奇
现在的ASIMO又会是一种什么情况呢
它是否实现了再次升级?

可惜
围绕可双足步行的类人型机器人研发
日本软银集团收购美国波士顿动力公司后
高运动性能的机器人Atlas的快速崛起
使得业界竞争愈发激烈
2018年6月28日
本田技研工业
正式宣布人形机器人ASIMO终止开发
科研小组也相继解散
本田将实行致力于研究更为实用的机器人技术的新方针
本田表示今后将把ASIMO研发的“遗产”:高平衡性及控制运动技术,应用于更多研发领域,如研制防摔性能的摩托车,以及具备护理功能的可装配型机器人的研发。

从走到跑
ASIMO的技术孤独领跑了30年
我们的双足类人机器人还处于低级阶段时
它已经转身离去
再见
ASIMO
☞文章来源:asimo.honda.com、新设技

机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
由IEEE(国际电子和电气工程师协会)机器人与自动化学会主办,北京理工大学等单位承办的2018年IEEE-RAS仿人机器人国际学术会议( Humanoids 2018)将于2018年11月6日至9日在北京友谊宾馆举行。大会主席由黄强教授、戴斌教授共同担任。
现已全面开启企业赞助和招展通道,强烈推荐机器人、科研仪器等与高校合作有关的企业参展。
联系人:堂博士 13810423387(同微信)
☟

IEEE-RAS仿人机器人国际会议是仿人机器人领域最权威、最有影响力的国际学术会议,从2000年开始在全球各国巡回举办,目前已成功举办了17届,会议涉及的信息具有极高的前瞻性和应用价值。2018年IEEE-RAS仿人机器人国际会议首次在中国举行。