苏黎世联邦理工学院,让双臂机器人YuMi学会控制提线木偶

导读
近日,苏黎世联邦理工学院,让ABB的双臂机器人YuMi学会了控制提线木偶。虽然这在大多数人看来是徒劳之功,但对于苏黎世联邦理工学院的研究人员来说,这将为双臂机器人学会更复杂的操作奠定了基础。
编辑:小木
虽然现实生活中并没有亟需让机器人学会操作提线木偶,但是在苏黎世联邦理工学院的研究人员看来学会操作牵线木偶,会为它们将来学会操作复杂的物体,比如衣服和柔性床单等。他们将这个操作牵线木偶的系统称为PuppetMaster系统。
PuppetMaster系统包括三个主要部分:机器人木偶操纵者的运动学描述; 机器人可以操作的定制设计的弦驱动牵线木偶; 和目标牵线木偶运动系统的任务重现。
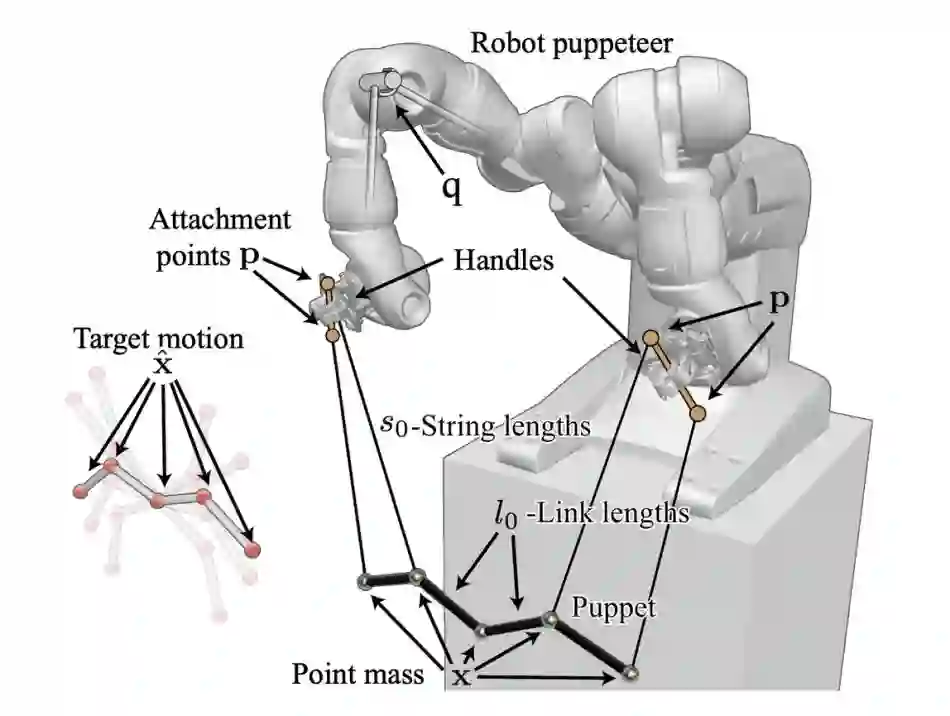
需要指出的是,这实际上是一件非常复杂的事。首先,牵线木偶是低欠驱动,高维,高度非线性耦合摆系统。一个典型的牵线木偶由不同的力量驱动,例如重力,人体操作通过弦线的张力和内力; 第二,木偶操作者的行为与牵线木偶的动作之间没有直观的联系。因而掌握牵线木偶的操作,组要重复不断的练习。

苏黎世联邦理工学院开发的PuppetMaster系统,利用前向动力学模拟产生的运动衍生物来预测机器人的行为将如何影响牵线木偶的运动。研究人员采用二阶灵敏度分析来表达牵线木偶和机器人的运动轨迹之间的关系,并建立了一个基于物理的仿真模型,以帮助牵线木偶和机器人实现目标运动。
研究人员开始进行一些初步测试,例如将钟摆放在杯子里,同时避开障碍物。看似简单的动作,但是障碍物的位置不同,用力的角度和力的大小都会有很大不同。这需要经过不断的测试与模拟。
这之后,他们逐渐提高了控制的难度。比如控制一只燕子。研究人员还优化了机器人设计元素,如手柄配置,以使对更好地实现目标运动。
再之后,他们还让PuppetMaster系统学会了控制四足机器人。在这里也能看出这套系统的弊端,实际操作和仿真结果有时候并不能完全一致。


虽然这项研究为未来的机器人木偶操作奠定了良好的基础,但研究人员承认仍有待改进的领域,例如上文所说的模拟与现实世界结果之间的差异。木偶运动的范围和细微之处也很大程度上取决于机器人系统的设计方式。到目前为止,机器人只能在循环中执行迭代运动,研究人员希望在未来探索开环牵线木偶。
机器人木偶操作背后的含义超出了娱乐范围。将机器人的灵活性提高到人手的水平,开启了各种类型工作自动化的潜力,例如在家折叠衣服或在酒店铺床,在建筑工地上使用大锤等等。
有关PuppetMaster系统的详细信息,可以点击下面链接:
http://crl.ethz.ch/papers/puppetMaster.pdf
END
招聘内容编辑
为更好的服务于广大粉丝,提供更优质全面的机器人行业内容,现机器人大讲堂面向粉丝招聘内容编辑一职,具体要求如下:
工作内容:
关注机器人领域前沿科技、行业动态和热点事件,负责机器人大讲堂原创内容生产、热点事件深度报道、行业专家企业家深度采访等。
岗位要求:
1、有工科背景或从事工科编辑背景,机器人方向优先;
2、文字功底较好,有新媒体编辑思维,具有一定语的翻译能力,对视频剪辑有一定的基础;
3、具有创业精神和责任心,沟通能力强,踏实肯干;
4、如应届生需毕业于知名重点大学。
薪酬待遇:
不低于行业标准的薪酬福利
五险一金+补贴
与国内外一线大咖、行业翘楚面对面交流的机会
简历投递:
投递邮箱:670749331@qq.com
联系电话:1560008967
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!

看累了吗?戳一下“在看”支持我们吧!




