盘点国内最具实力的双足仿人机器人研发团队有哪些?

来源:工业机器人之家
北京理工大学 黄强教授团队
北京理工大学借鉴人类长期进化所具备自然、快速、协调运动机理和灵巧结构特征,创新地研究了仿人机器人的仿生运动规划、控制与系统集成等关键技术,取得了新突破。
提出了仿人机器人运动规划新方法,首创了运动相似性评价准则,可全范围定量计算机器人运动与人体运动的相似度,解决了多自由度机器人拟人化复杂运动难题,提高了机器人运动的自然性和稳定性。
提出了快速传感反射平衡控制方法,无需机器人数理模型即可调节踝、膝、腰等关键部位,解决了复杂环境下突发扰动等平衡控制难题,显著提高了仿人机器人适应环境变化的能力和反应速度。发明了功能仿生灵巧机构,攻克了系统集成技术,解决了部件与系统性能一致性难以匹配的问题,研制成功了集成度高、运动协调能力强的5代仿人机器人。
与4代技术创新方向不同,“汇童”5代仿人机器人1.62米的身高、63公斤的体重略显瘦小,但全身30个自由度的活动能力,突破了基于高速视觉的灵巧动作控制、全身协调自主反应等关键技术,使得“汇童”5代成为具有“高超”运动能力的机器人健将。
“汇童”5代能进行乒乓球人机对打。两台机器人对打的最高次数达到200多回合,堪称成为机器人“国球手”。作为国际首创技术,“汇童”5代是世界仿人机器人领域的一项重大突破。
项目负责人黄强教授“因在仿人机器人设计和控制方面的贡献”当选美国电子电气工程师学会会士(IEEE Fellow)。
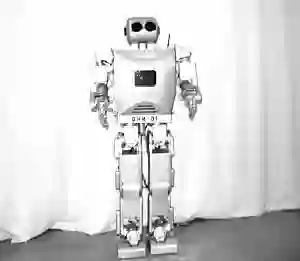
陕西九立机器人制造有限公司
陕西九立机器人制造有限公司是一家制造特种机器人的高科技公司,公司主要是以特种机器人的研发、加工、生产制造和销售为一体。其产品包括9号双足机器人(下图),国内第一个1:1仿人型“智童机器人”、人型双足“易”机器人以及全世界最大的载人“钢弹”机器人等。
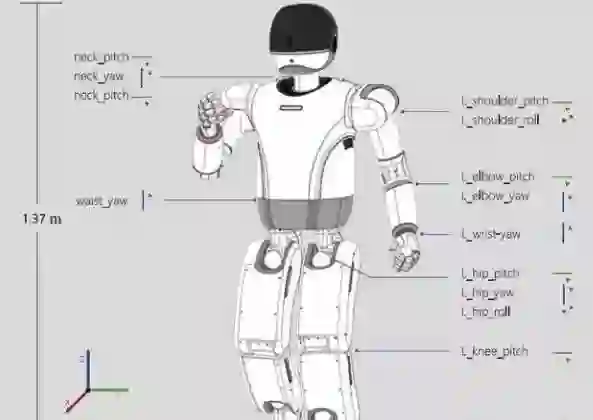
深圳优必选有限公司
在CES 2018上,我们预见了Ubtech将于2019年推出的“人形机器人管家”Walker 。虽然它没有双臂,但是双脚已经相当灵活,陪你踢个球也不在话下。Ubtech是一家扎根于中国的机器人企业,此前推出过大量的家用和玩具机器人产品。

Walker高1.3m,拥有两条自由度极高的腿,可以上下楼梯、全向行走,具备踢球、跳舞等多种互动运动能力。此外,Walker机器人还配备了麦克风、高清显示屏、摄像头和传感器等设备,具有语音交互、导航避障、安全监控、视频通话等功能,可以使用手机APP或语音两种方式交互。它主要放在室内使用,可以用来播放音乐、询问天气、咨询新闻、闲聊、即时视频通话,或者是远程监控,教育、陪护小孩以及控制智能家居等。
在运动能力方面,Walker机器人具备全方向自由行走、稳健爬坡以及平稳上下楼梯能力,扩展了其在室内的运动能力。此外,Walker机器人采用了优必选自主研发的新一代基于三维视觉的定位导航系统——U-SLAM,在双足机器人自主运动的过程中,其不仅可以实时定位、路径规划与动态避障等,领先的防抖算法还能有效的解决由本体运动引起的视觉抖动问题。
浙江大学 熊蓉教授团队
熊蓉教授,浙江大学工业控制技术国家重点实验室教授、博导,智能系统与控制研究所机器人实验室主任,曾获得世界级机器人足球比赛冠军。
你可能已经习惯了美国波士顿动力公司在机器人领域又搞出一些新花样,但这次,是浙江大学熊蓉教授领导的机器人团队给我们带来了新花样。项目负责人、浙大控制学院、浙江大学工程师学院朱秋国说:“‘绝影’的表现表明,中国的四足机器人技术已经能够接近国际一流水平。”

最终历时4年多研制的“悟”、“空”集成了机器人领域的诸多先进技术:身躯采用了高强度轻质材料和加工工艺,全身有30个关节,仅手臂就能做7个自由度的运动。

哈工大机器人研究所 付宜利教授团队
付宜利教授是哈工大机器人研究所副所长、生物医学工程中心主任、机器人国家重点实验室副主任,中国人工智能学会理事,工信部重点实验室学术委员会委员。他注重在机器人技术与生物医学工程领域开展创新性研究。研制了我国首个大型机器人机构仿真系统;在国内首次建立了空间智能机器人地面实验平台仿真系统;基于现代循证医学和康复医疗连续被动理论,研制了世界首个手指创伤康复仿生机械手;研制了我国首个心血管介入手术机器人系统、腹腔微创手术机器人系统、液压驱动双足机器人系统。
北京钢铁侠科技有限公司
自上世纪六七十年代起,双足大仿人机器人的研究就已开始,并在军事及一部分工业场景中被运用。近年来,随着被Google收购Boston Dynamics ,后者的双足行走机器人Atlas 才被普通大众所关注。而在国内,虽然也有少数高校研究过,但还停留在科研阶段,鲜有考虑商业化,也给国内基于人形机器人的研究带来了种种不便。

钢铁侠科技成立于2015年,利用两年的时间研发了三代仿人机器人。与其他已经实现量产的服务机器人不同,钢铁侠重点研发大型双足仿人机器人的本体、“运动”以及核心零部件。
双足机器人在运动状态下的平衡及稳定性一直是业界的难题之一,即使在目前的DARPA机器人挑战赛中,仍有不少机器人会在碰到障碍物时摔倒。因此,商业化前景也不甚明朗。

硬件上,钢铁侠科技并没有采用Atlas的液压驱动方案,而是自研了全套的电机驱动方案。之所以选择电机驱动方案,主要是因为Atlas为代表的液压驱动方案,噪音大、功耗高,并不太适用于工业机械以外的领域。
此外,Atlas的结构部分要依赖于高精度的金属3D打印机打印,很难标准化,这就意味着很难量产。为此,团队研发了高精度、无噪音的电机驱动,采用智能算法,可以智能适配多种型号的电机。
要让机器人像人一样行走,这个过程可以拆分成环境感知、步态规划、步行控制等几个环节。这其中,控制算法就是核心。钢铁侠科技采用了自研的姿态传感器、位置传感器,配合视觉、力觉等模块,可以满足机器人组合导航和步态、平衡控制的需求。
同时采用了高速电机制成,行走速度可以自由调节,自带电源,可以连续工作四小时。为了提供更为通用、可靠的开发环境,团队采用了目前市面上最为普及的ROS机器人操作系统。
先进制造所
中国科学院合肥物质科学研究院先进制造技术研究所(以下简称先进制造所)是中国科学院合肥物质科学研究院下属的研究单位之一。
先进制造所研发的“智能先锋号”类人机器人获得美国国防部DARPA举办的“先进机器人挑战赛”的预赛资格;无人车在“中国智能车未来挑战赛”中,连续四年进入前三名;研发的国内首台“老人服务机器人、欠驱动仿人机器人手爪、高精度金属分离器、面向高速高精作业的混联机器人”等通过成果鉴定,达到国际先进水平。
仿人双足机器人项目来源于中科院合肥物质科学研究院“十二五”重点培育方向项目。该机器人是一种以实施危险环境救援为目标的类人型机器人,本项研究以人类功能和结构为基本仿生对象,通过研究人类高度的运动灵活性、环境自适应性和负重作业能力,研制出能够在复杂环境条件下执行作业的机器人系统。
2013年研发的“智能先锋号”仿人双足机器人在全世界100多个队中,获得参加美国国防部DARPA举办的国际机器人挑战赛(DRC)资格,实现了整个机器人系统有机集成,突破环境识别、自主行走、任意抓取等多项关键技术。

乐聚机器人技术有限公司
乐聚机器人成立于2016年3月,总部设在深圳,主要由哈工大研发机器人的团队构成,研发类人形机器人,推出Aelos、Talos等系列机器人,面向教育和服务机器人两大方向,前者负责短期变现,后者主打未来布局。
目前乐聚机器人主打基于Aelos的教育产品线。Aelos定位面向儿童和极客,主打的是增强用户粘性,既可以娱乐,又可以学习编程。
Aelos的一大卖点是高灵活性,有17个自由度,可以在程序控制下做出各类动作,包括比较难的推倒后自己爬起来,以及快速向前行走。快速双腿交替向前行走看起来很简单,实际上背后涉及到很多步态研究、舵机的电机控制曲线等很多技术;乐聚机器人自己设计了Aelos的舵机,在寿命、性能方面都很好,可以和国外产品PK,但价格则是和国产舵机差不多,而且已经实现了量产。
乐聚机器人团队成员此前有人此前曾参与中国版机器大狗的设计,舵机的设计借鉴了类似的技术。

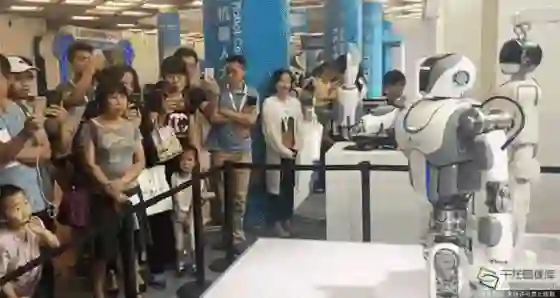
上海荷福人工智能集团
上海荷福人工智能集团是由荷福控股集团整合旗下荷福机器人等六家人工智能企业组建而成,具备为多行业提供个性化人工智能服务的综合技术能力,是中国人工智能机器人行业中的领军企业。
其最具有代表性的机器人产品就是荷福人型直立行走机器人,它是继美国和日本之后,世界上第三个也是中国唯一的拥有双足直立技术的机器人。
荷福人工智能集团有七款机器人亮相了2017世界机器人大会,分别是:基于多模态建模一比一高仿真姚明,可灵活投篮的姚明投篮高仿真机器人;采用仿人行走步态控制方式,行走流畅的双足直立行走机器人吴小欢;具有自主避障、人脸和语音识别等十大综合功能的多功能服务机器人小福;拥有高速运动目标捕捉、自主避障、多机协同等功能的羽毛球机器人;通过语音,就可以控制家里所有家居设备,基于云计算和大数据的知你、懂你、为你的智能家居机器人福娃;通过采集人的脑电波信号,将其转为控制指令,对虚拟人物、智能硬件进行控制的脑电波机器人;通过基于深度学习的人脸检测和跟踪算法,实现实时人脸抓取,目标人脸库搜索比对的人工智能人脸识别机器人。

未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”






