ECCV发布:228页教程全面理解视觉定位技术
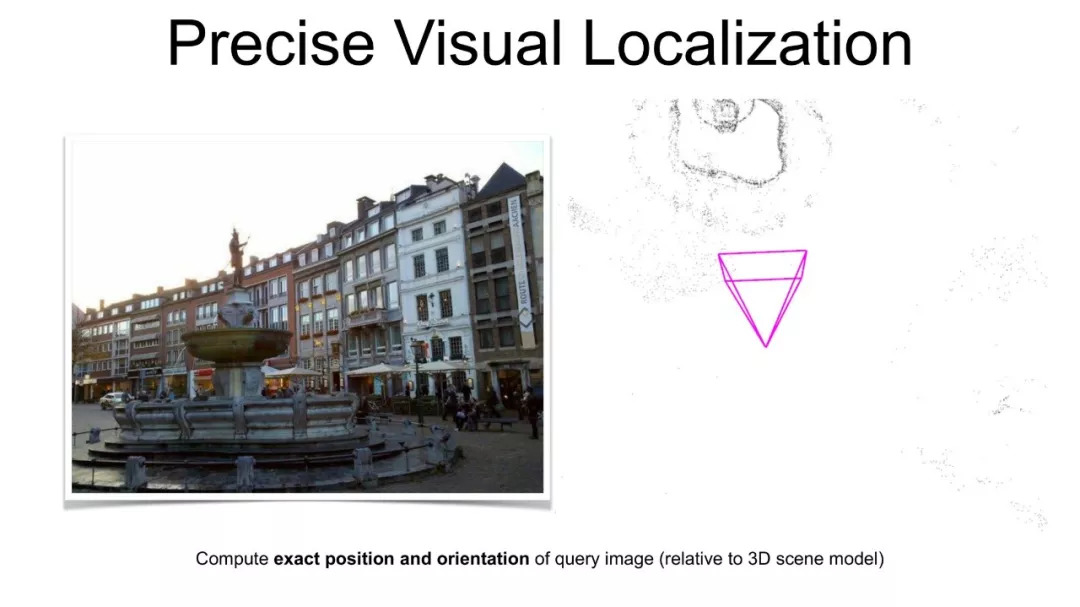
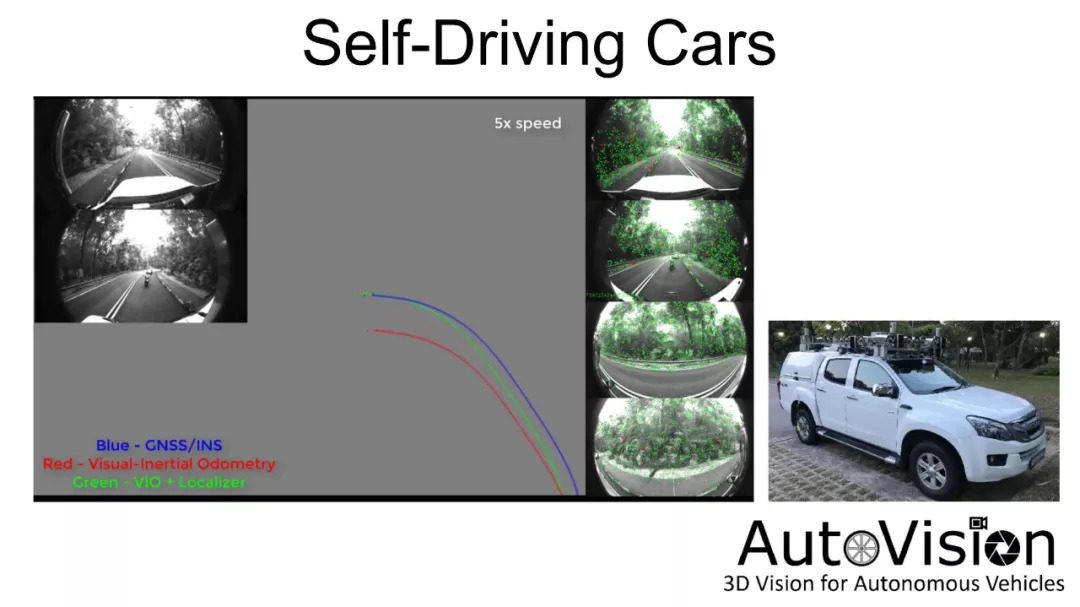
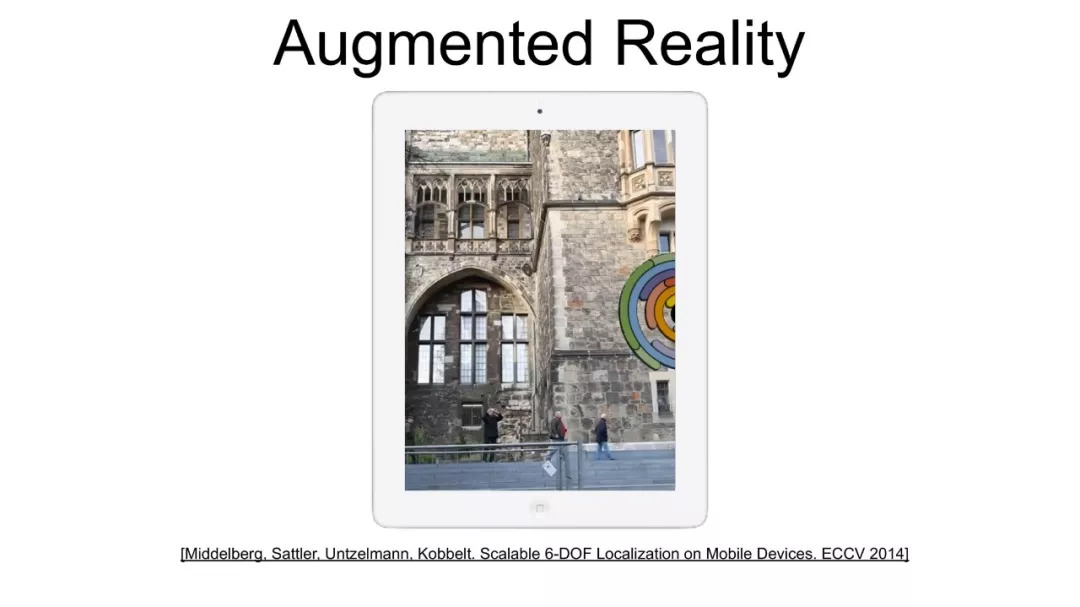
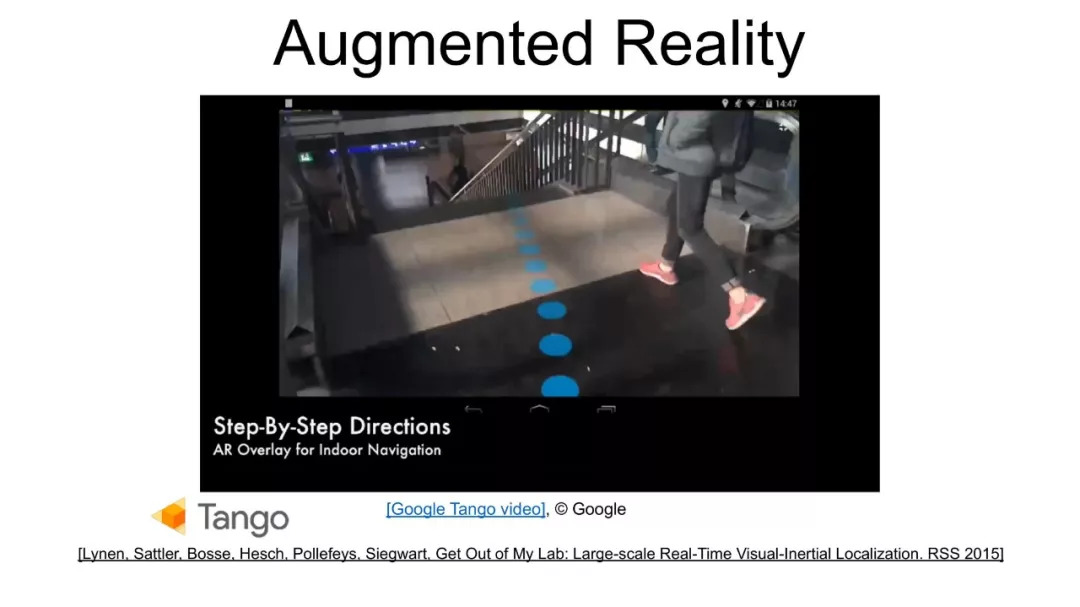
【导读】视觉定位问题是近些年来计算机视觉领域的研究热点,同时非常具有挑战性,其在机器人视觉导航、公共场景监控、增强现实、交互虚拟现实、智能交通等诸多领域都具有十分重要的意义。
本教程完整的涵盖了该研究问题的主要方向,按照基于特征的定位方法与基于学习的定位方法对该问题进行了概括性介绍,并在最后探讨了该领域的主要问题以及未来的发展趋势。
作者简介:
Eric Brachmann,海德堡大学的研究人员,他的主要研究方向为:计算机视觉、机器学习、物体姿态估计、相机定位。

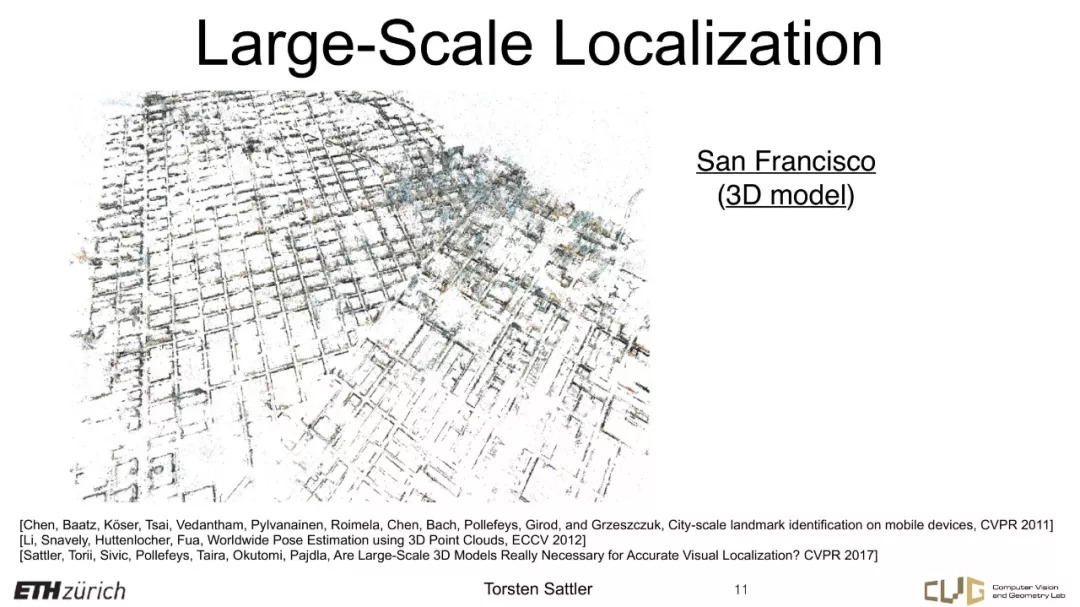
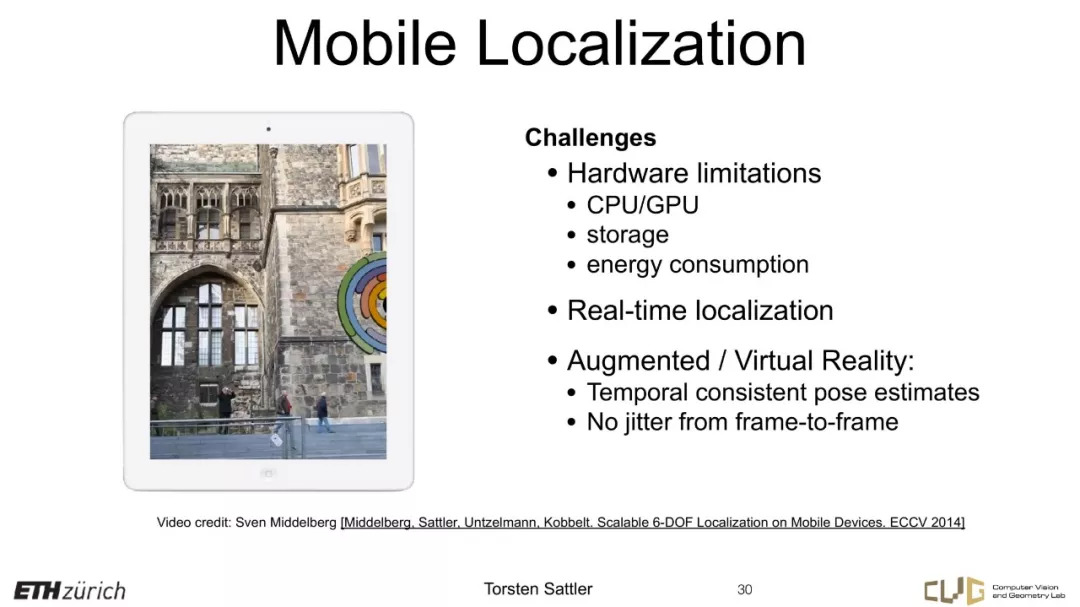
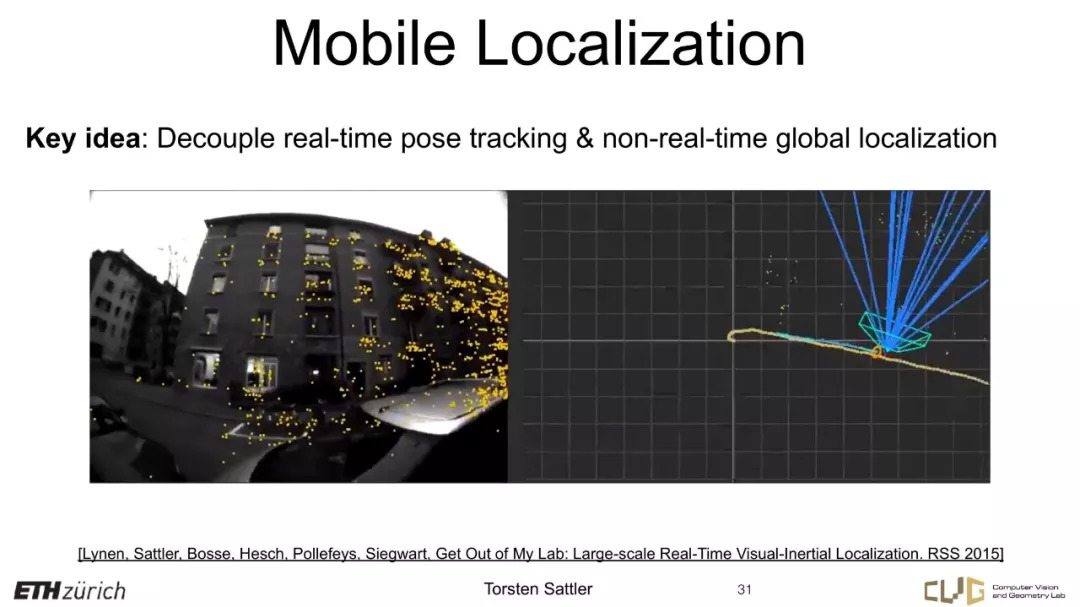
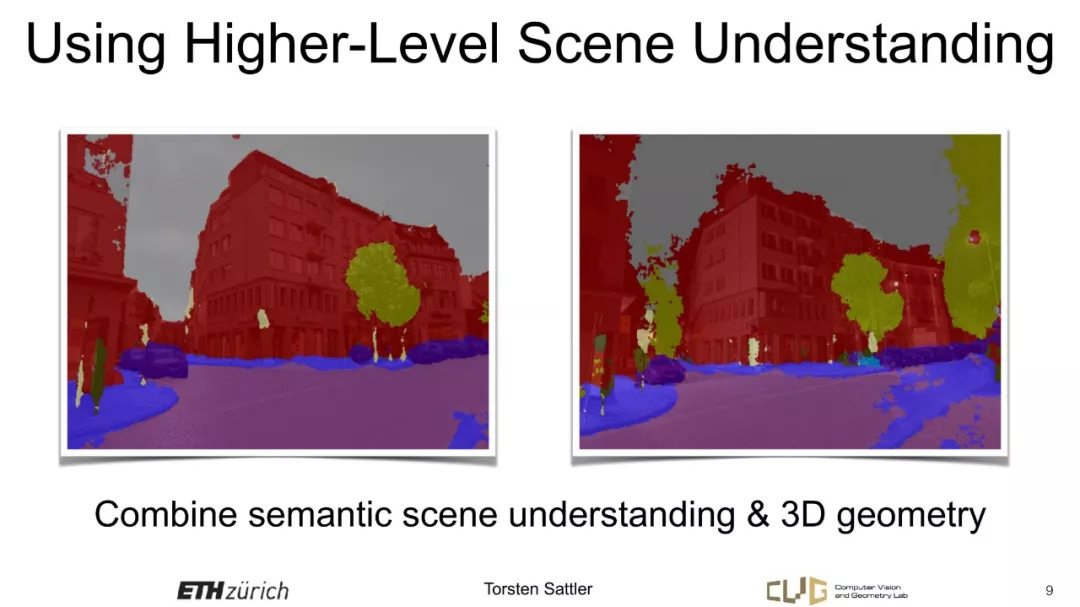
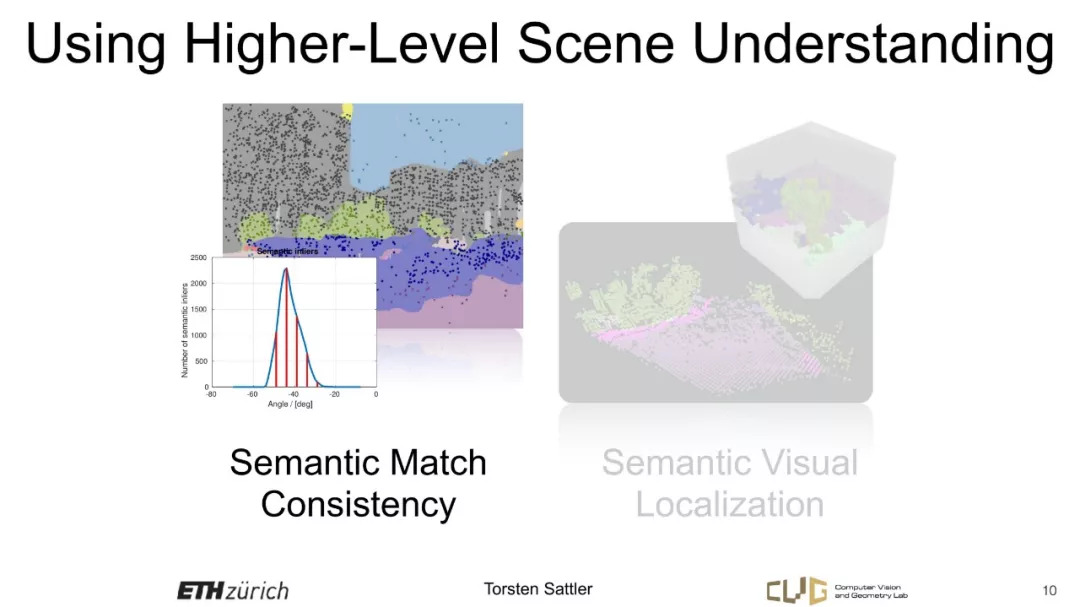
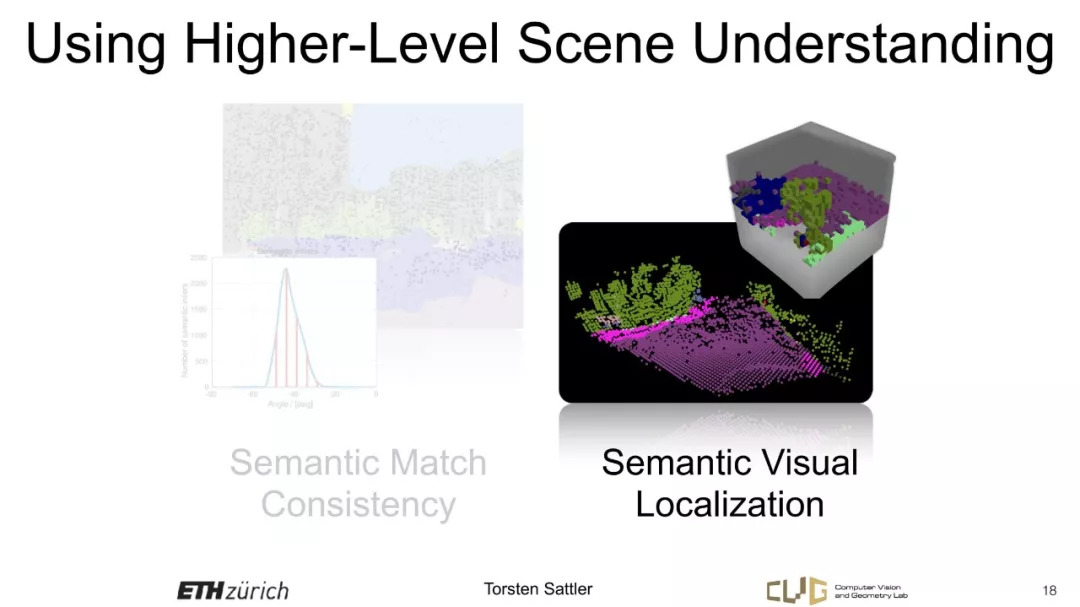
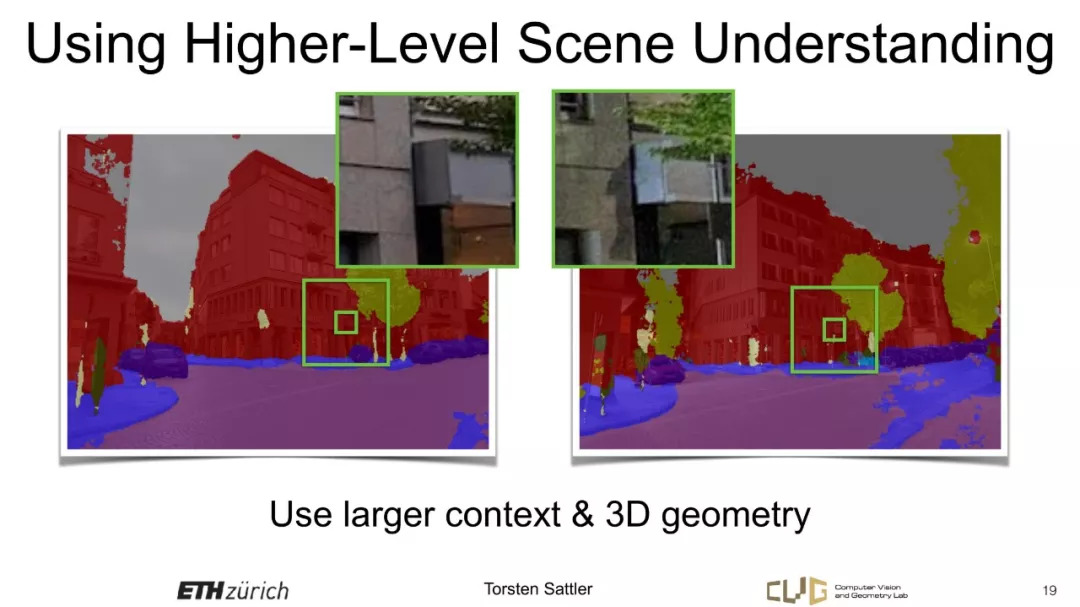
Torsten Sattler,苏黎世理工学院的研究人员,他的研究兴趣包括:基于图像的大规模点云定位、移动设备实时定位、3D mapping 、SLAM技术、增强型虚拟现实、机器学习、相机校准与姿态估计,目前的工作重点是通过结合更高级别的场景理解,使定位和mapping算法更加智能化。

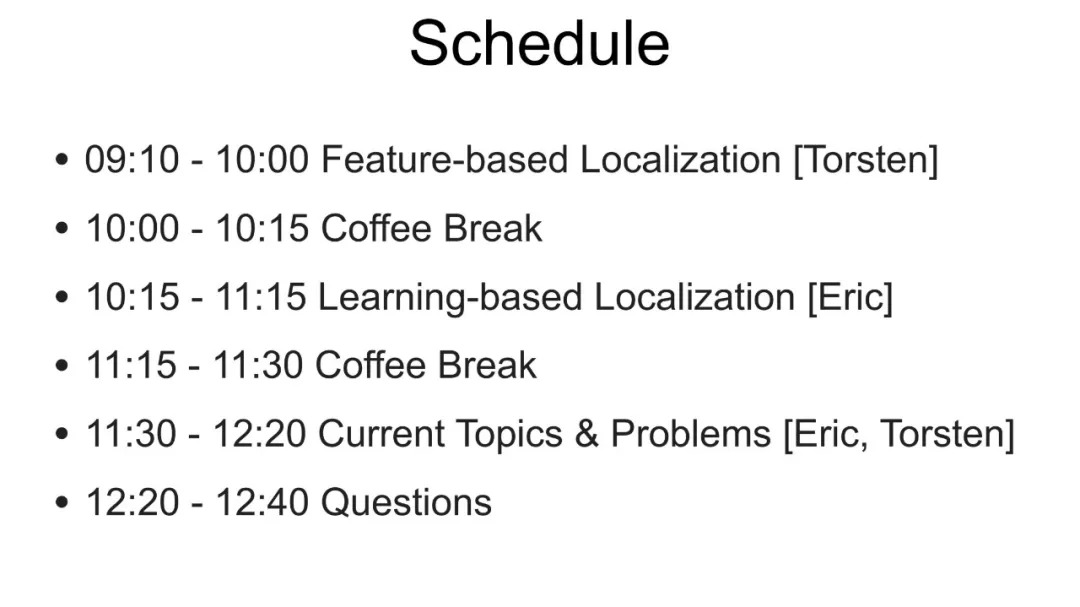
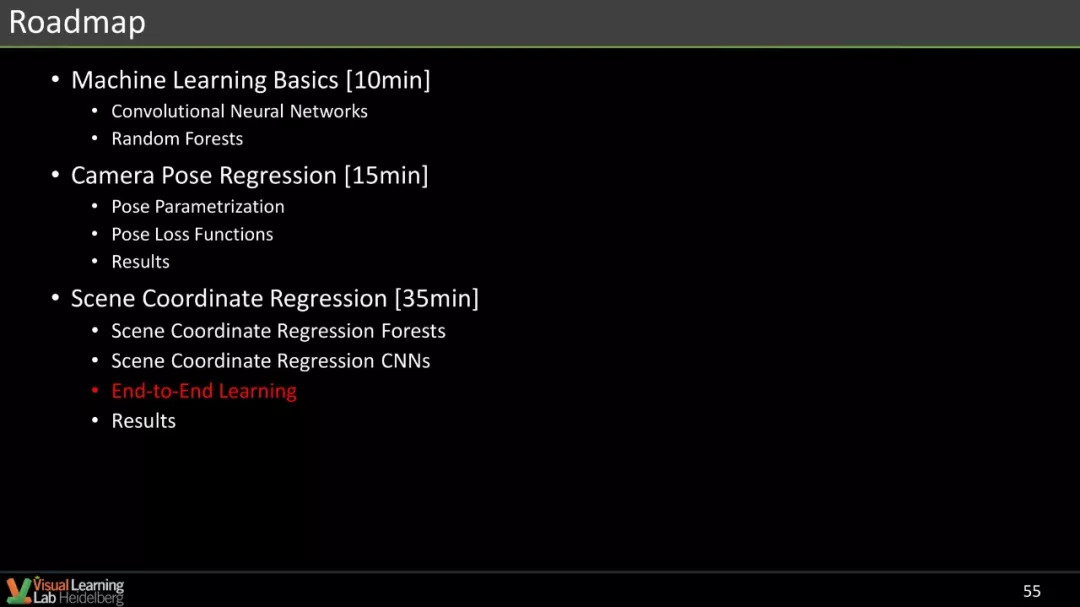
教程大纲:
介绍
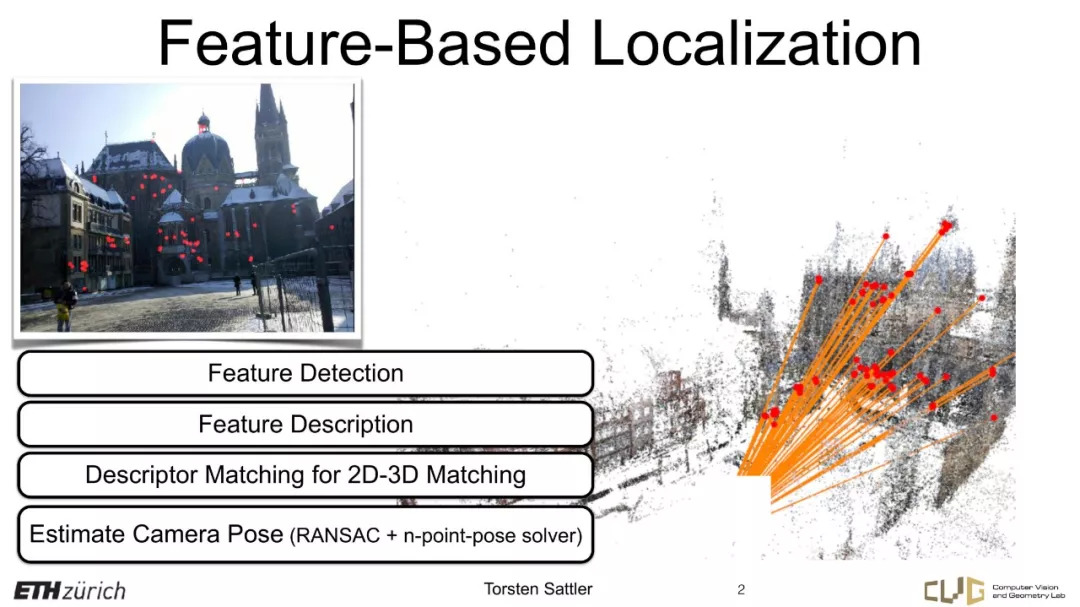
基于特征的定位方法研究现状
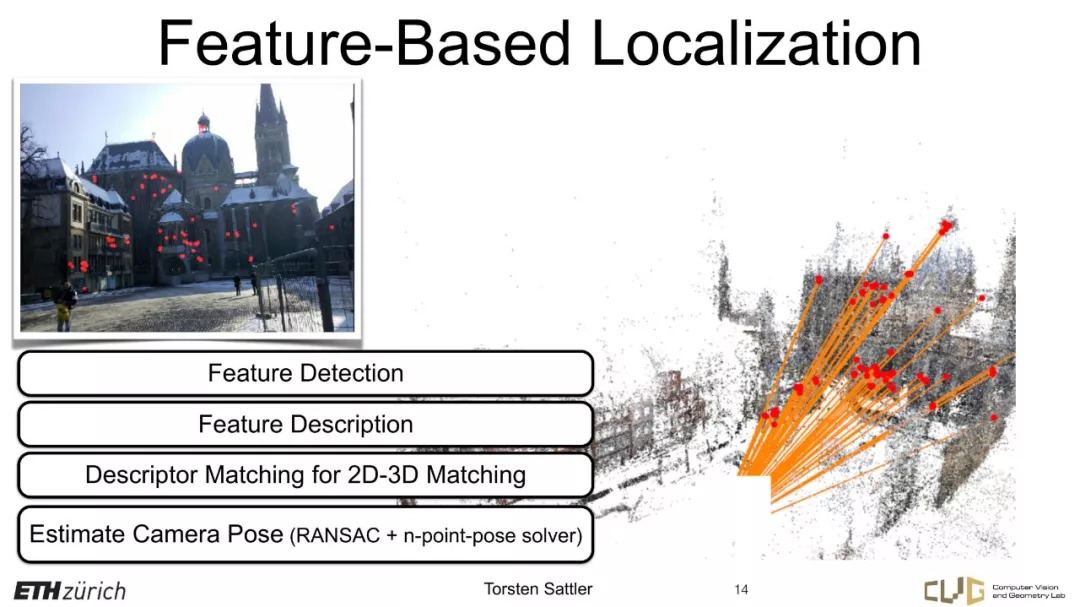
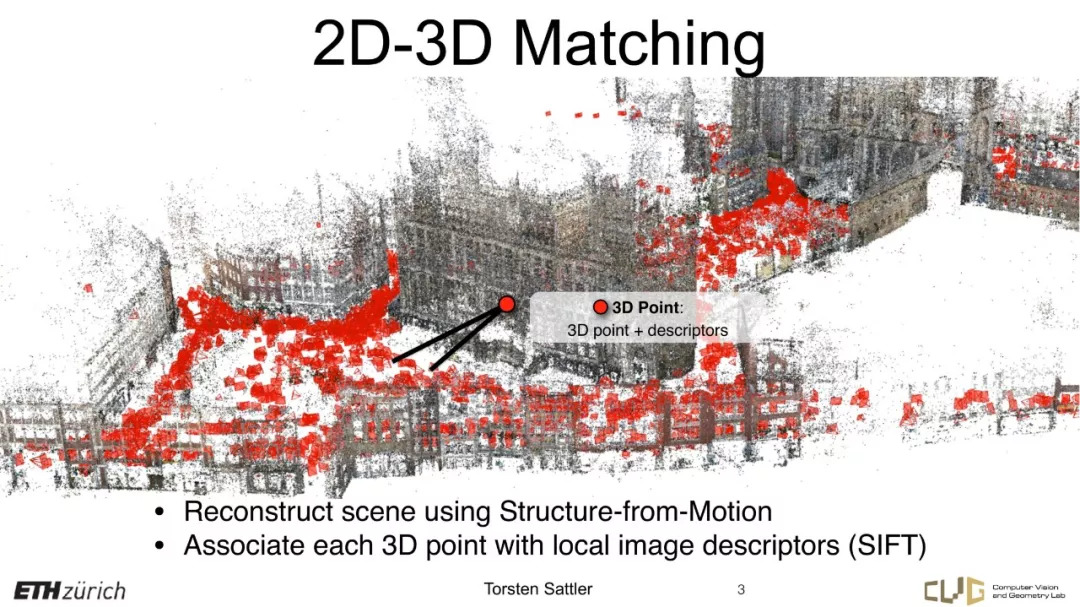
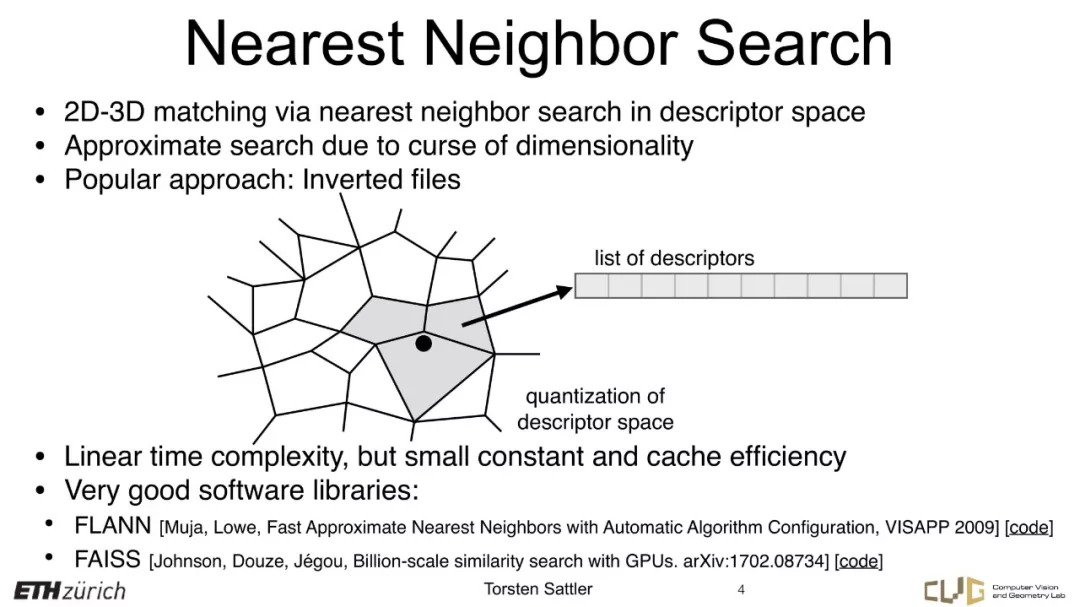
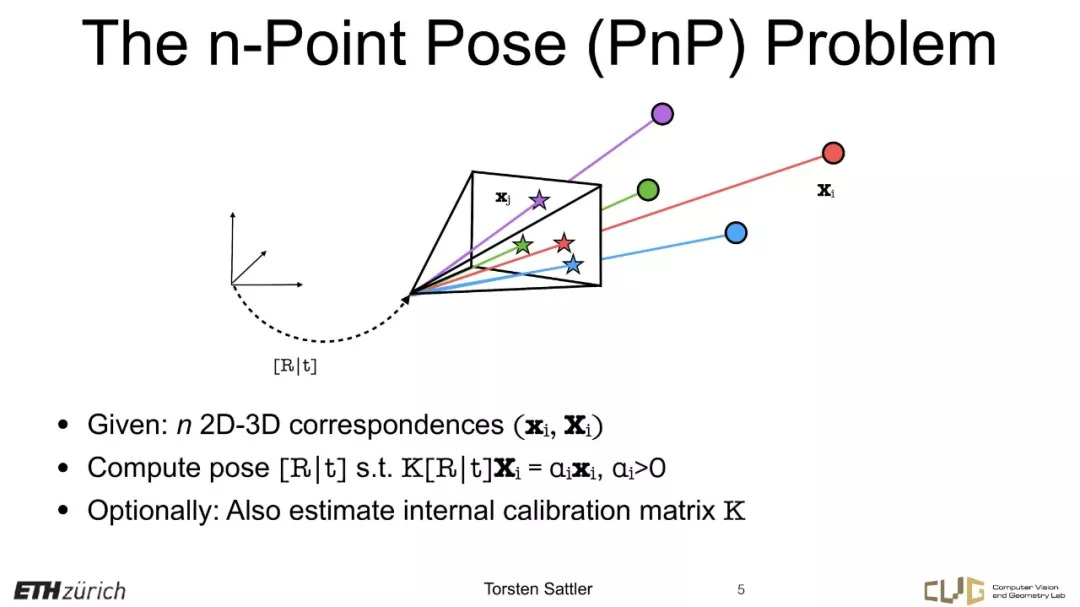
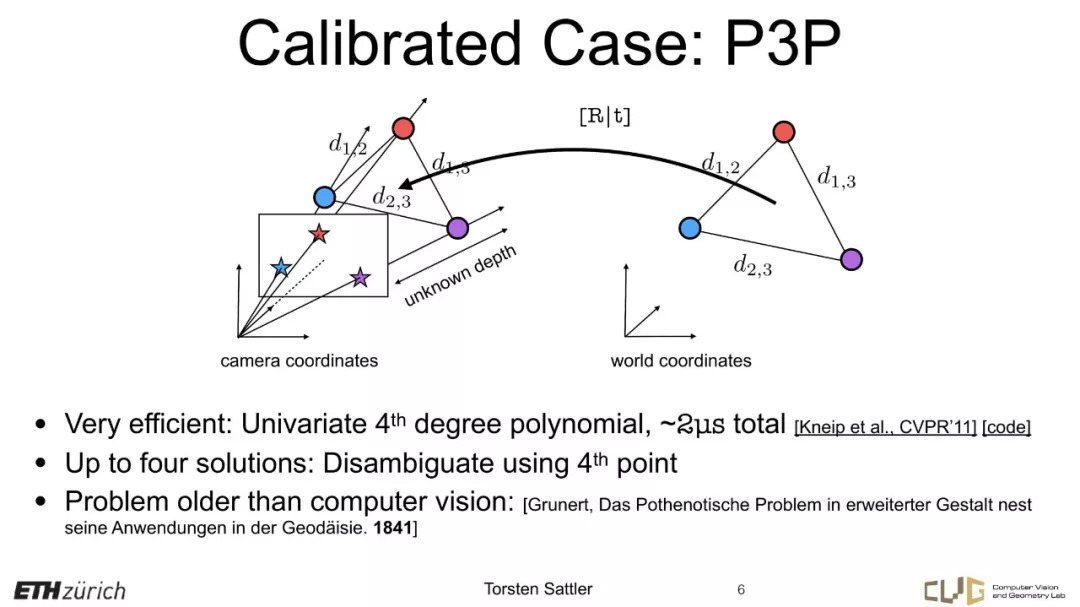
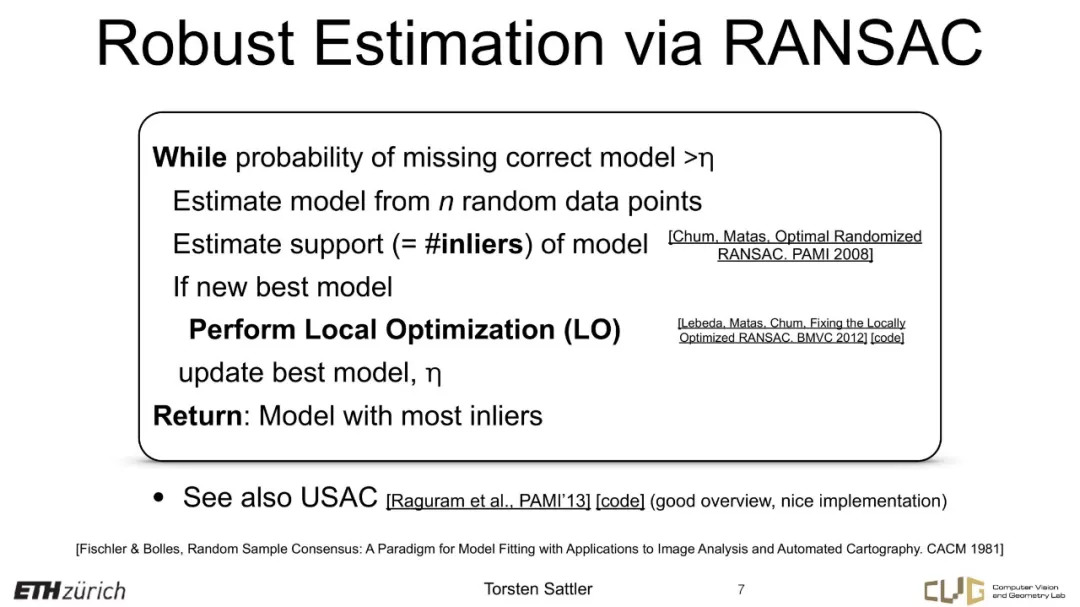
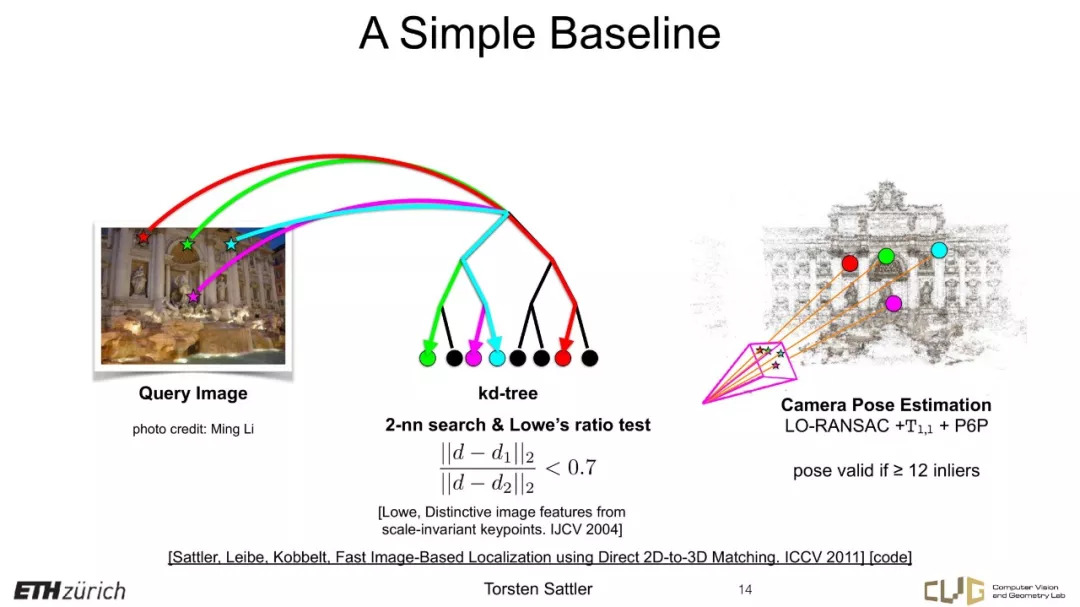
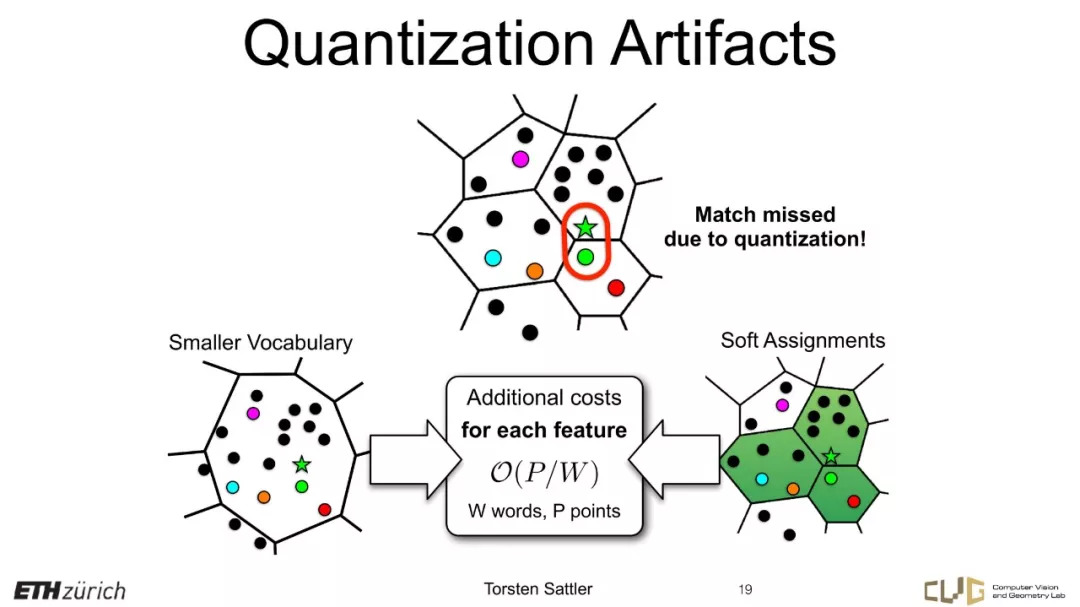
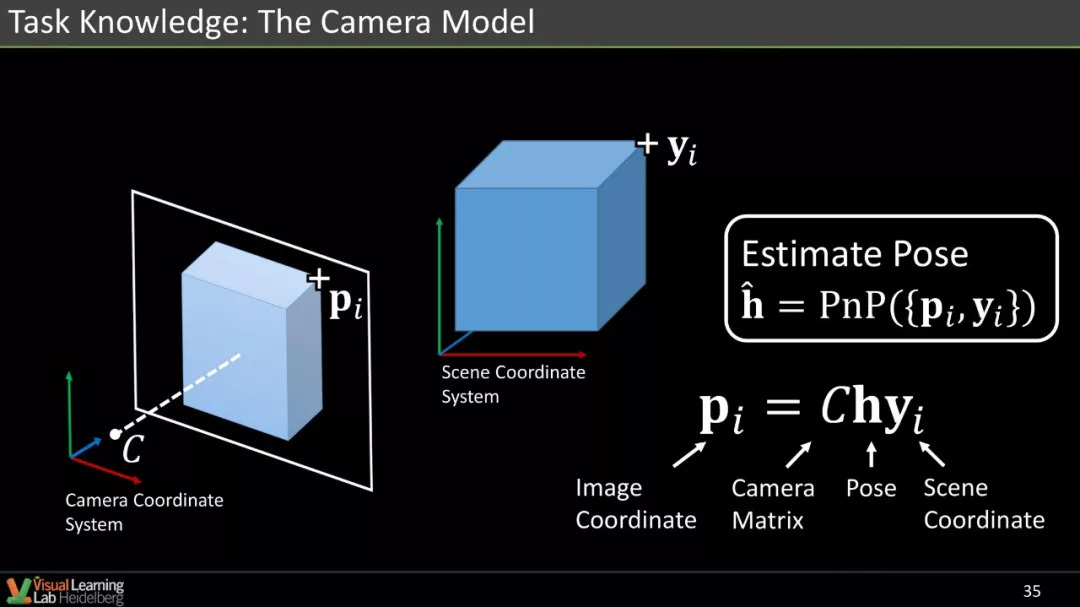
基础知识:局部特征、相机姿态估计、描述符匹配
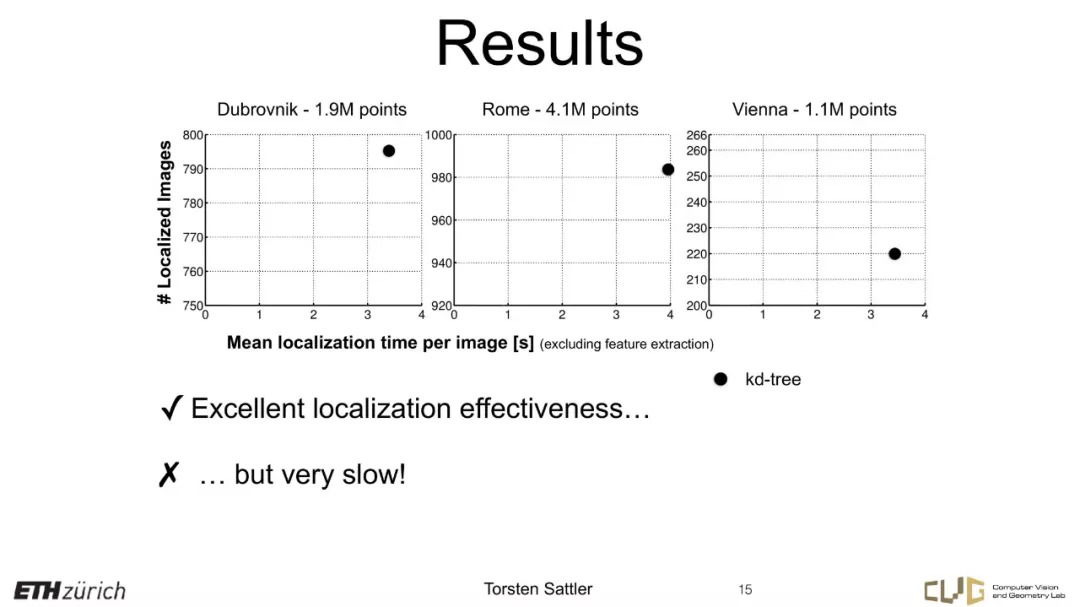
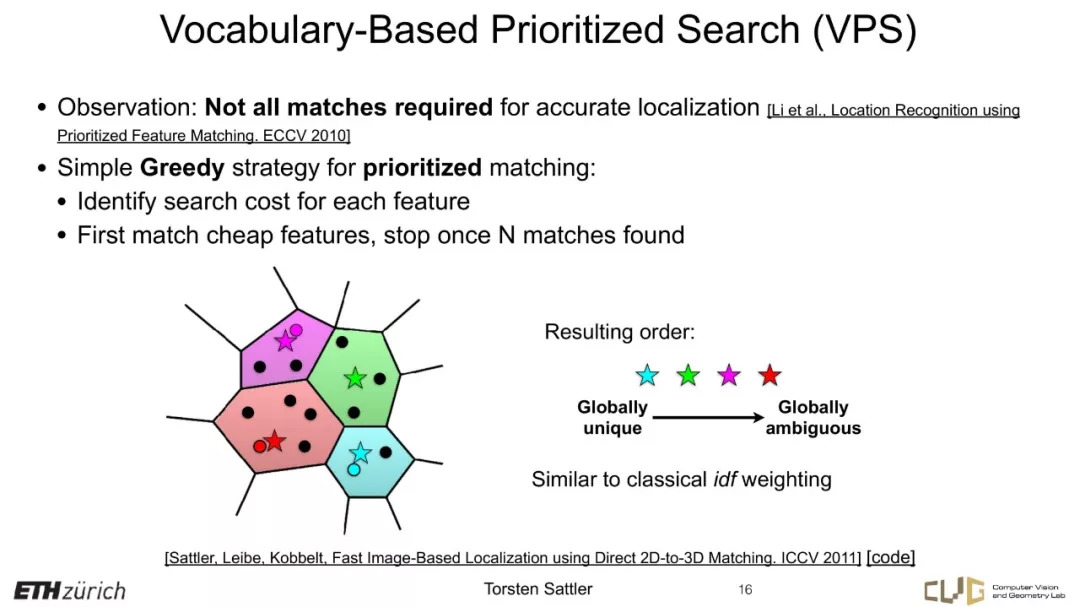
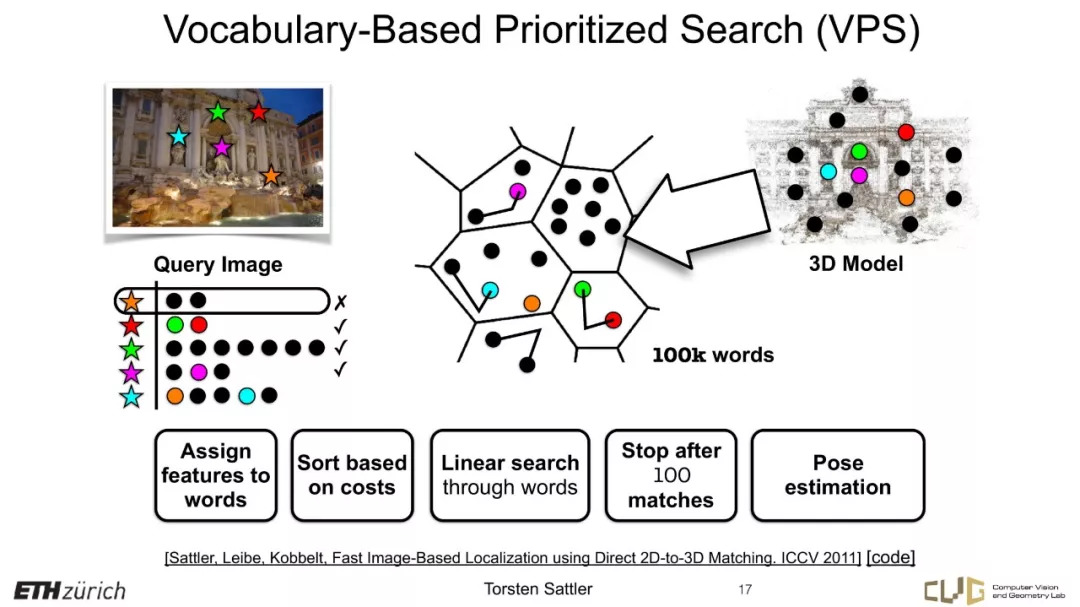
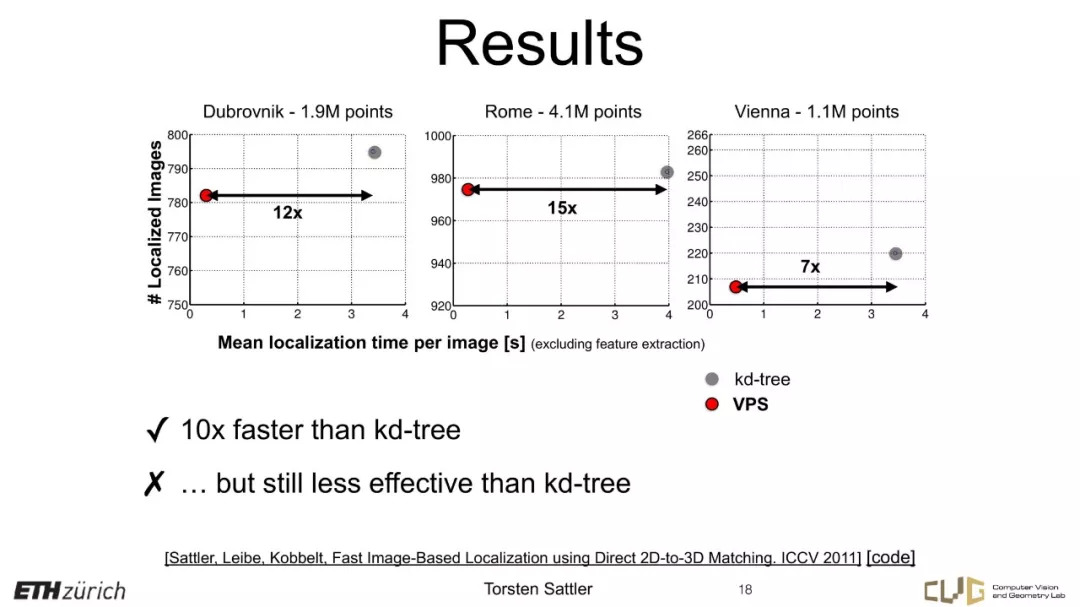
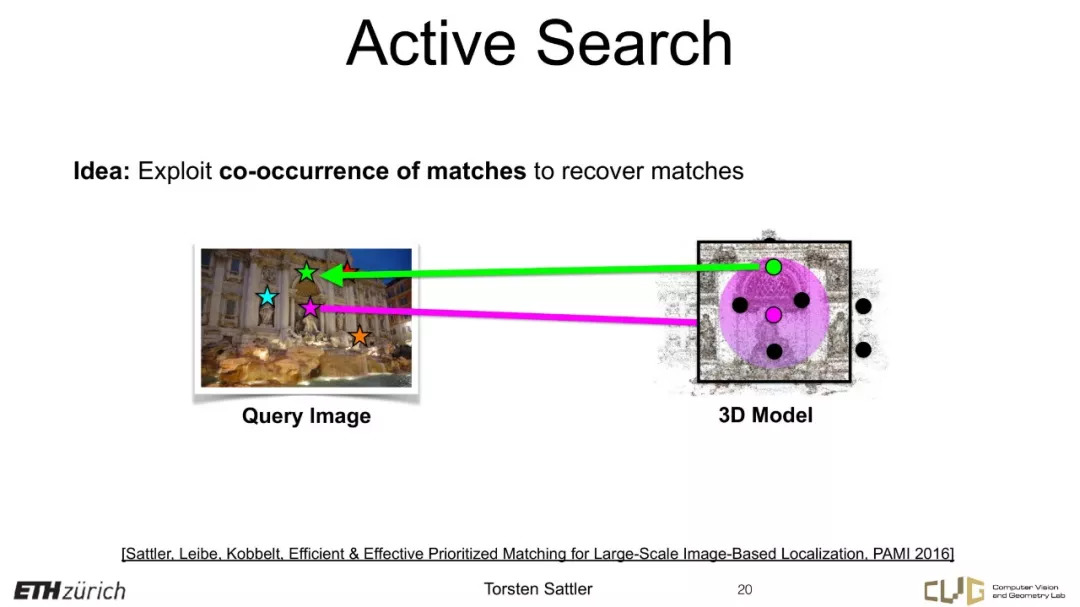
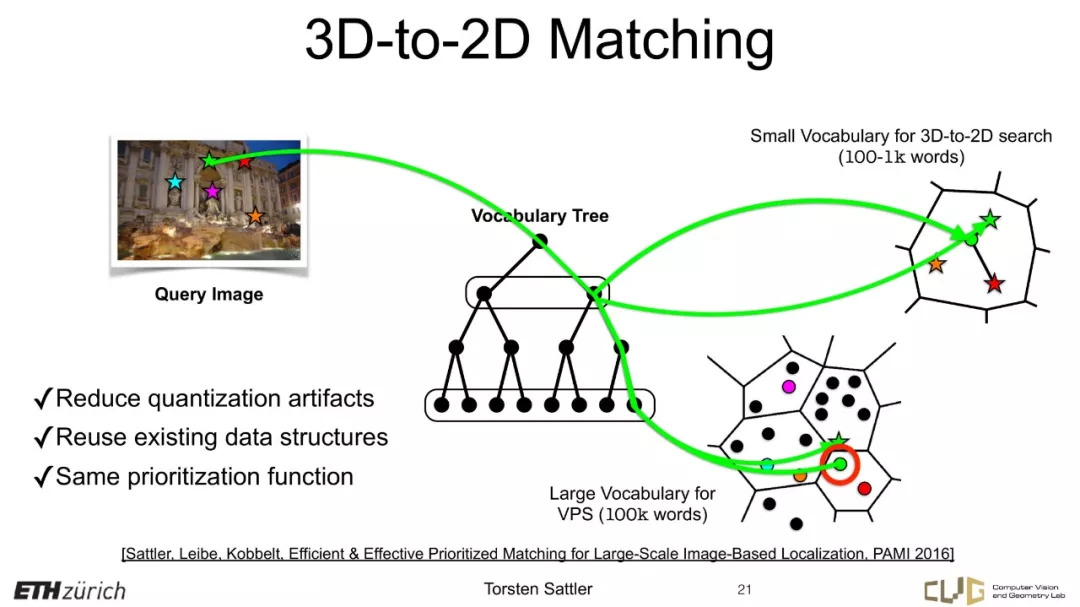
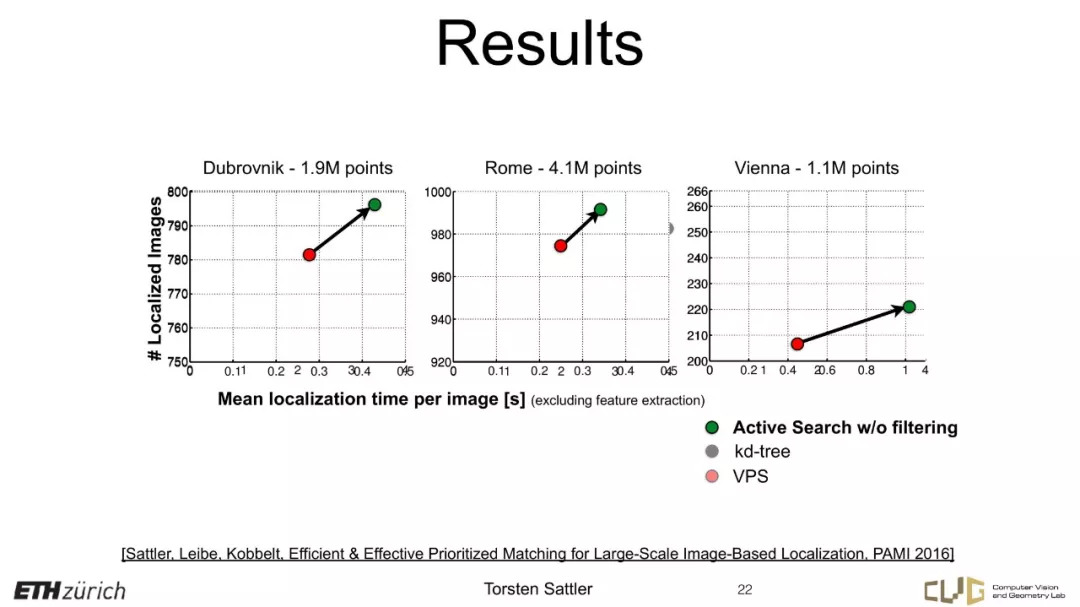
高效定位
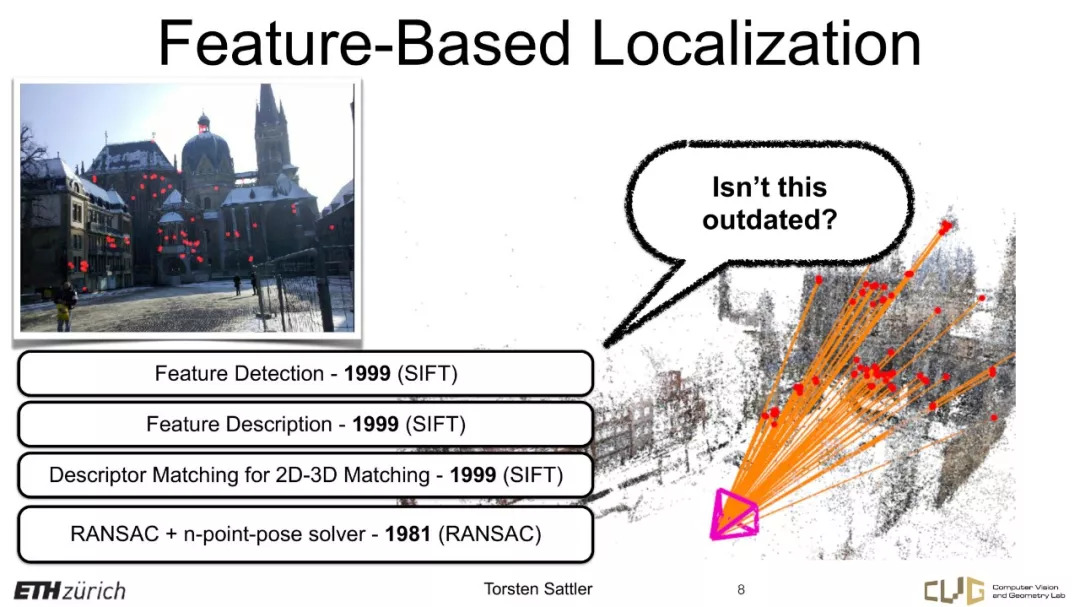
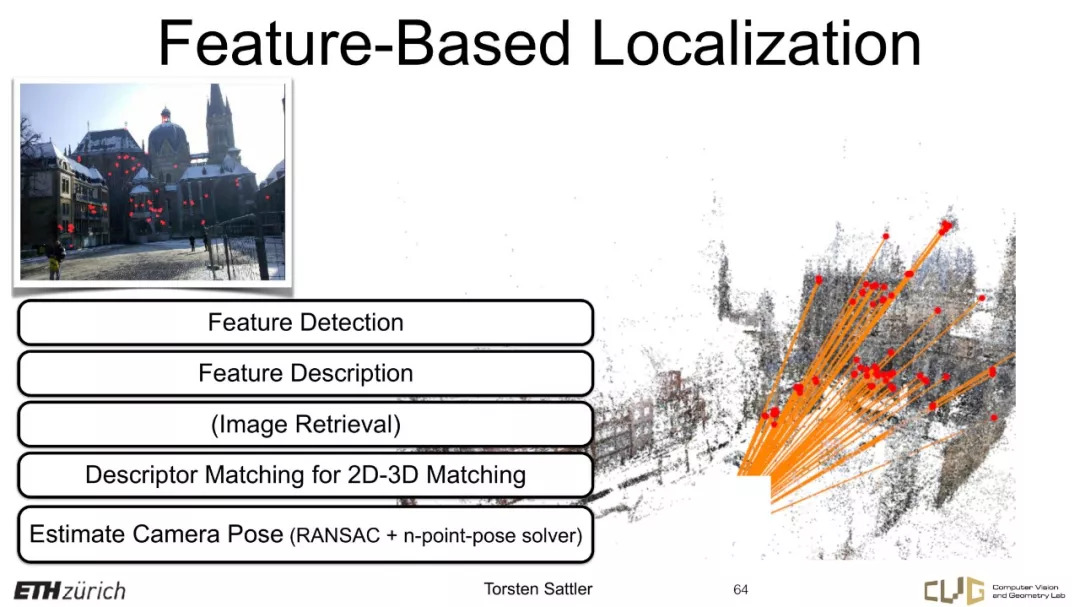
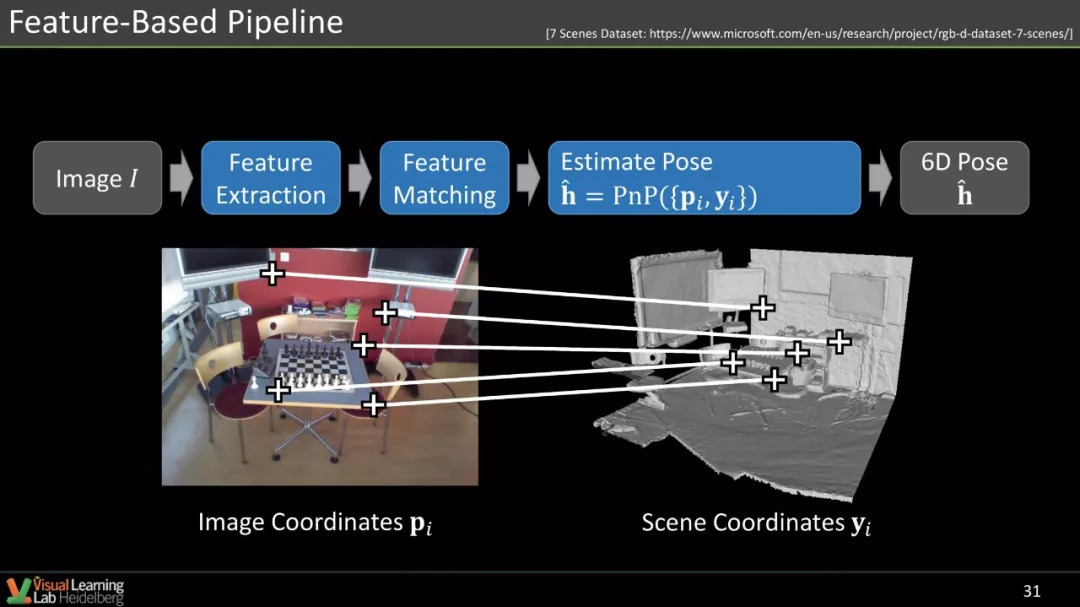
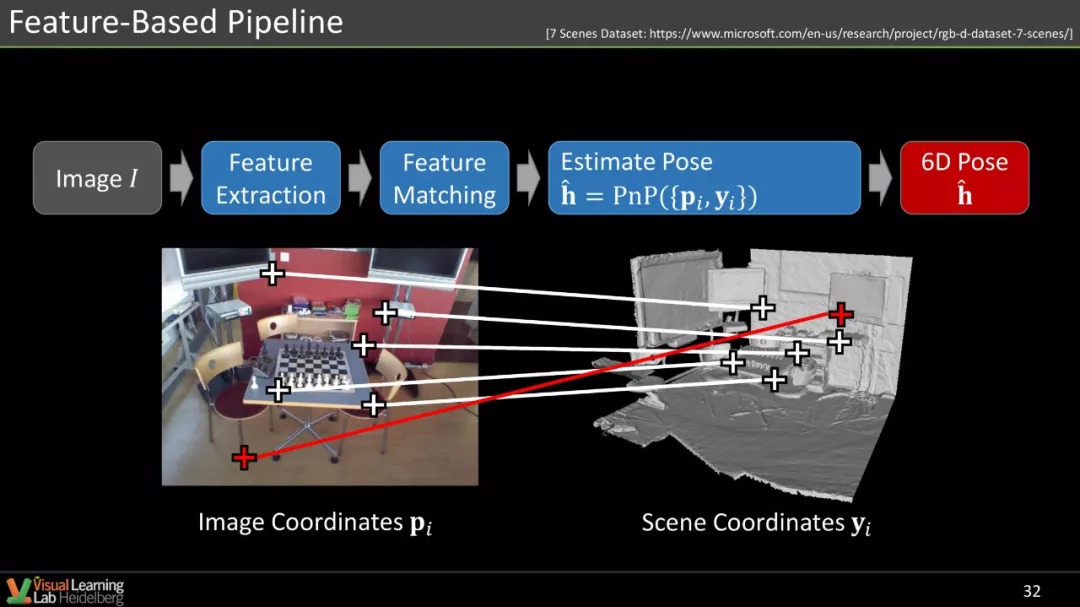
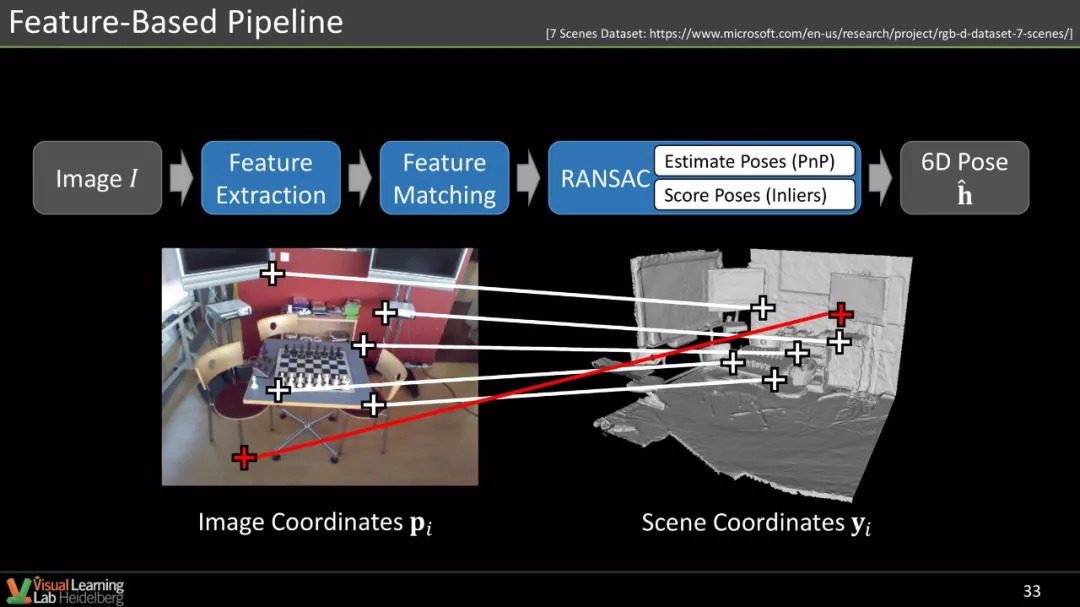
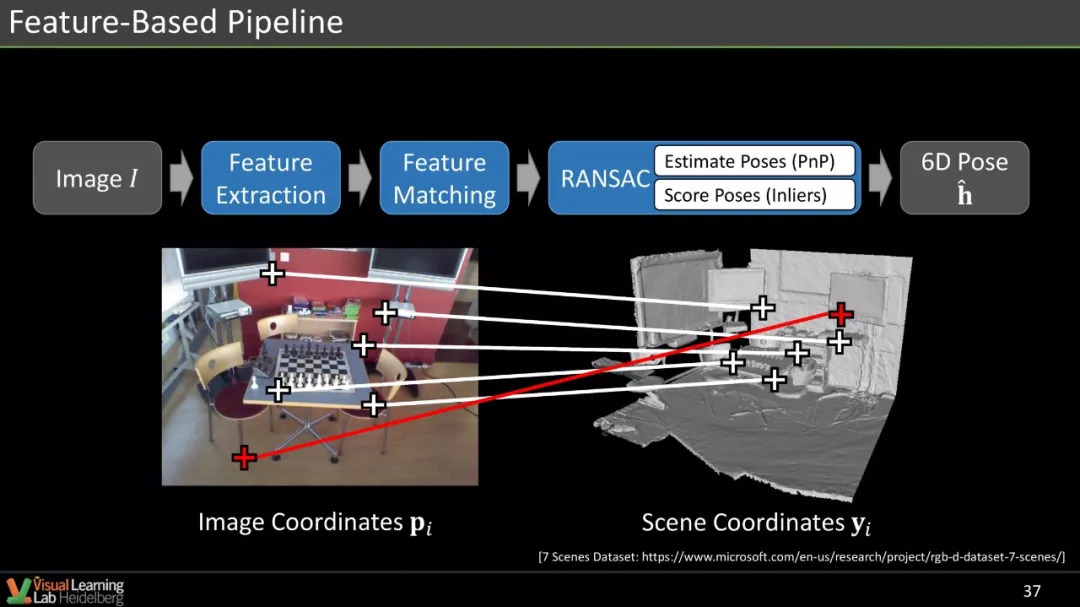
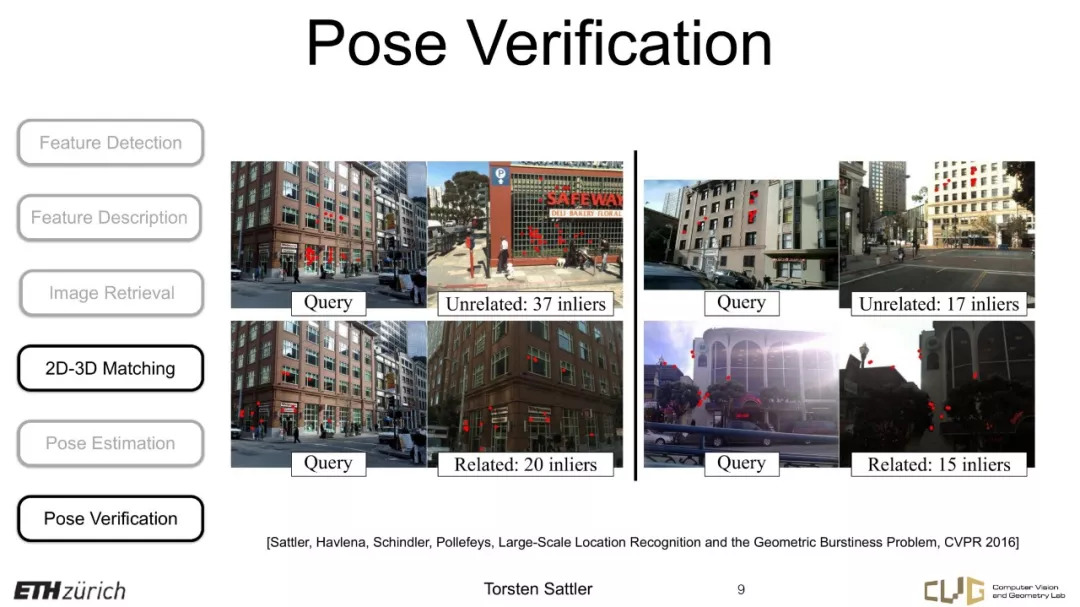
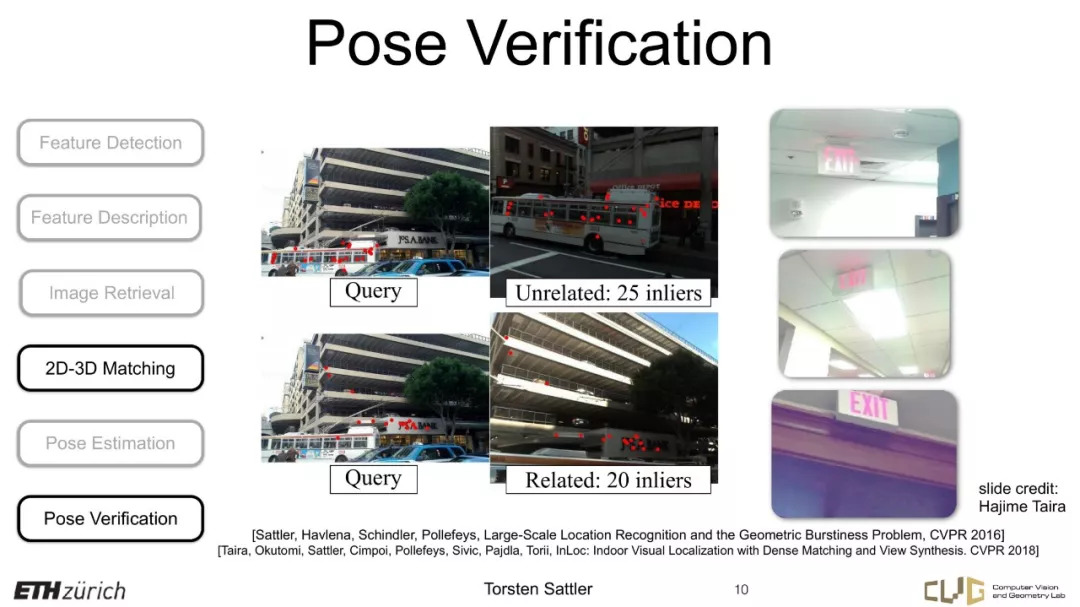
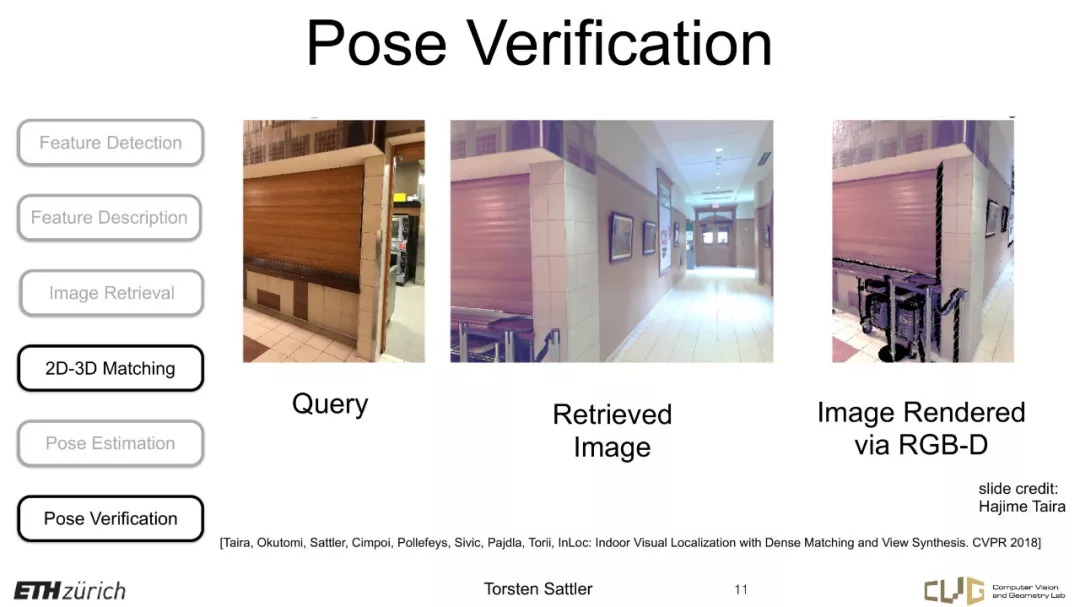
基于特征的定位方法
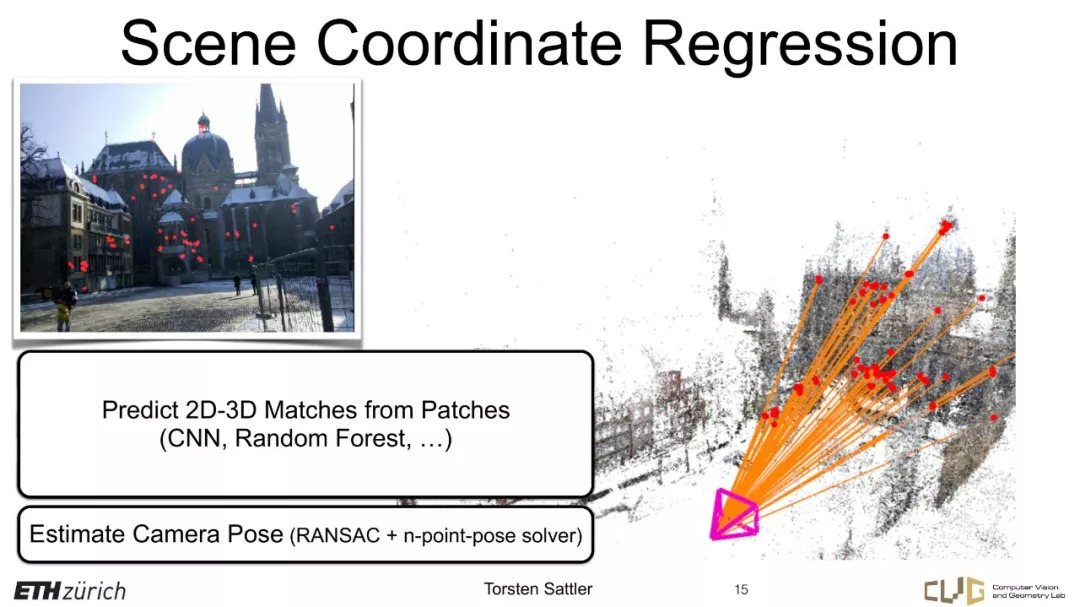
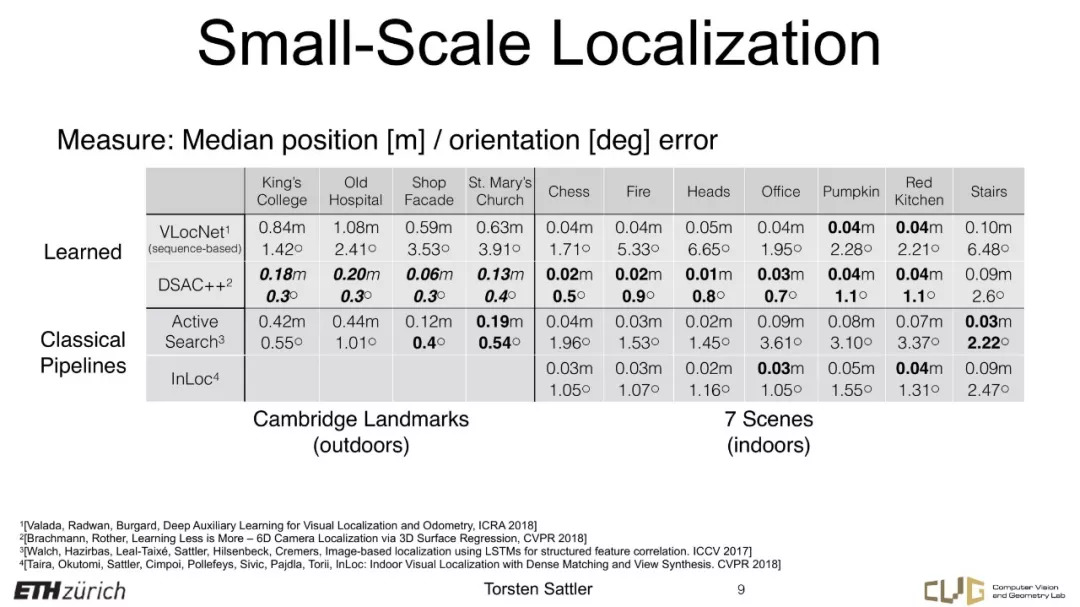
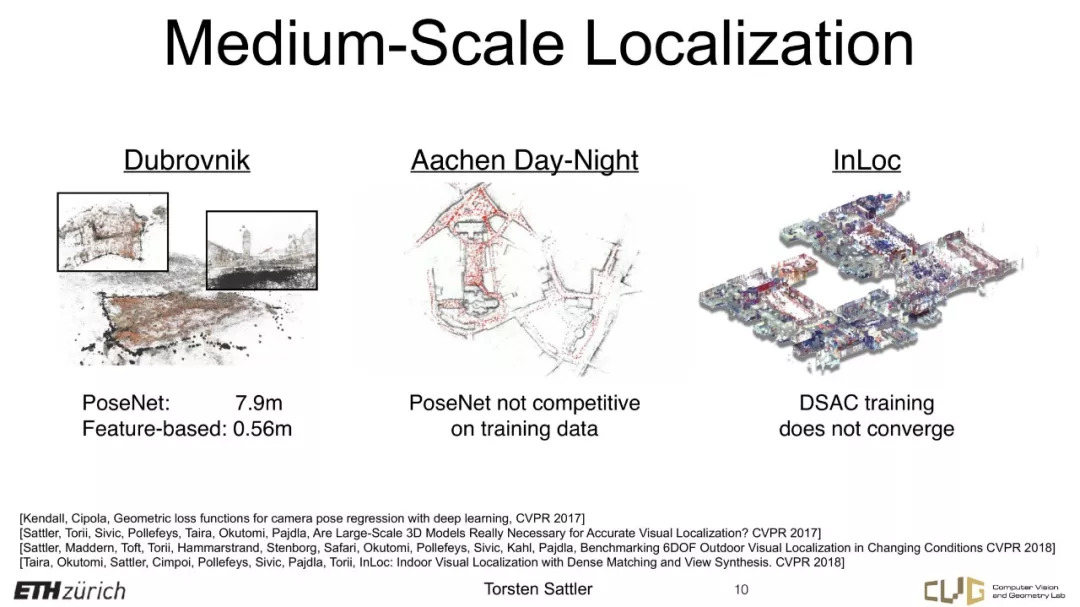
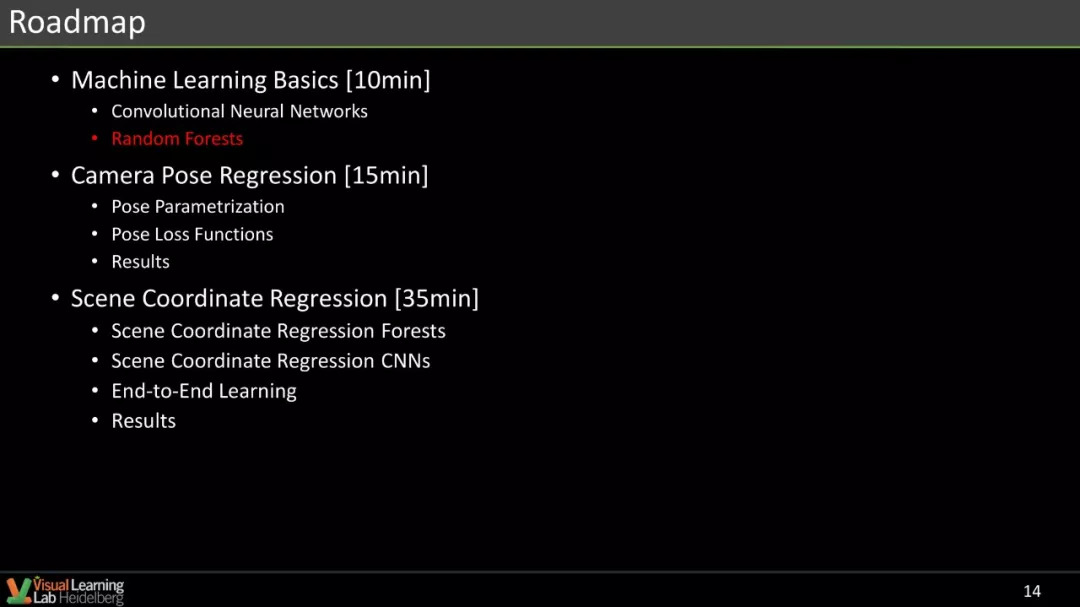
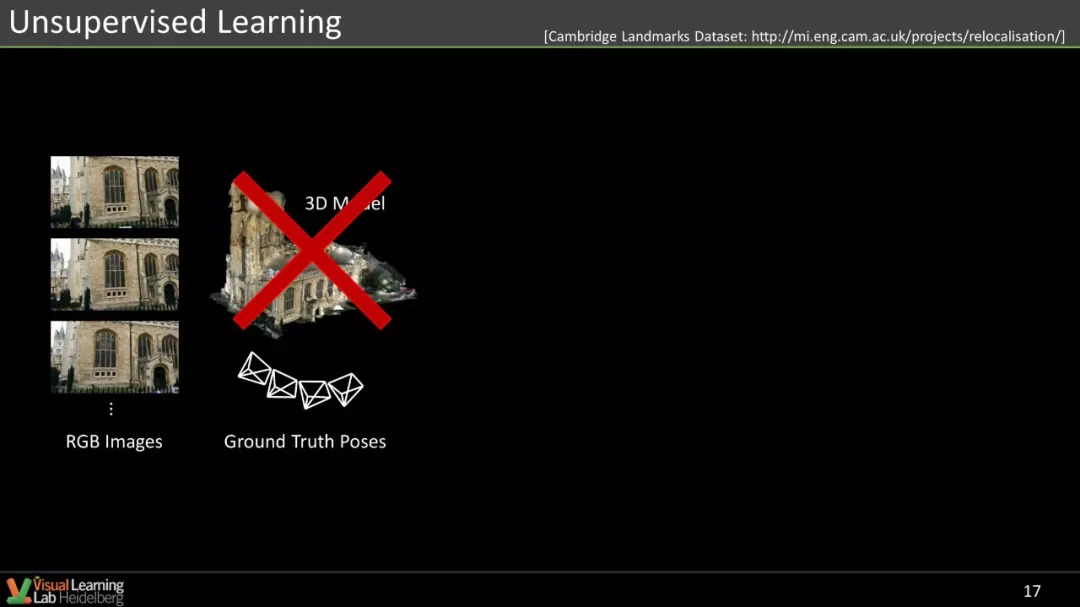
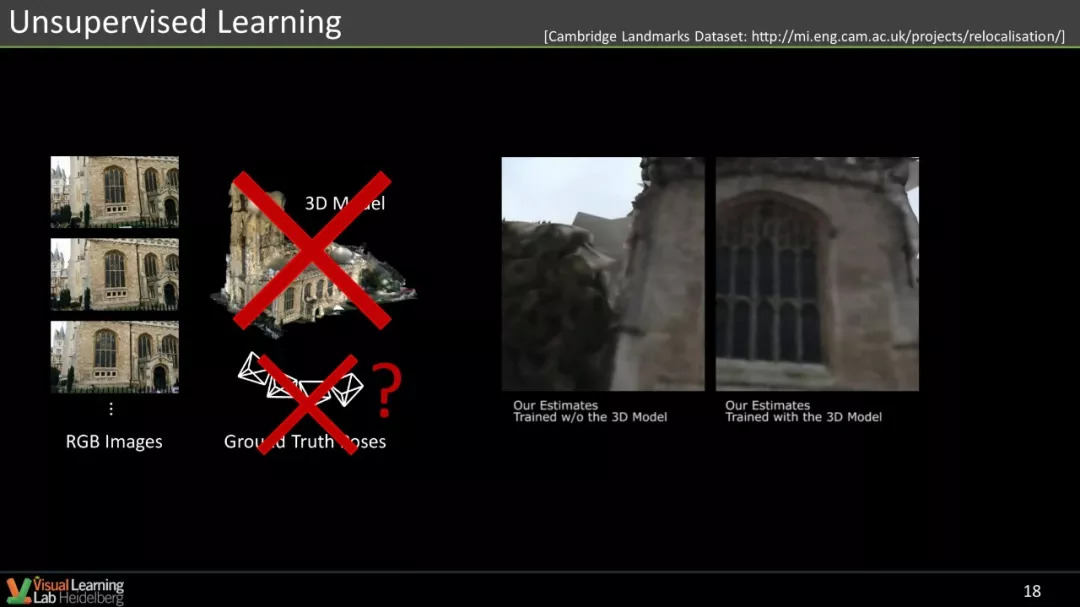
基于学习的定位方法研究现状
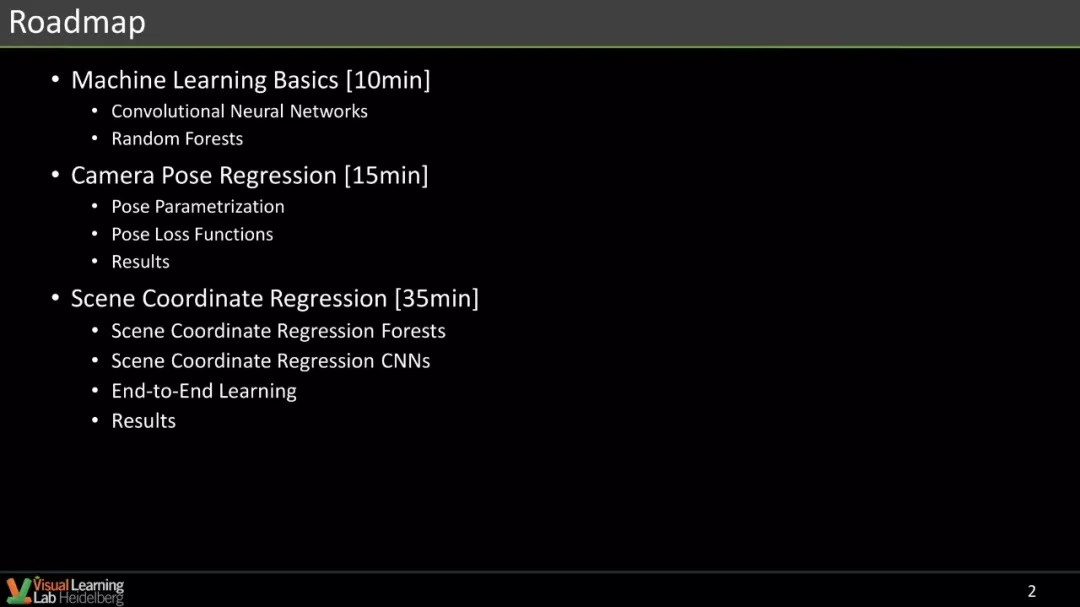
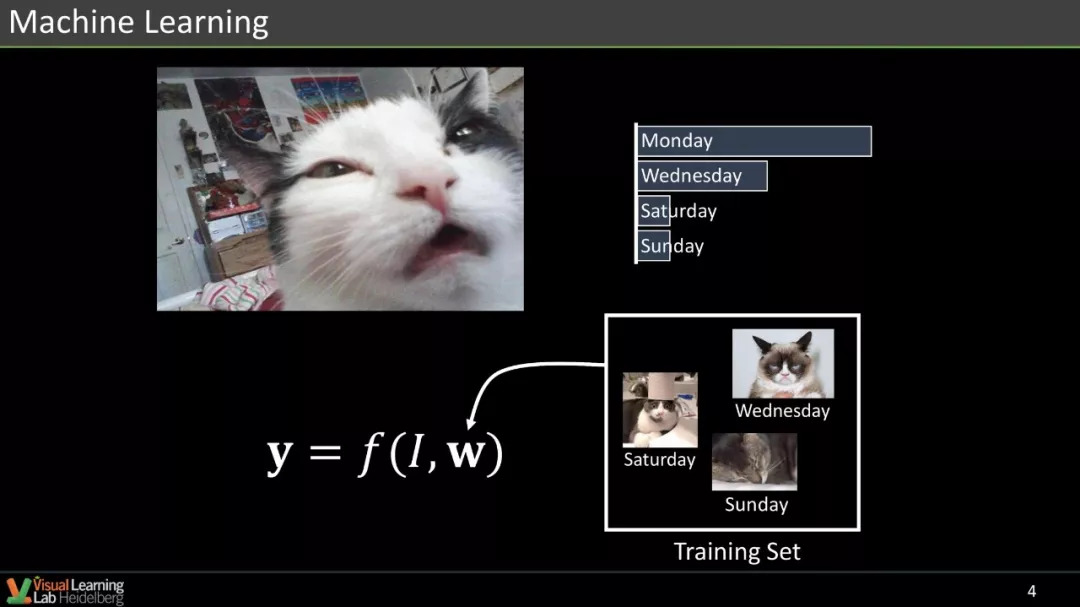
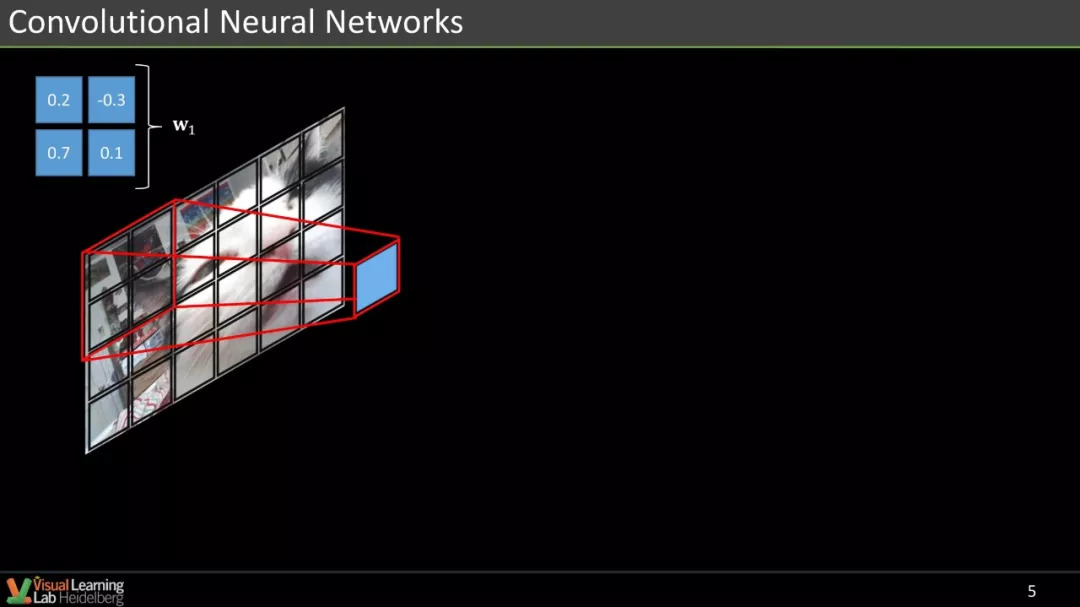
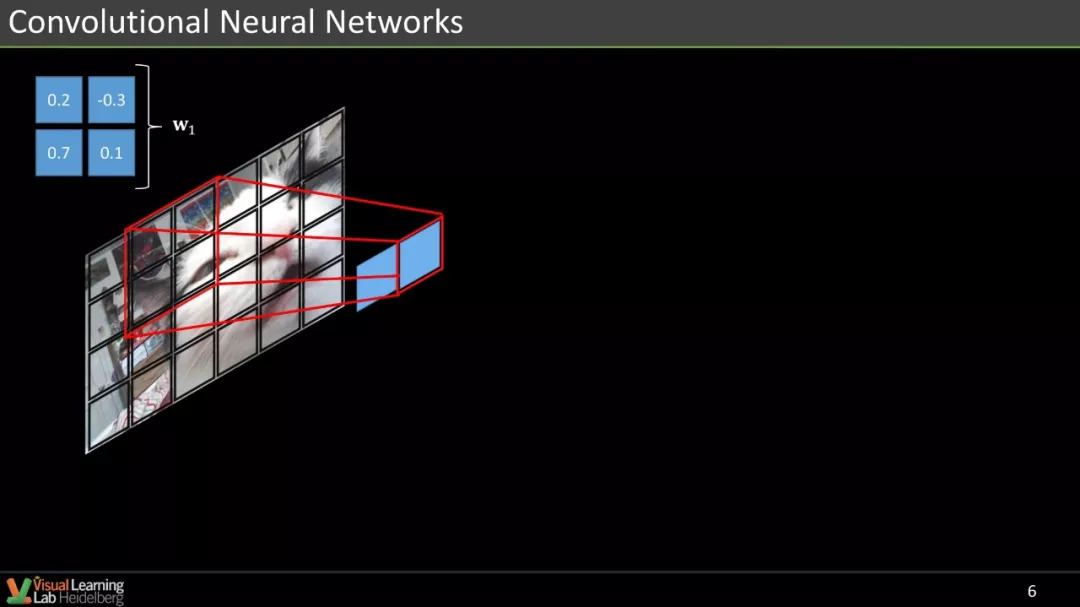
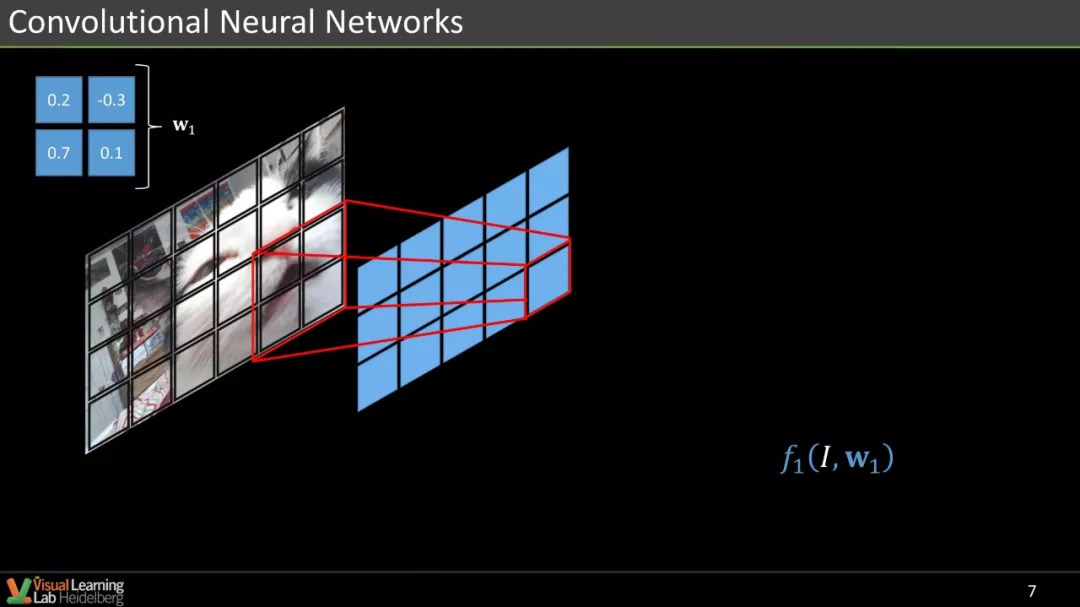
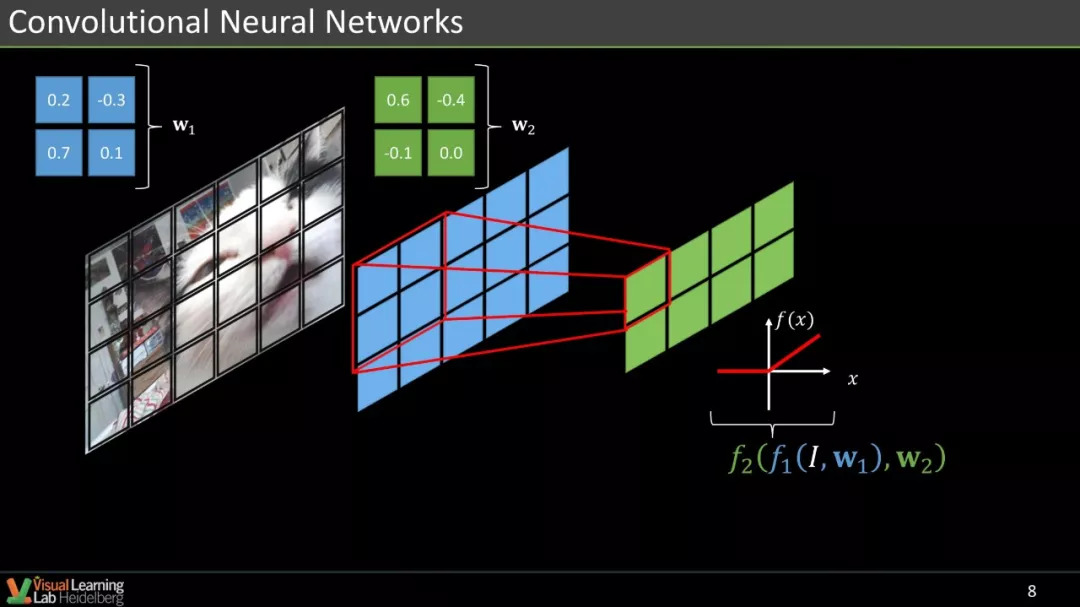
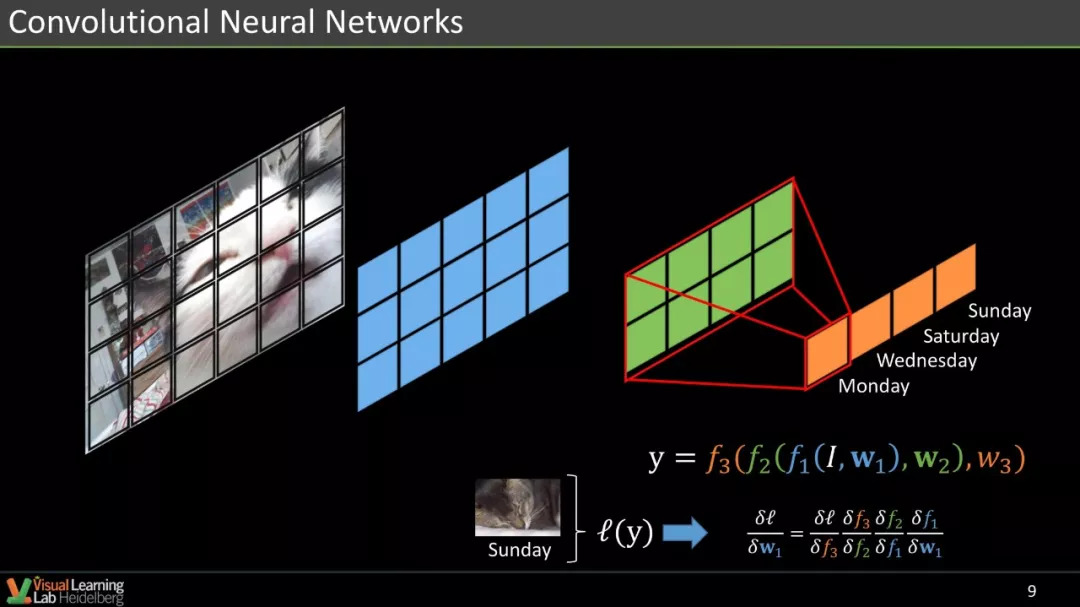
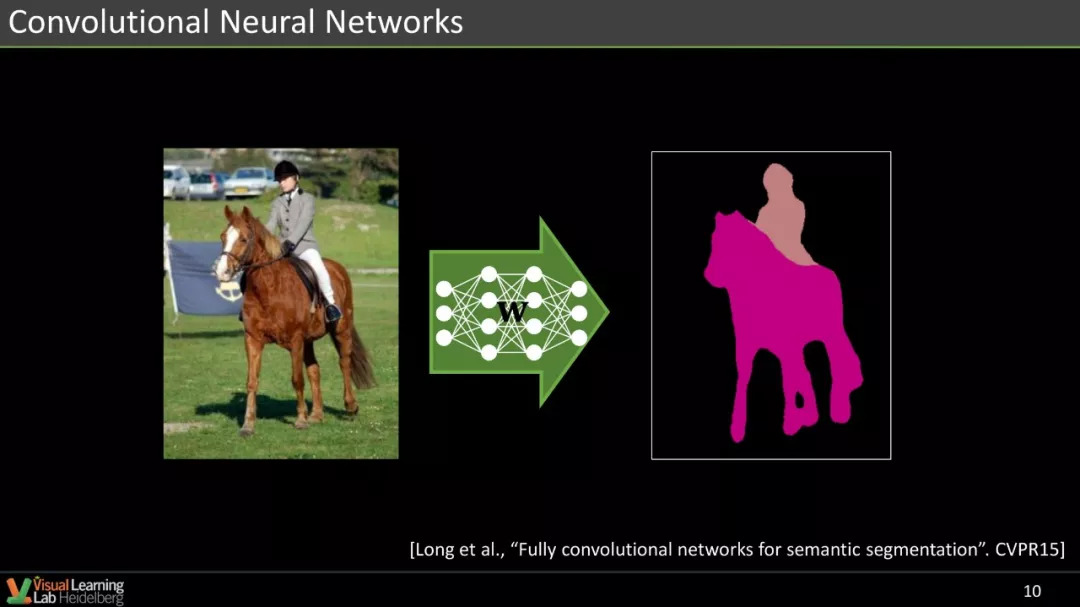
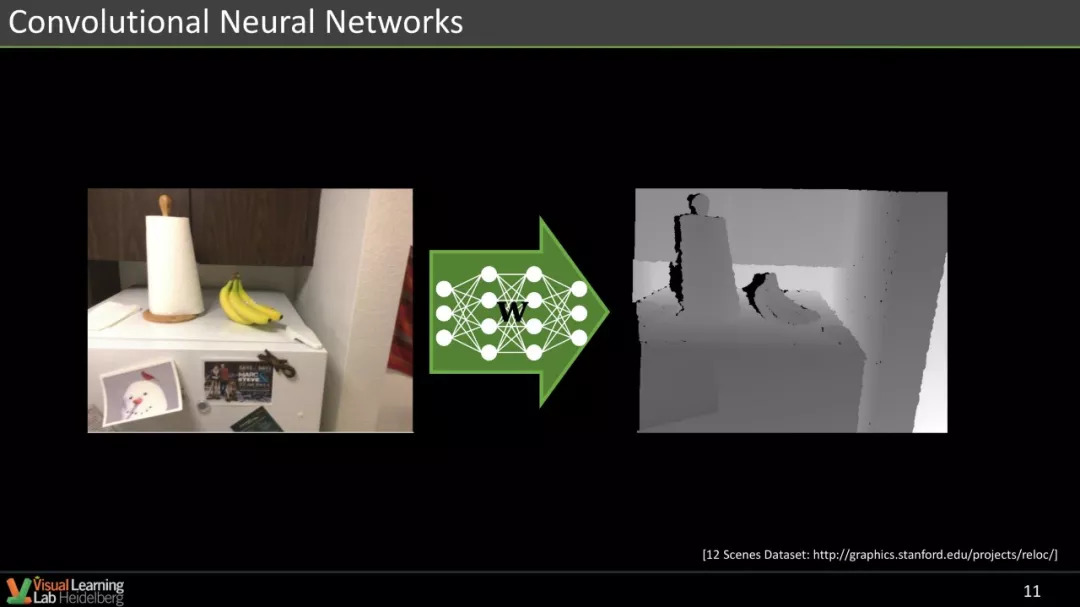
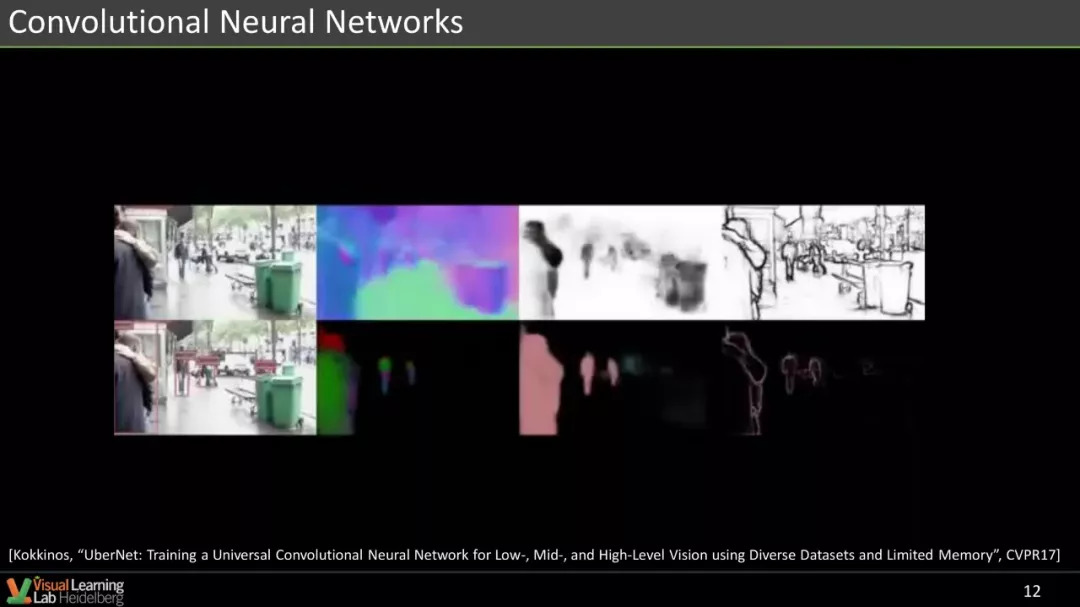
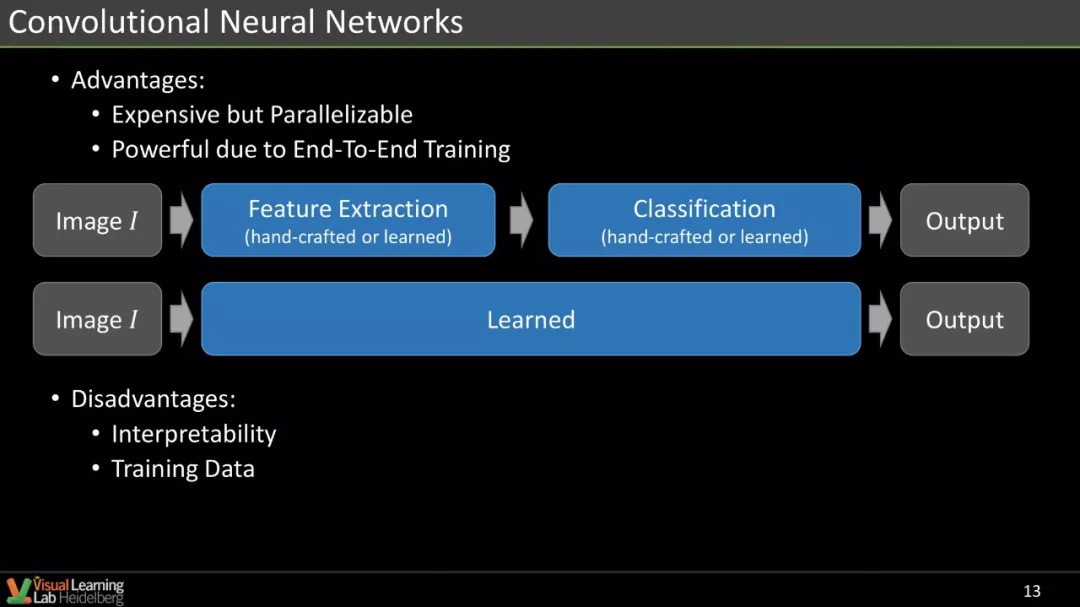
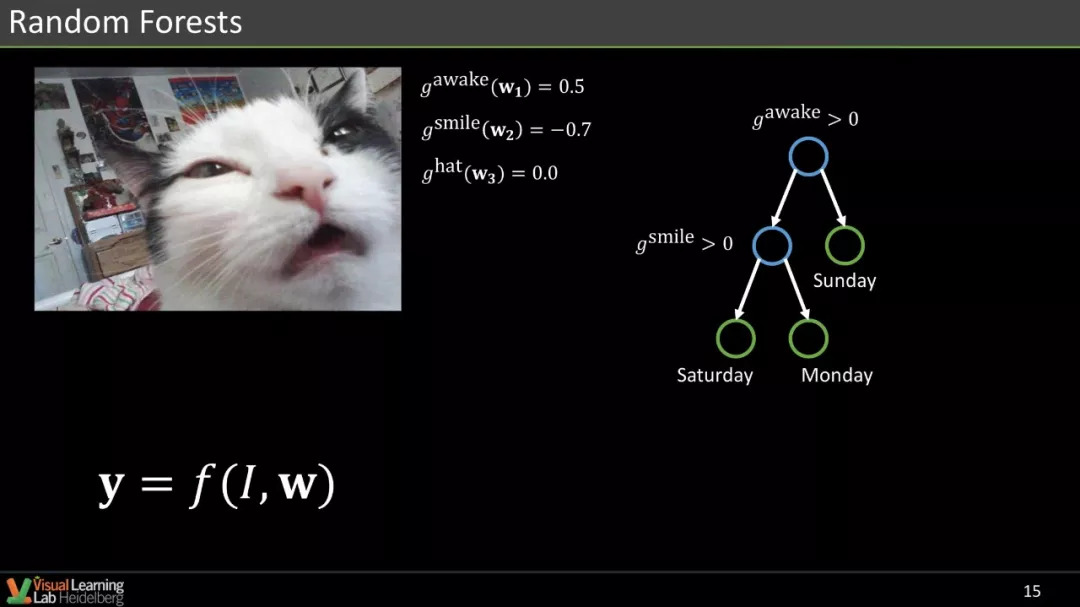
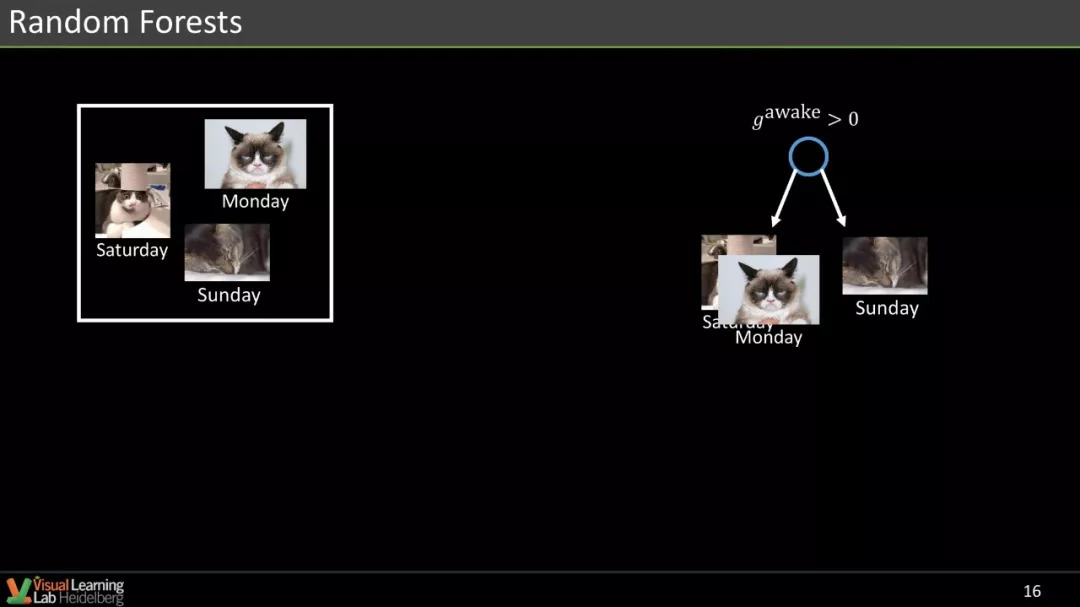
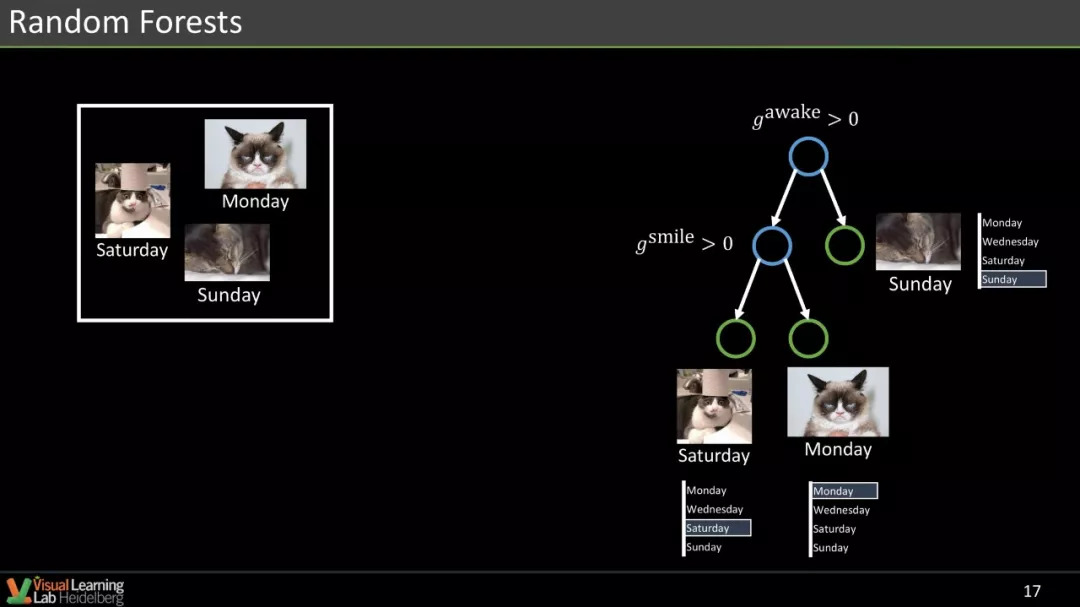
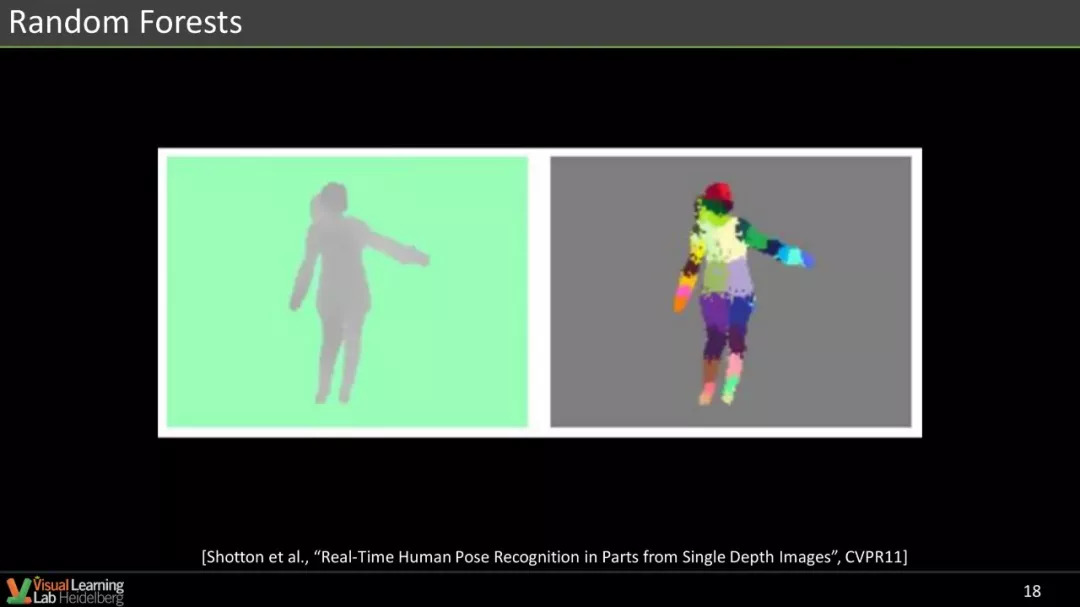
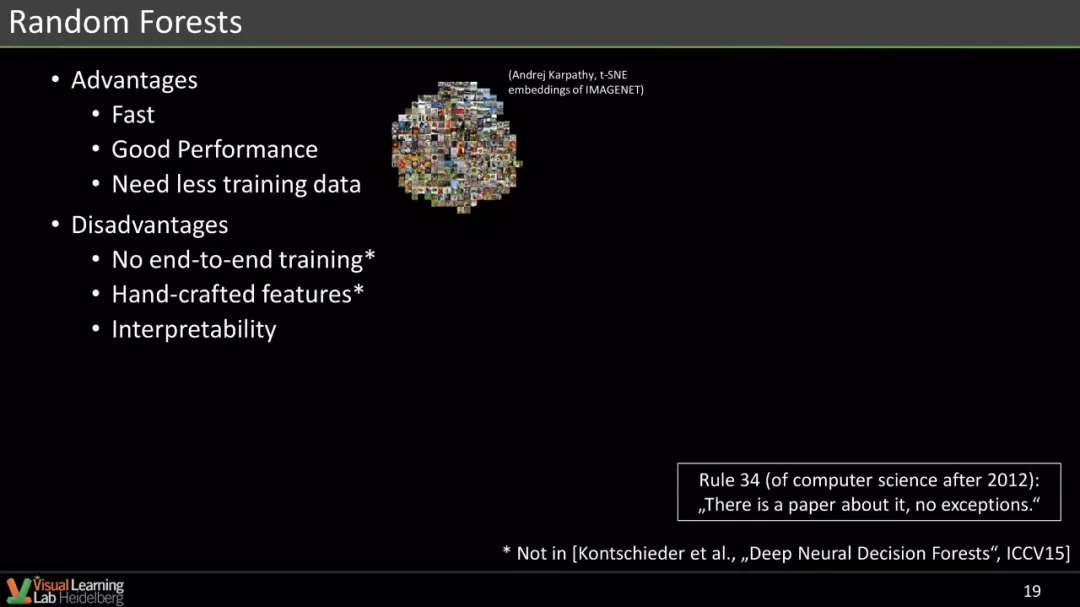
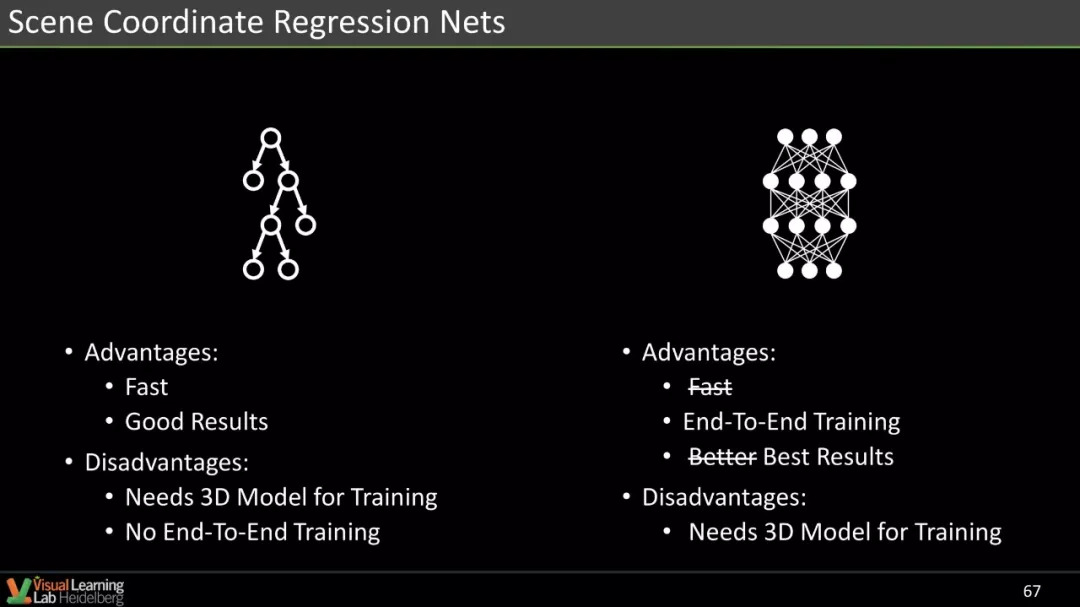
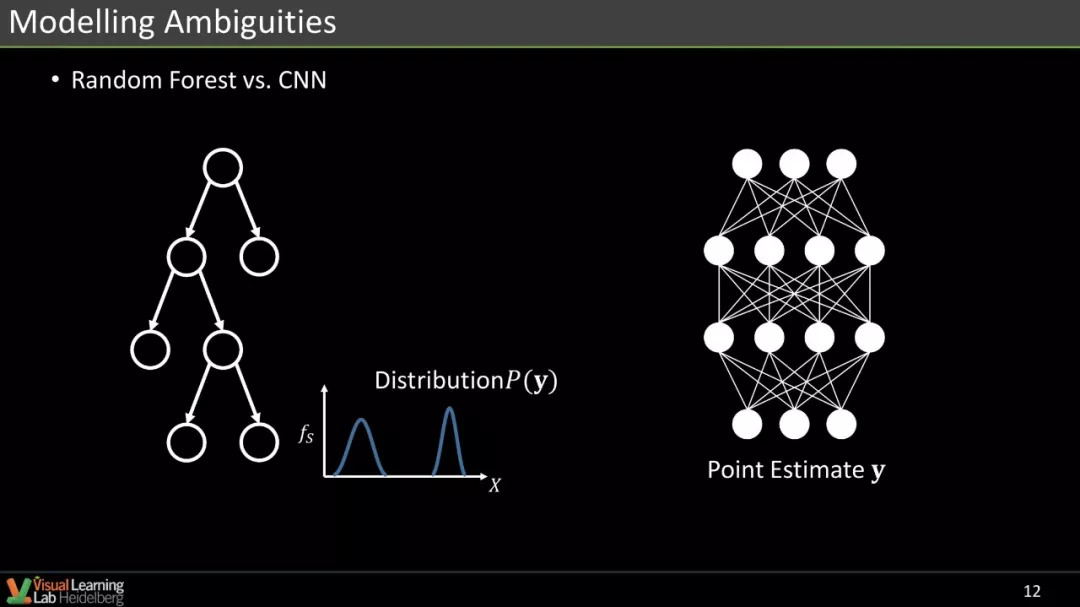
基础知识:随机森林、卷积神经网络
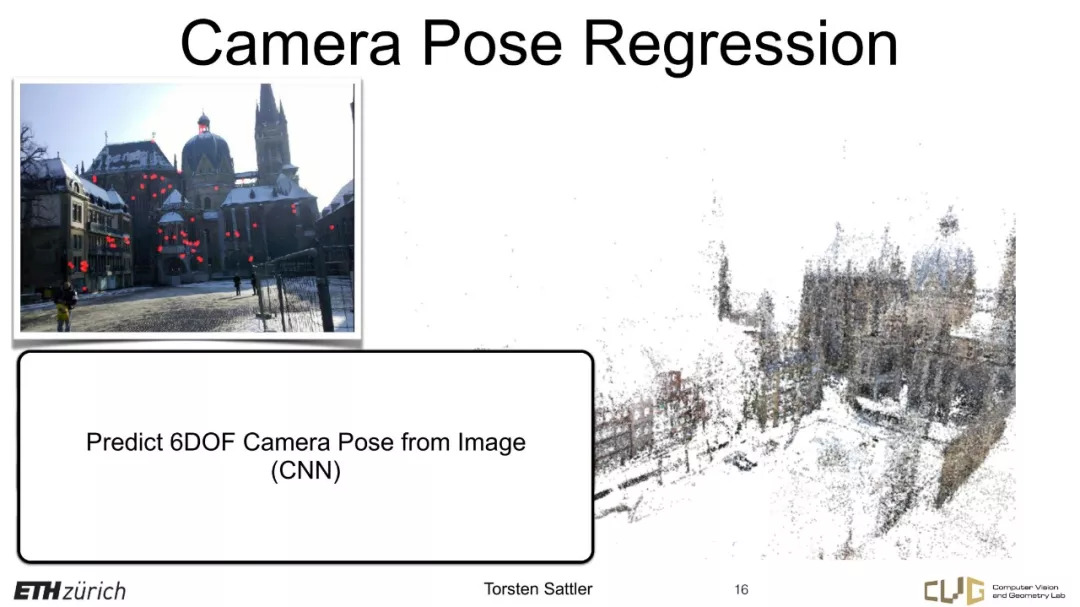
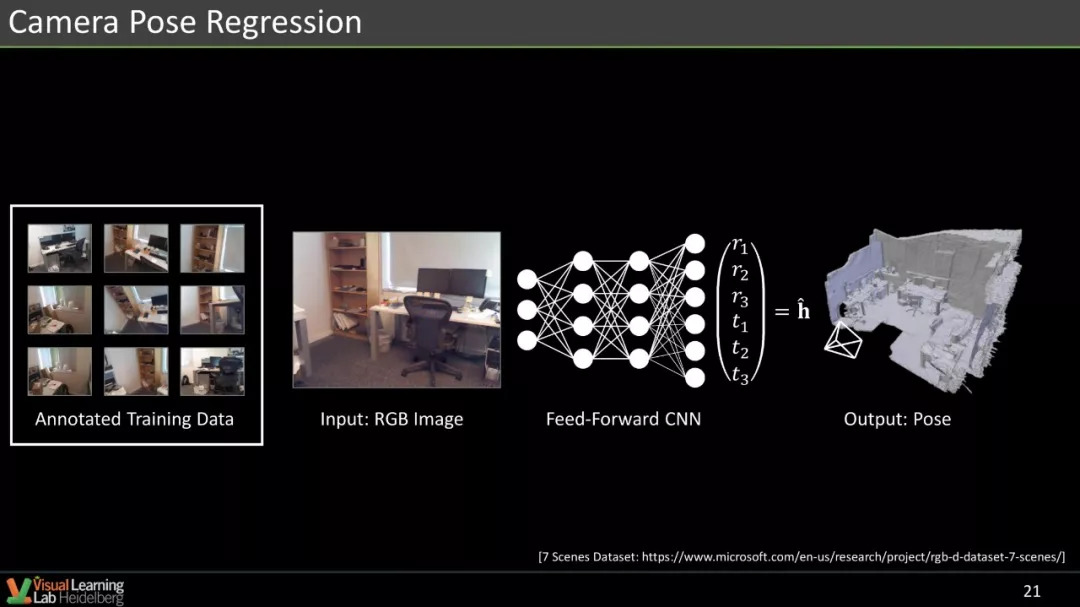
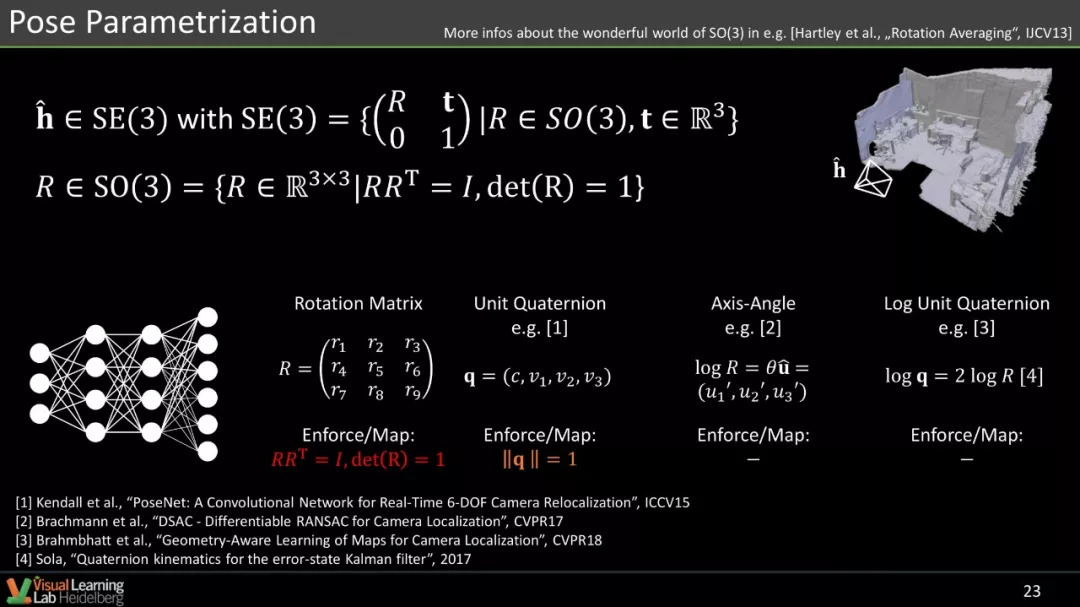
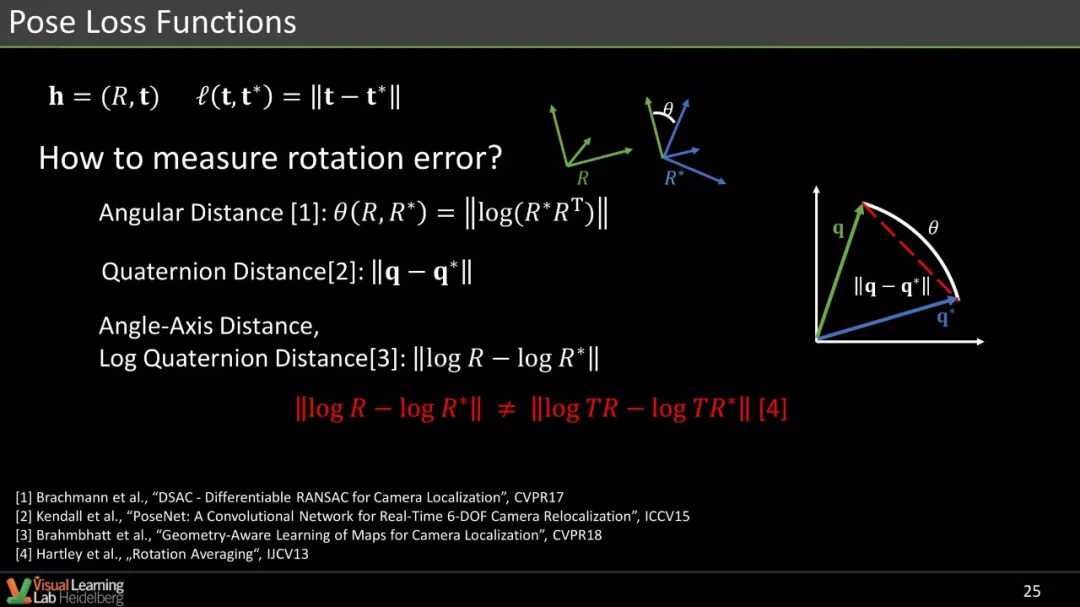
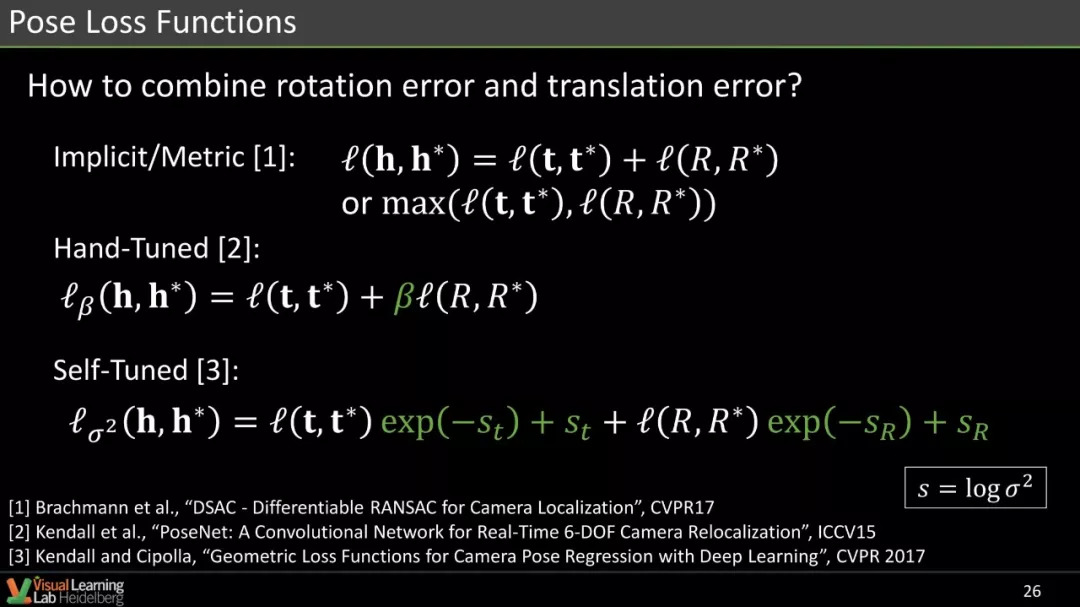
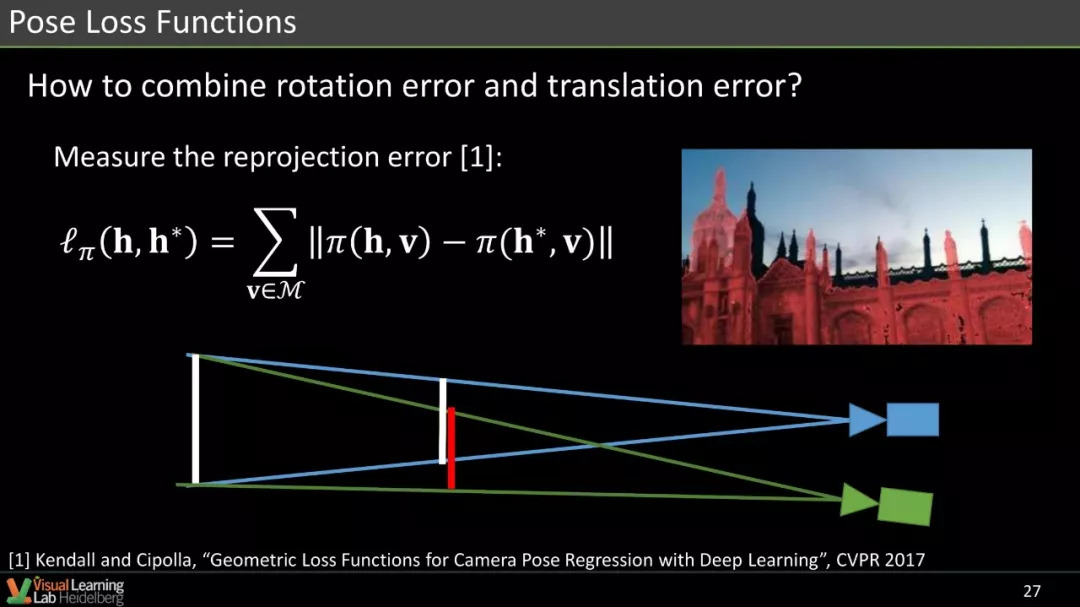
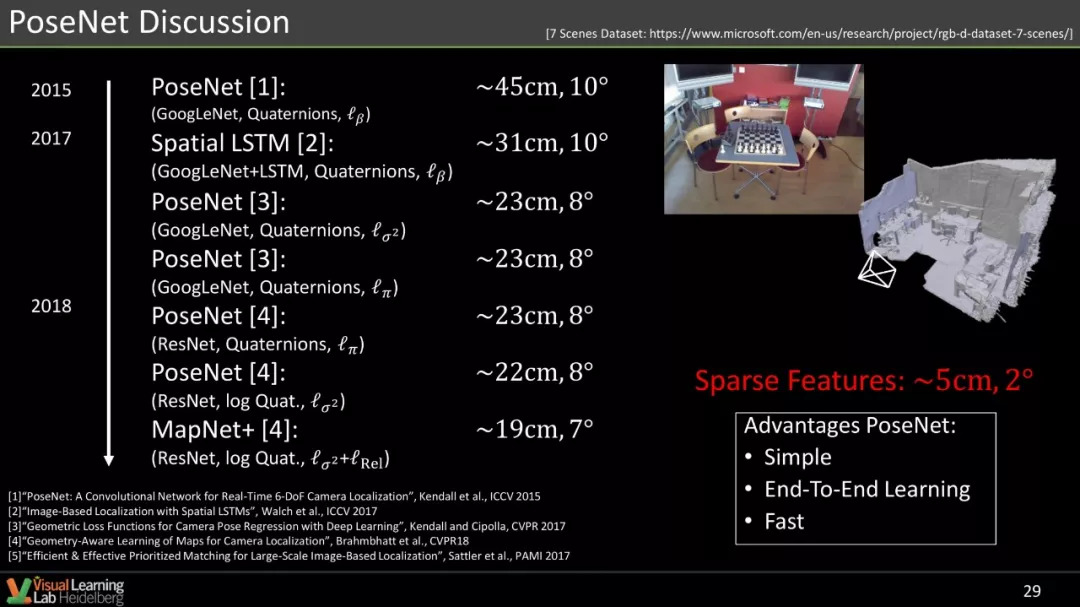
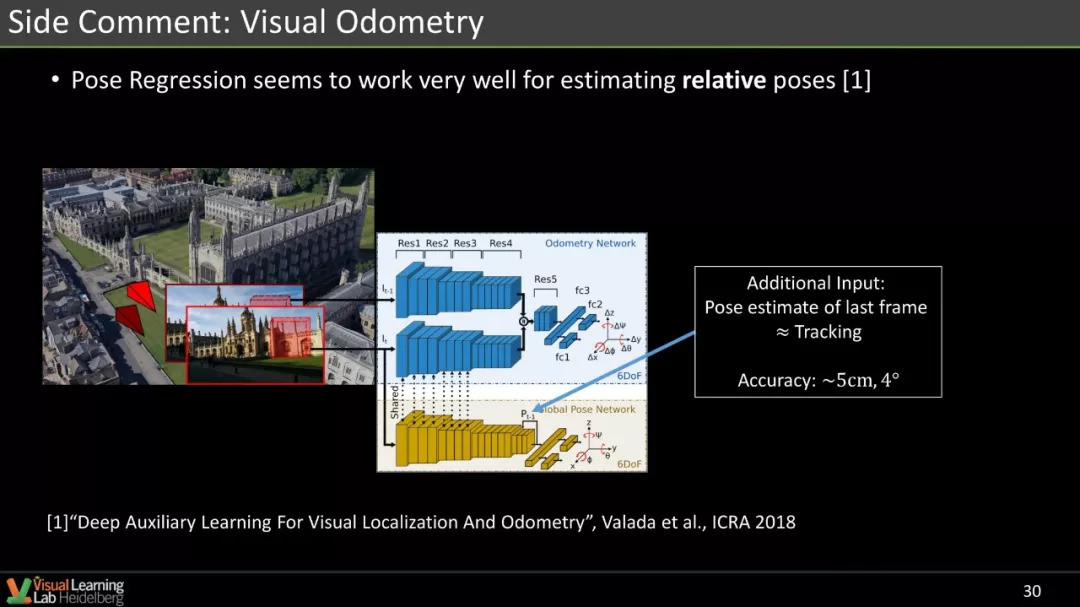
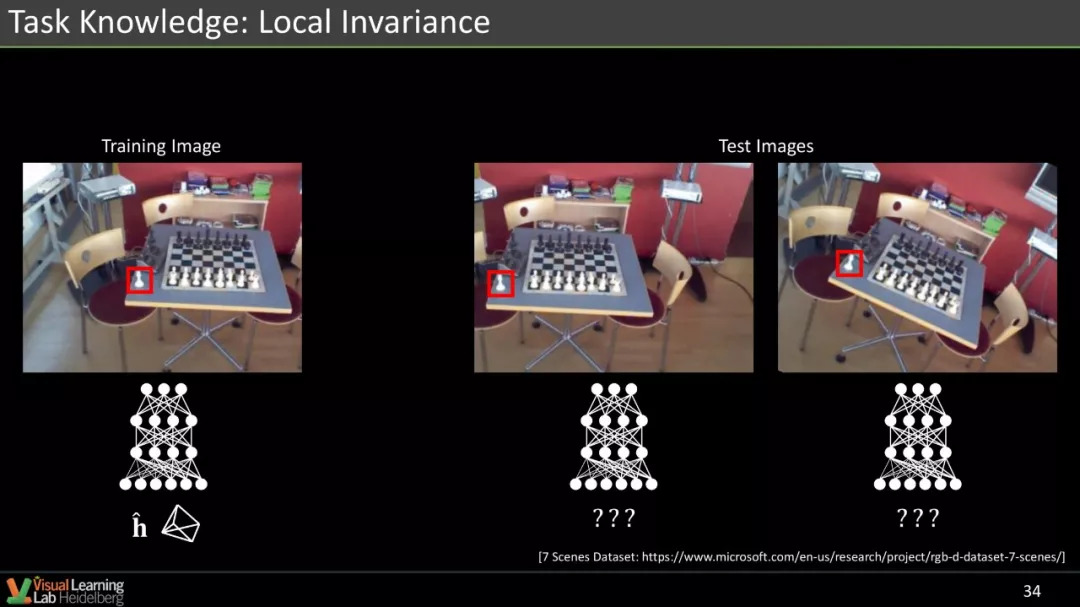
相机姿态表示学习
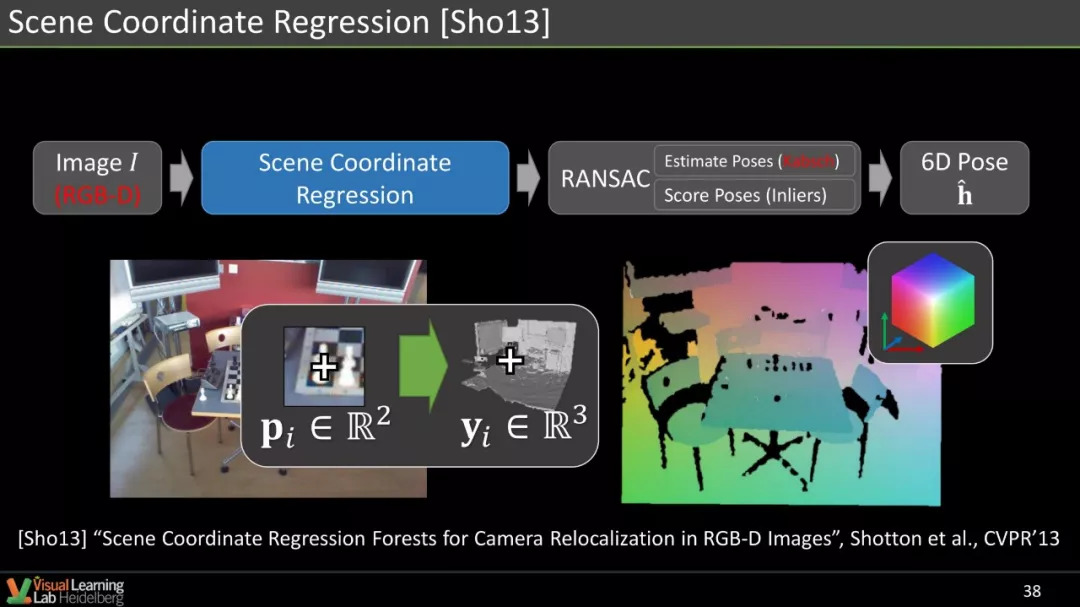
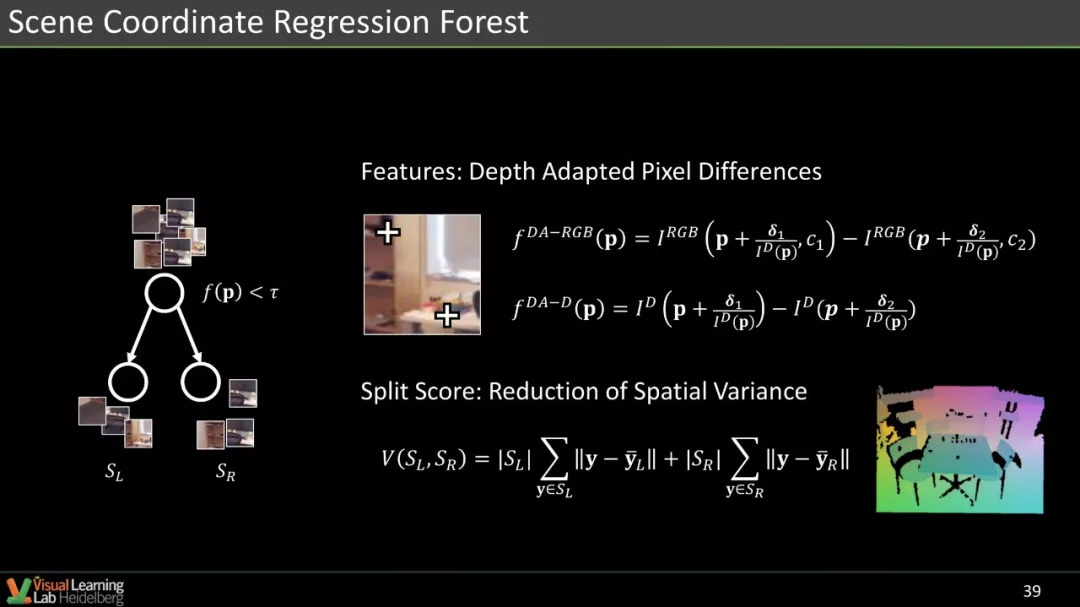
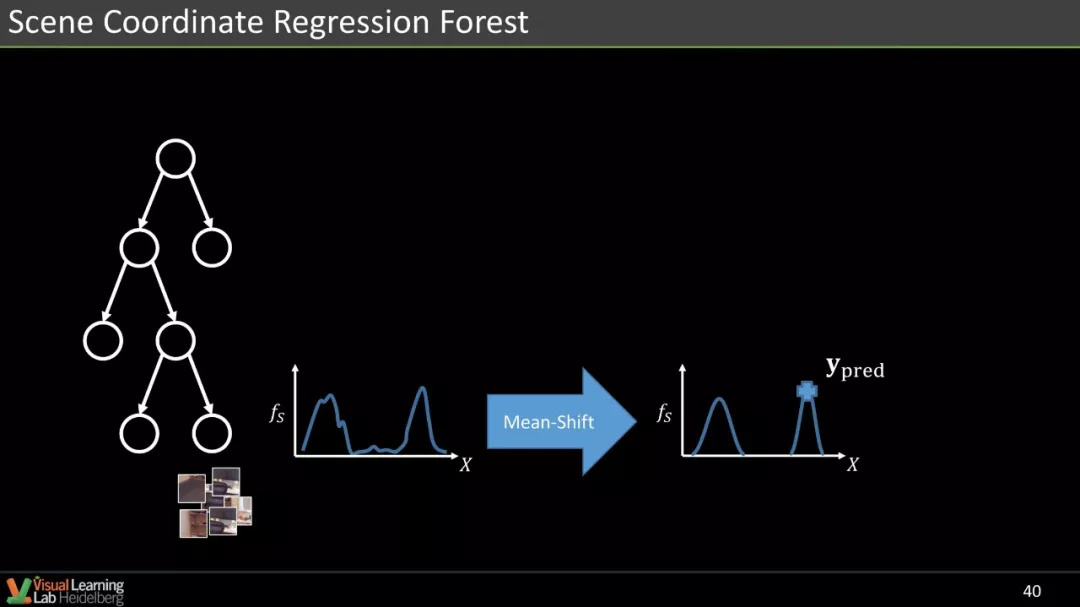
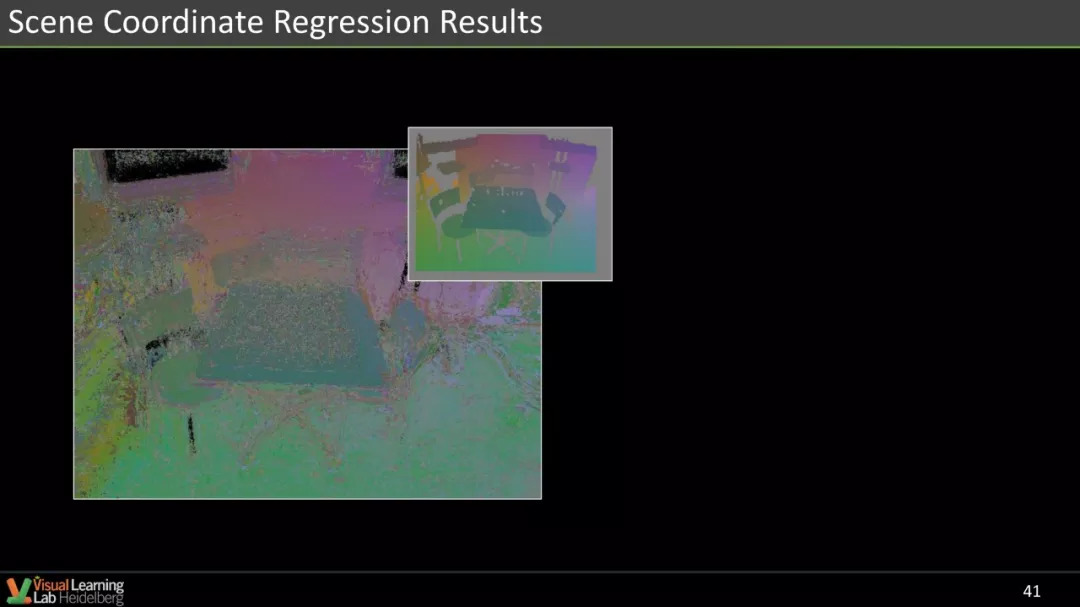
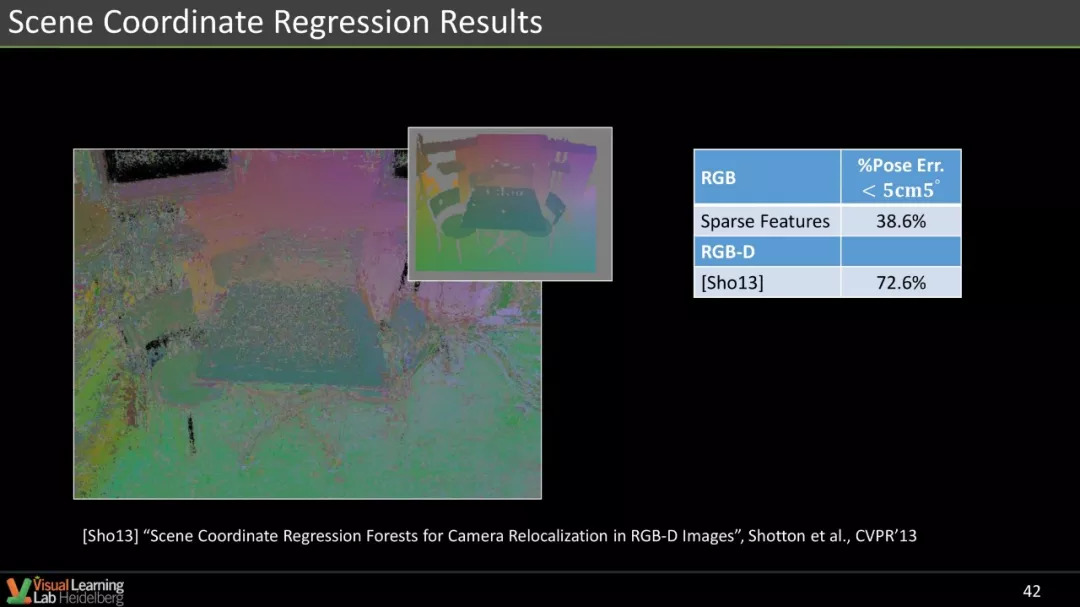
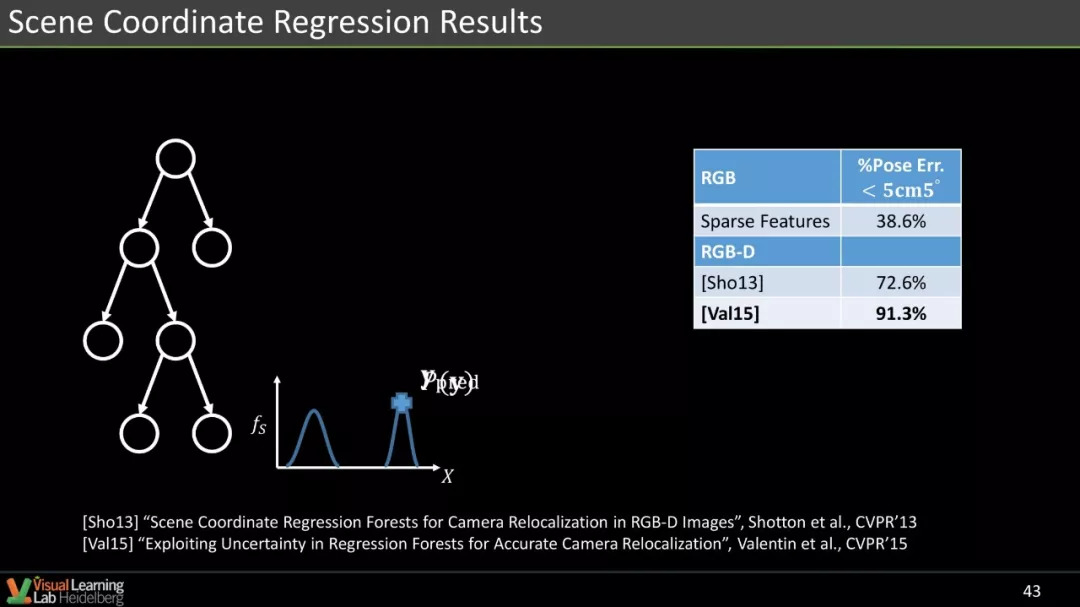
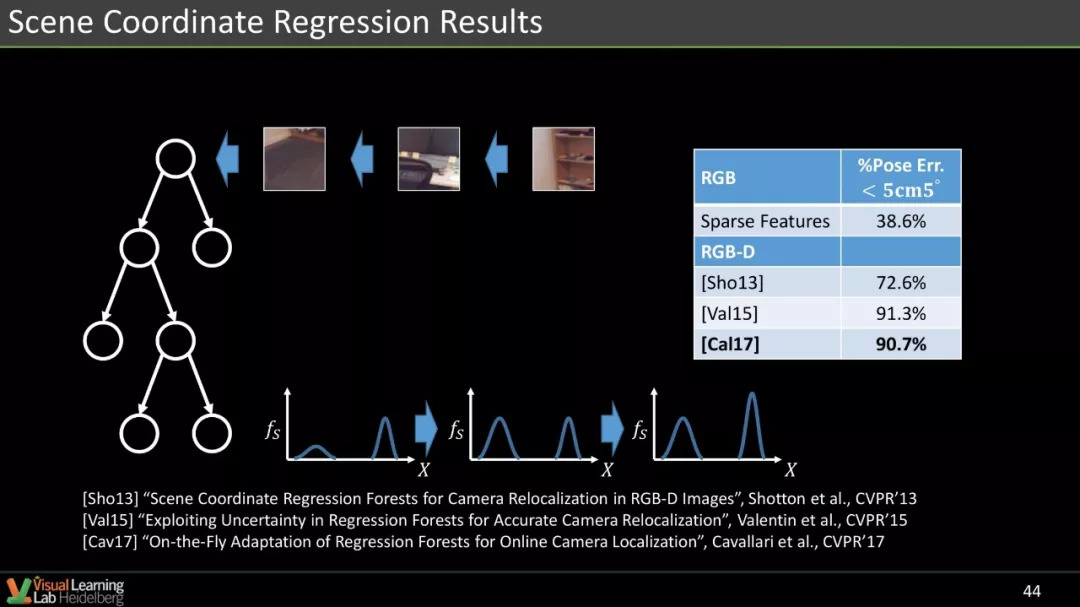
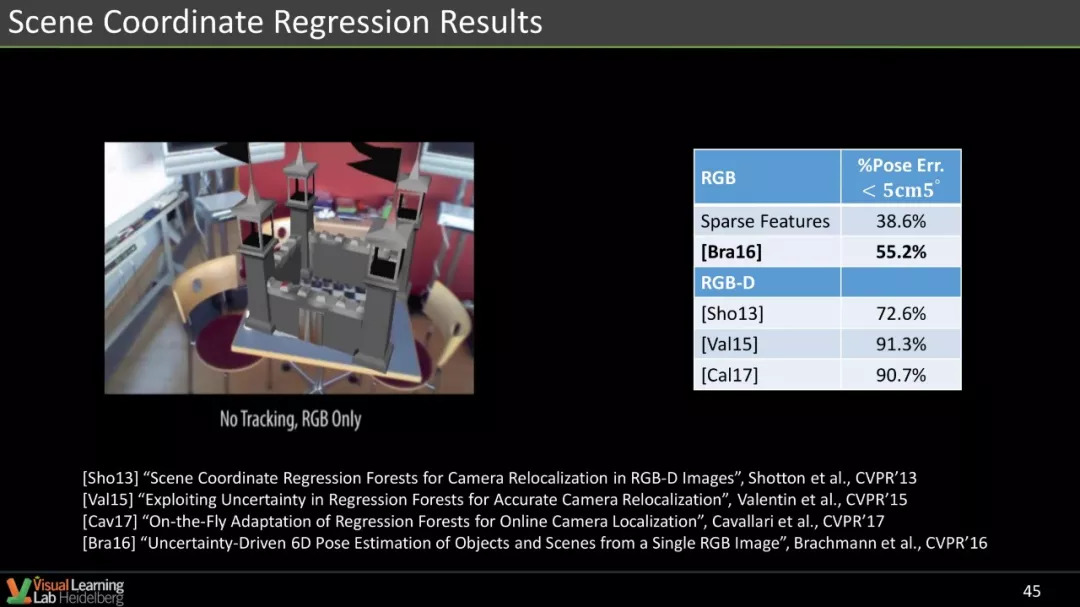
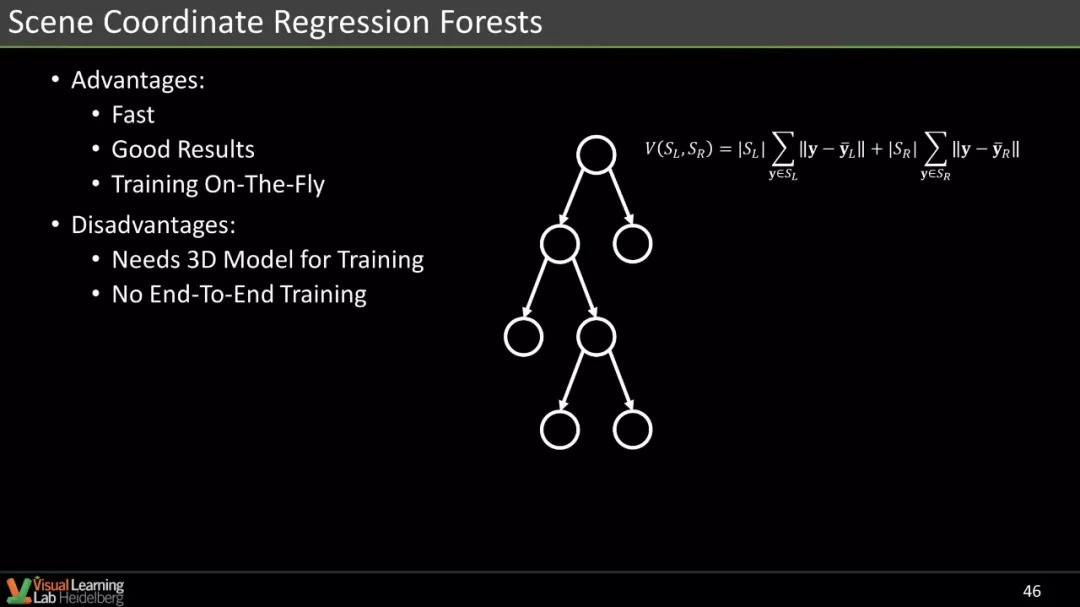
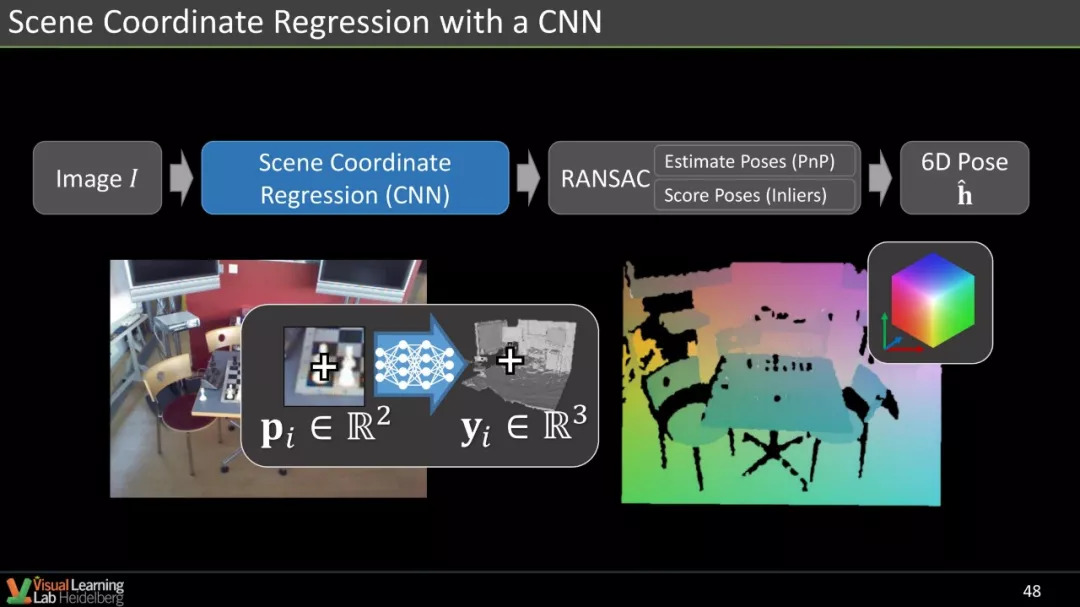
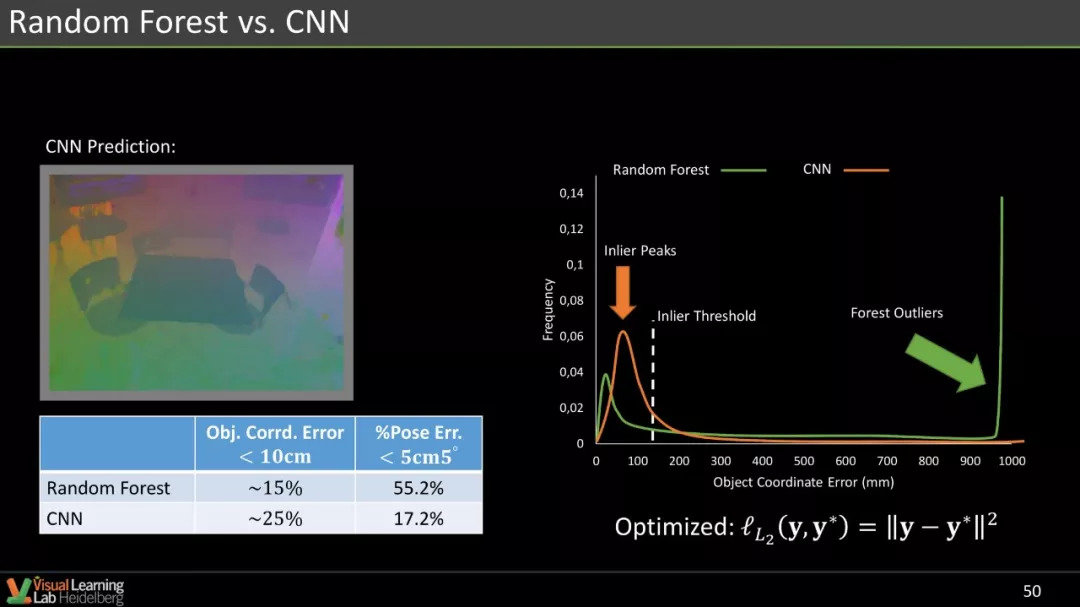
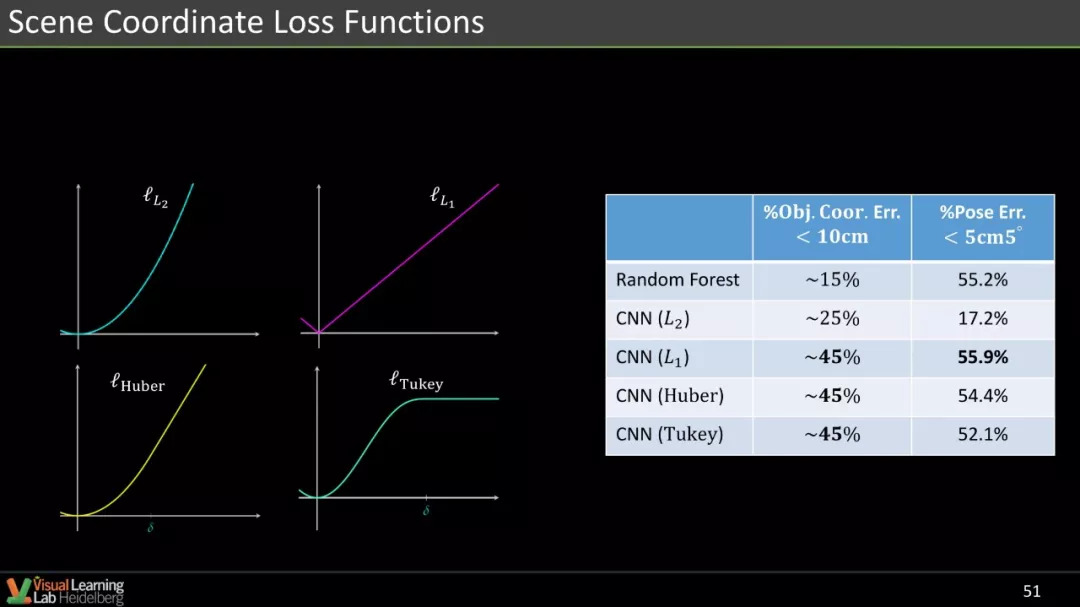
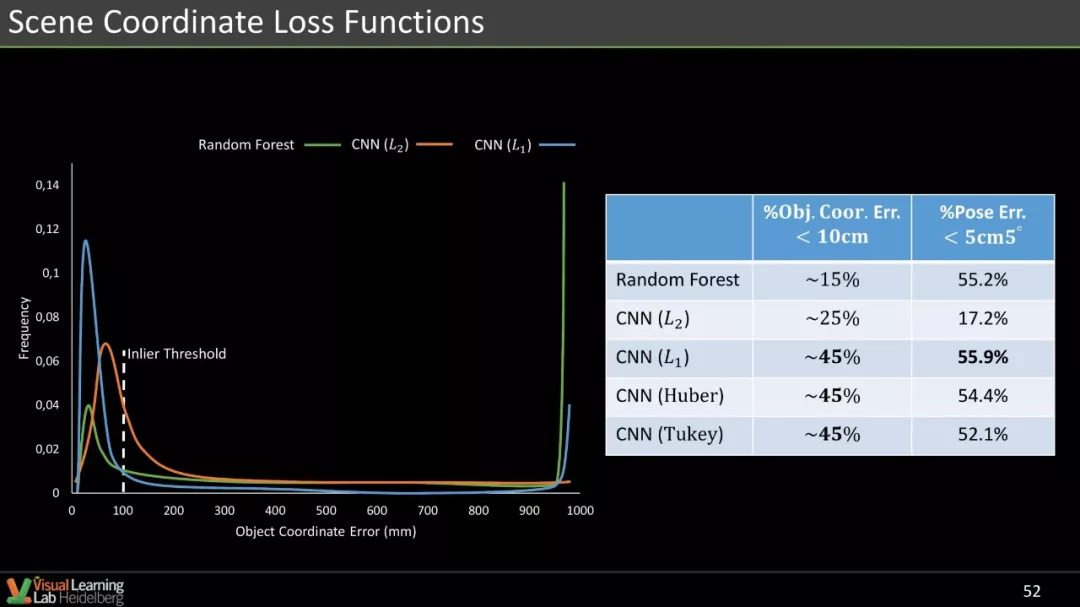
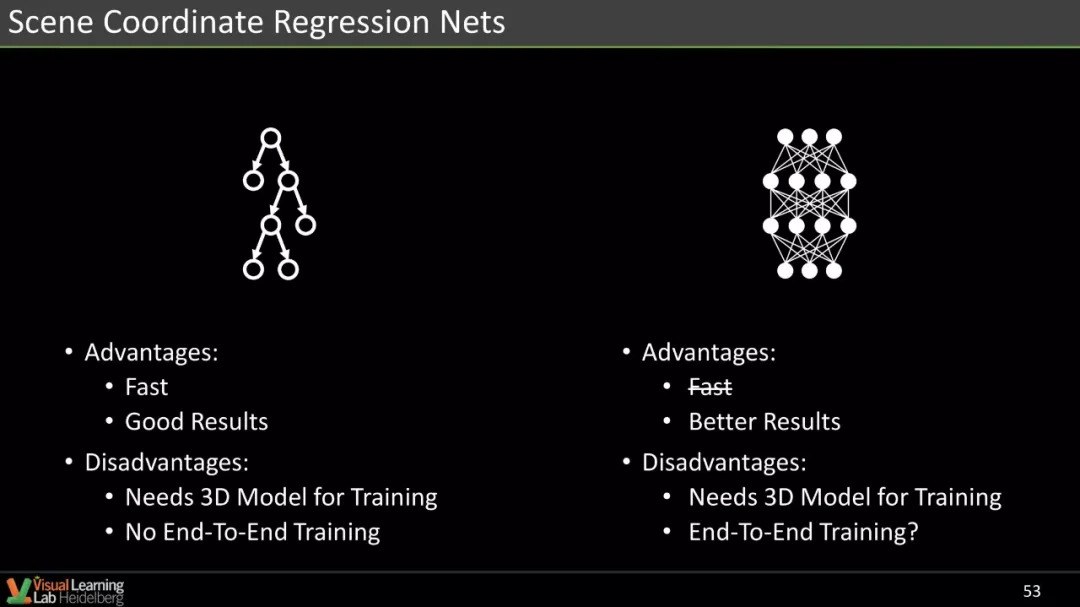
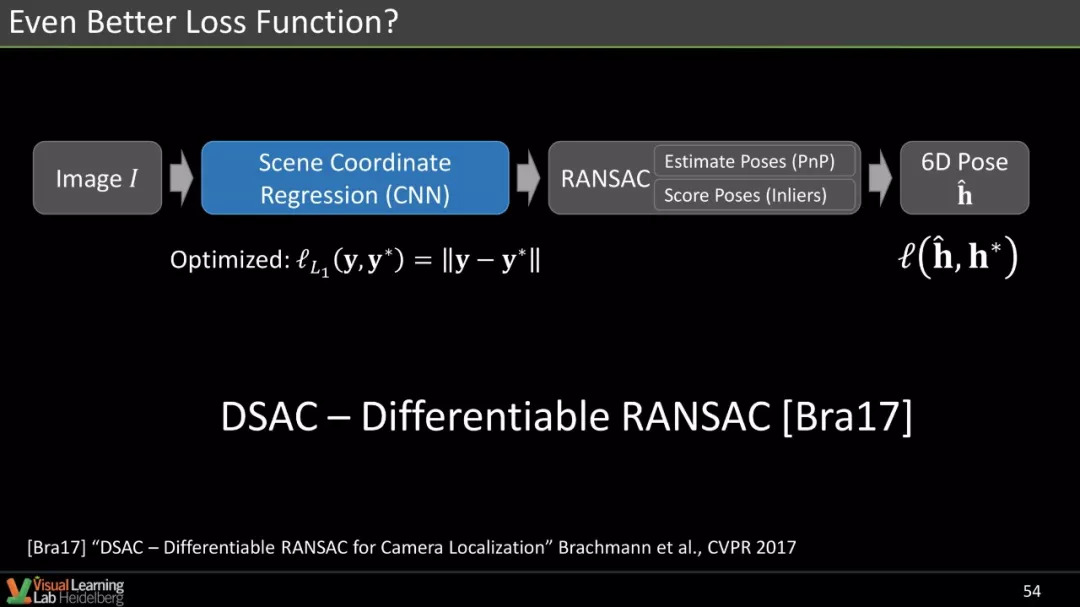
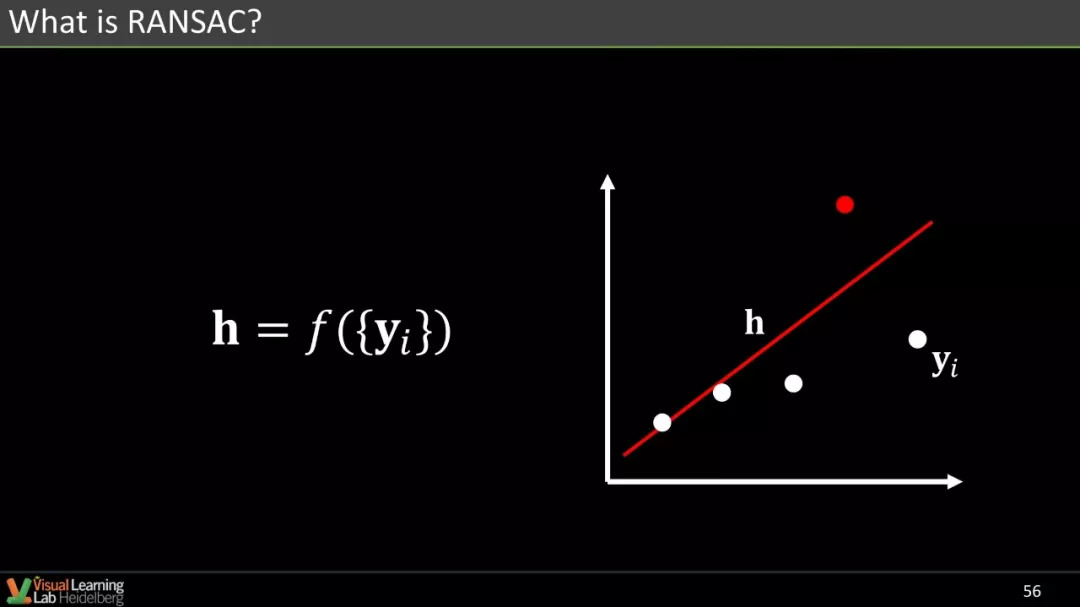
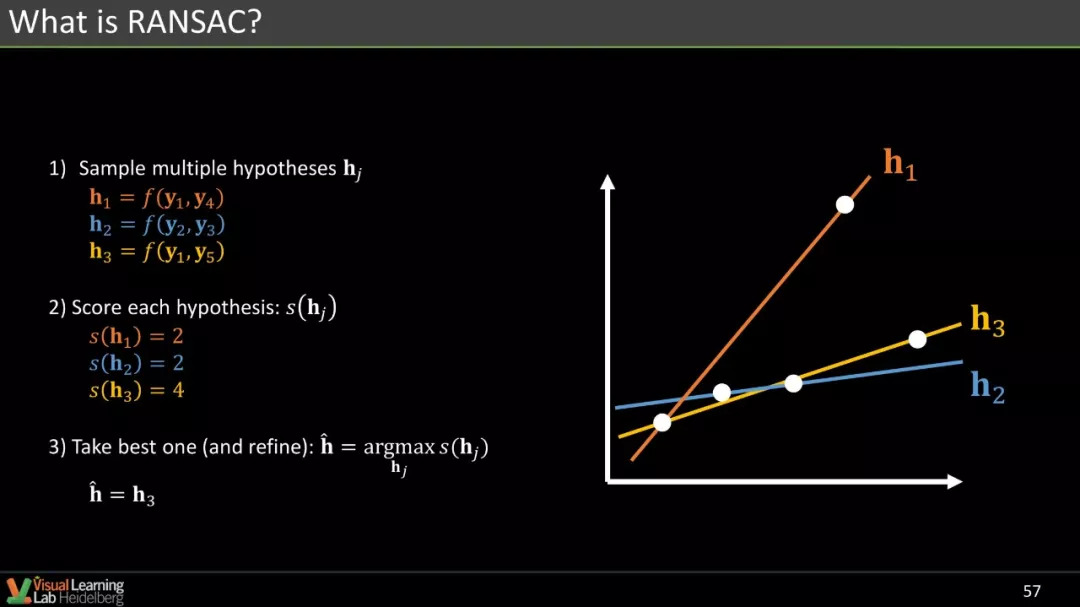
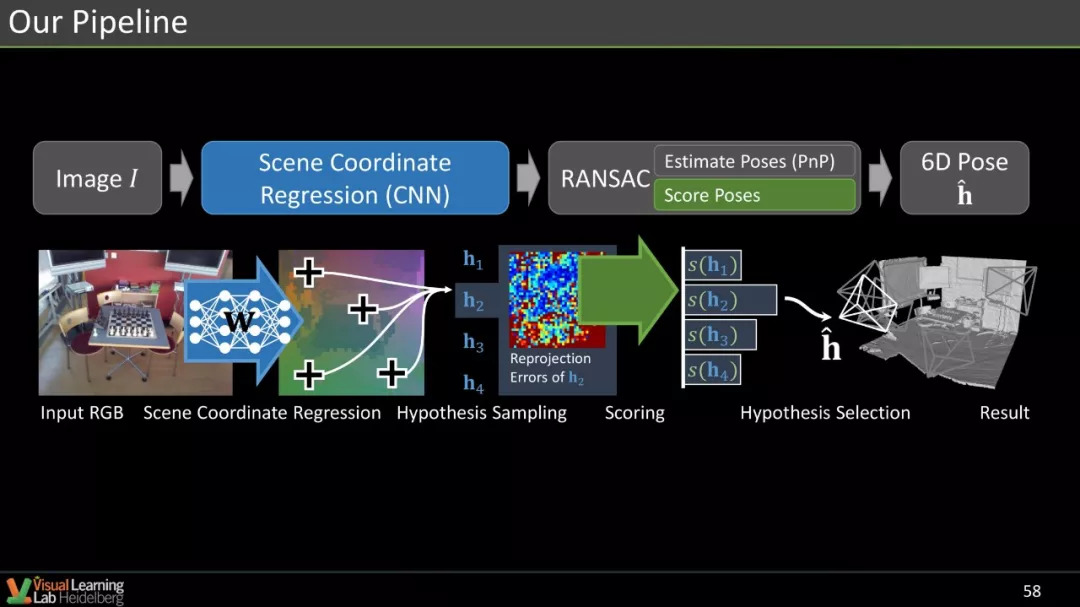
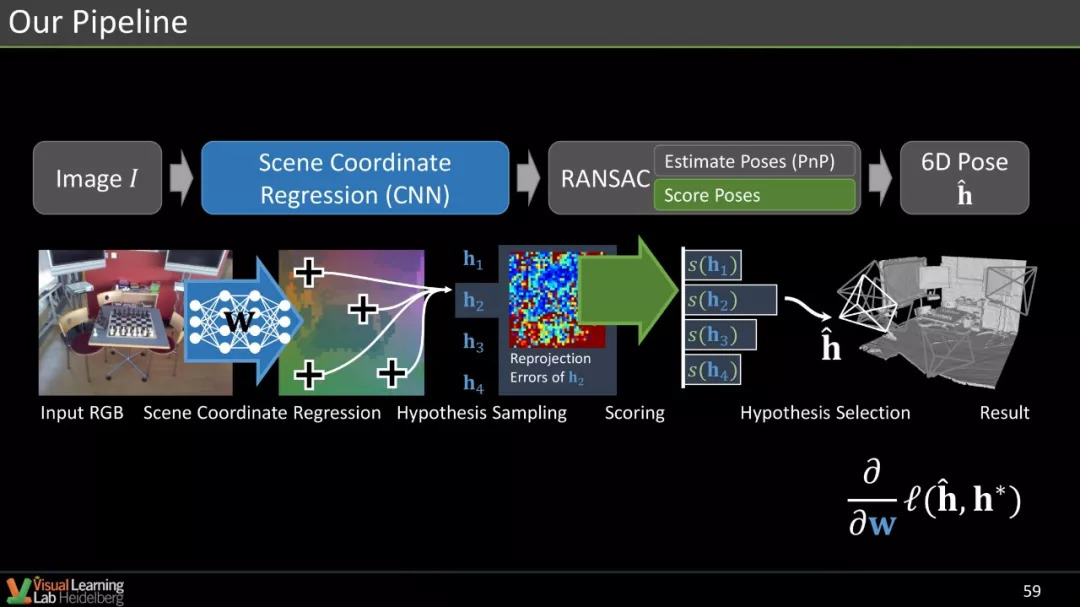
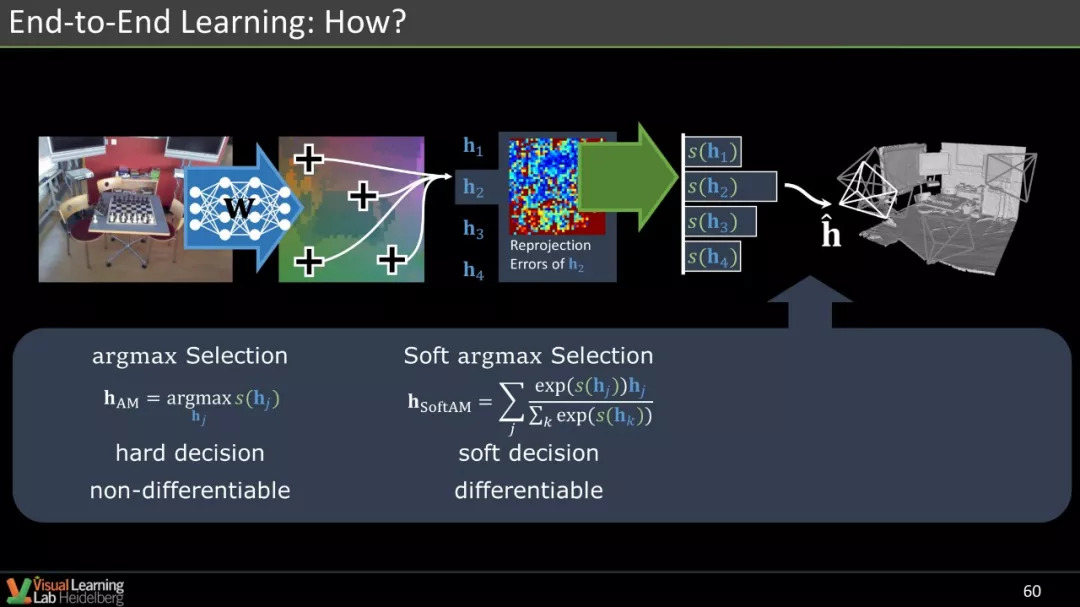
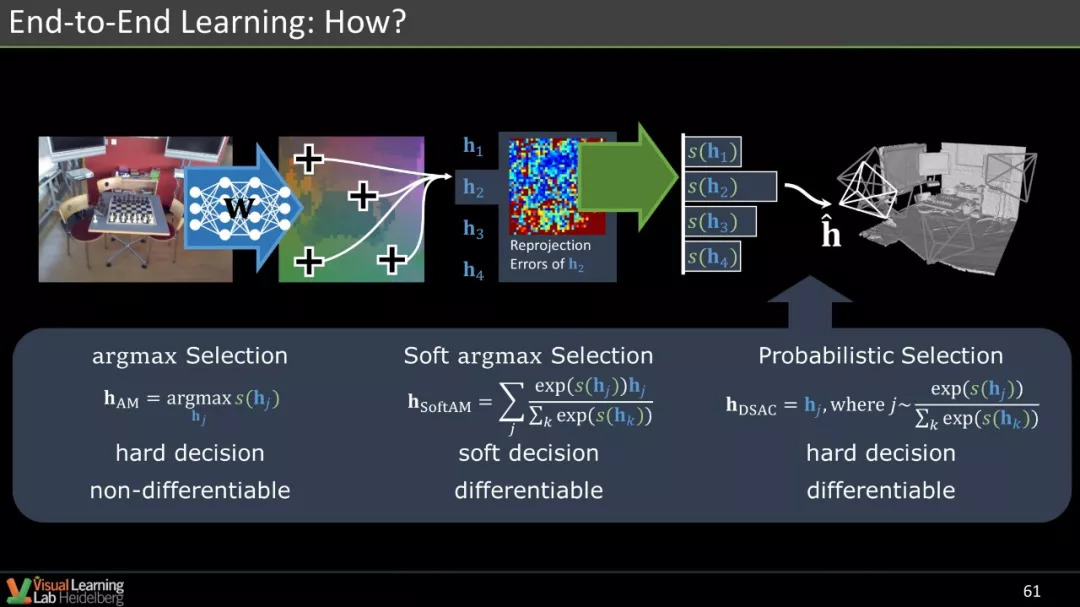
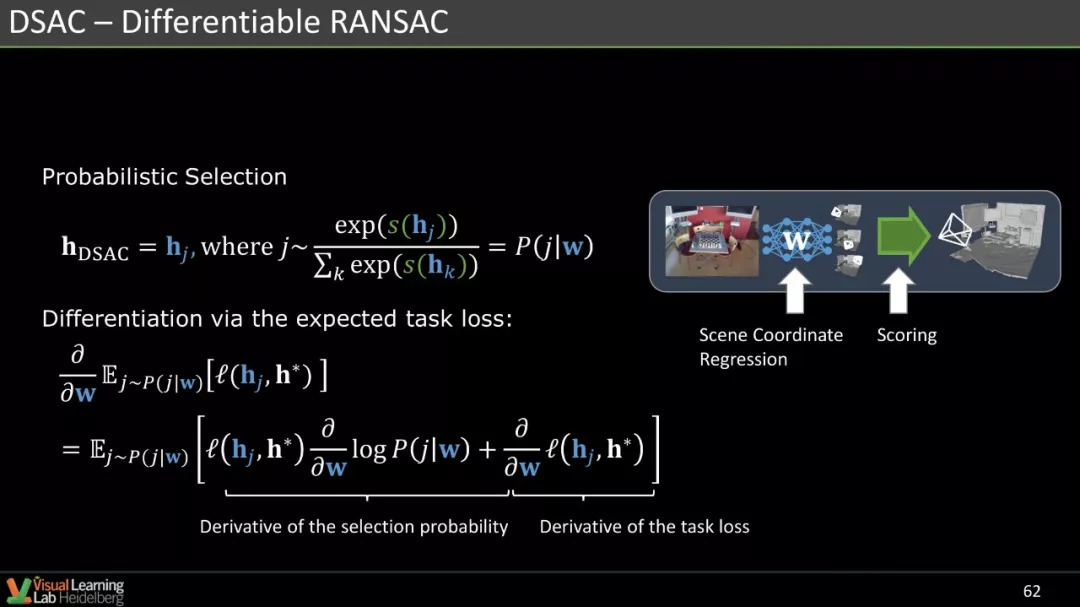
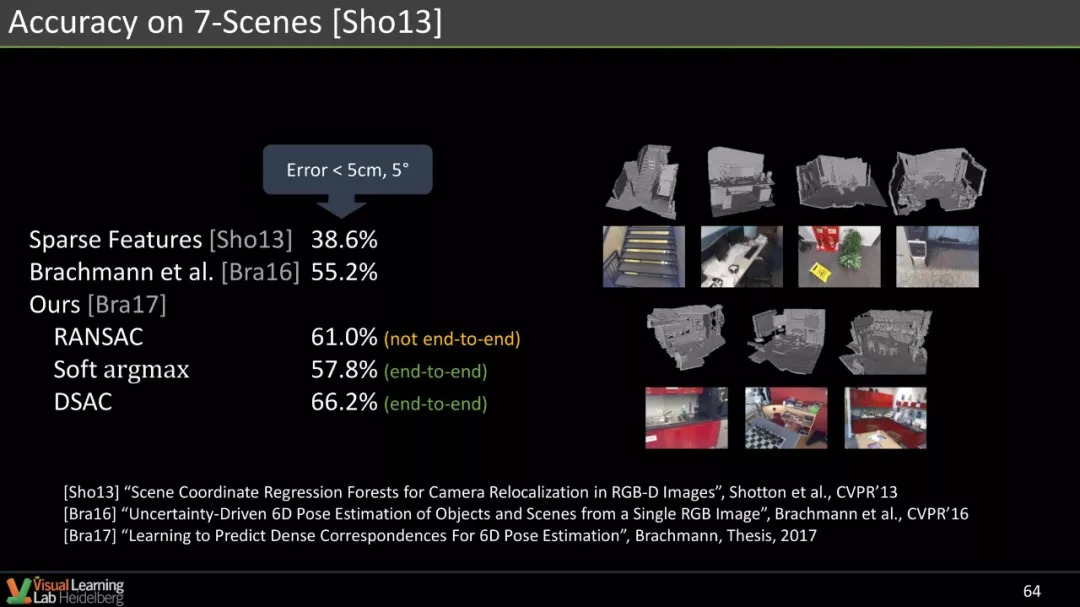
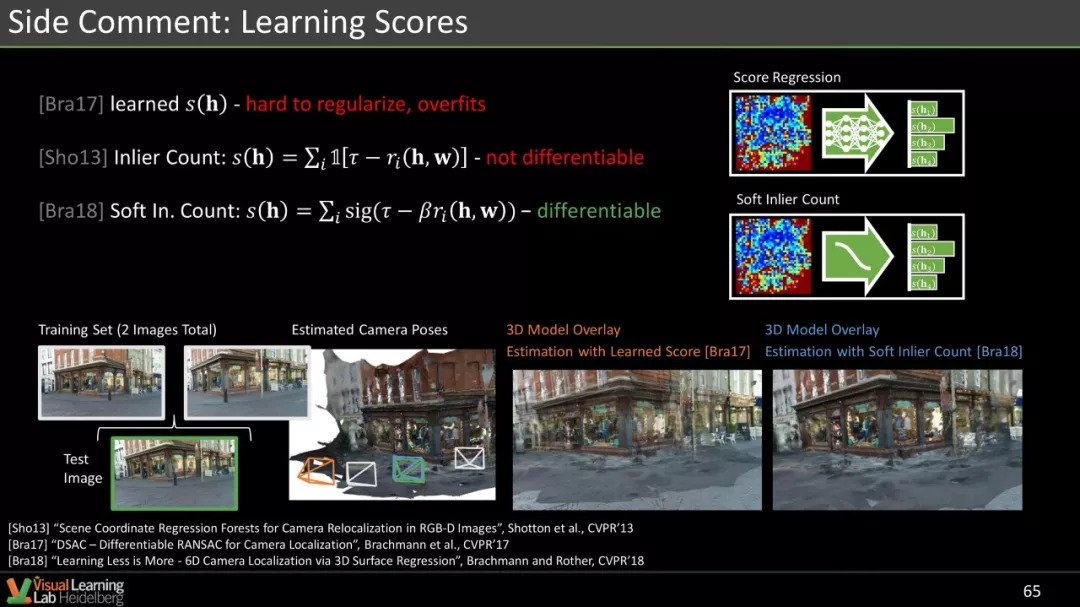
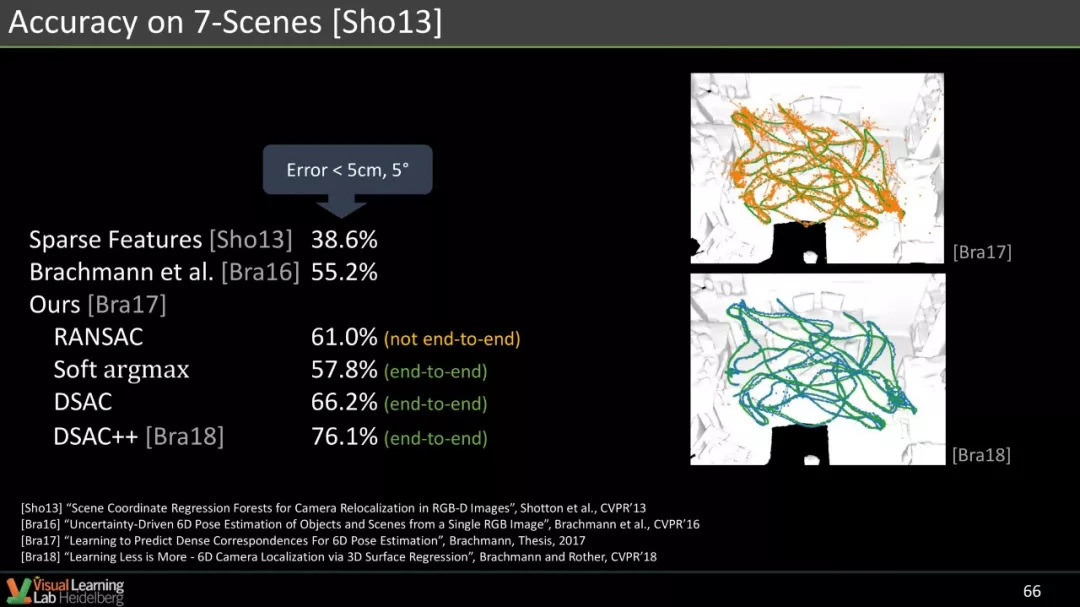
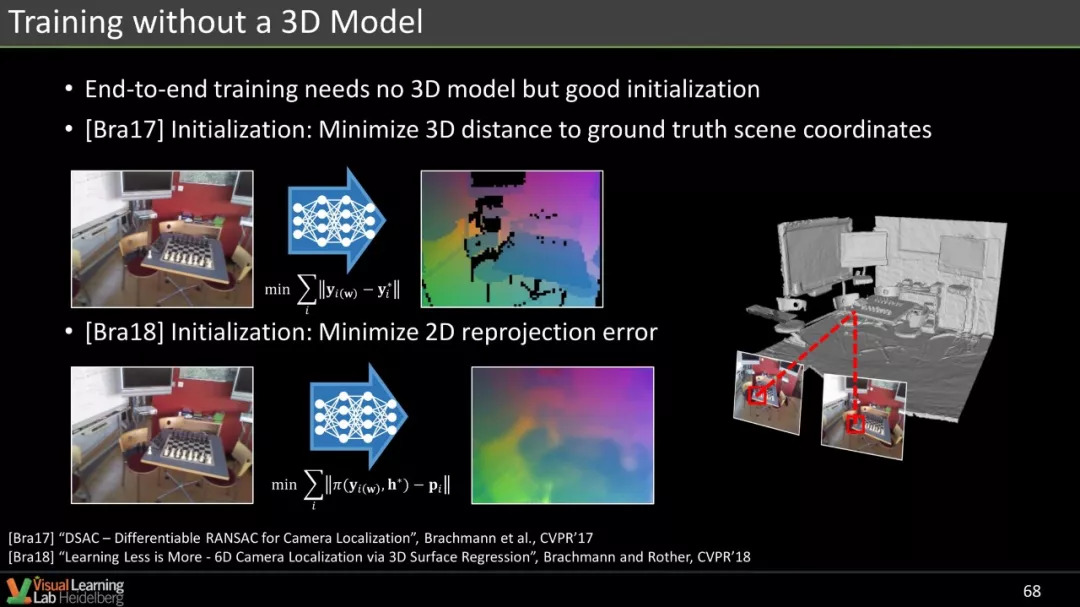
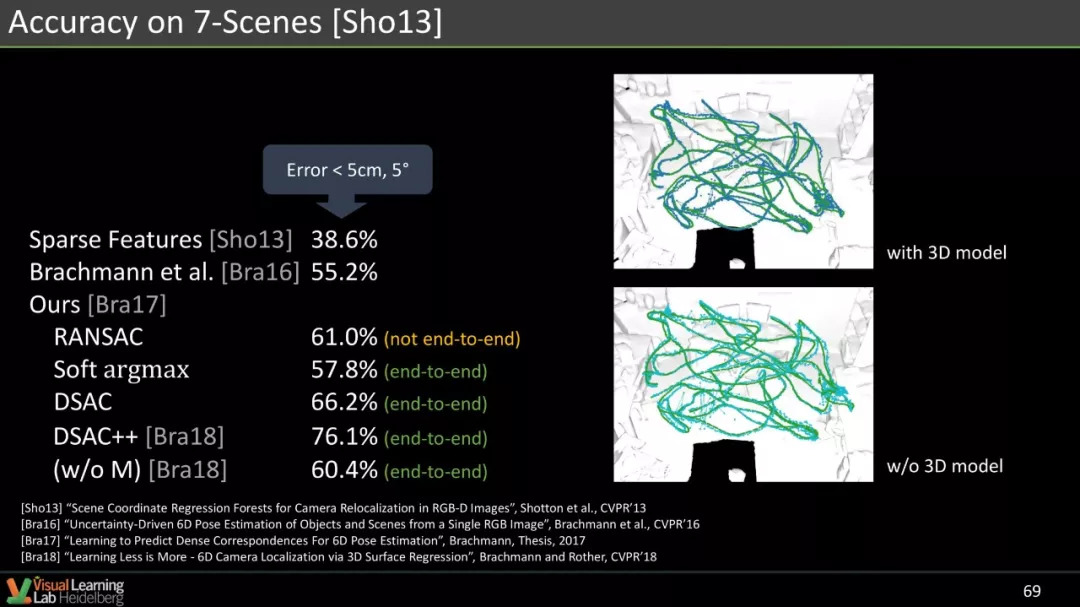
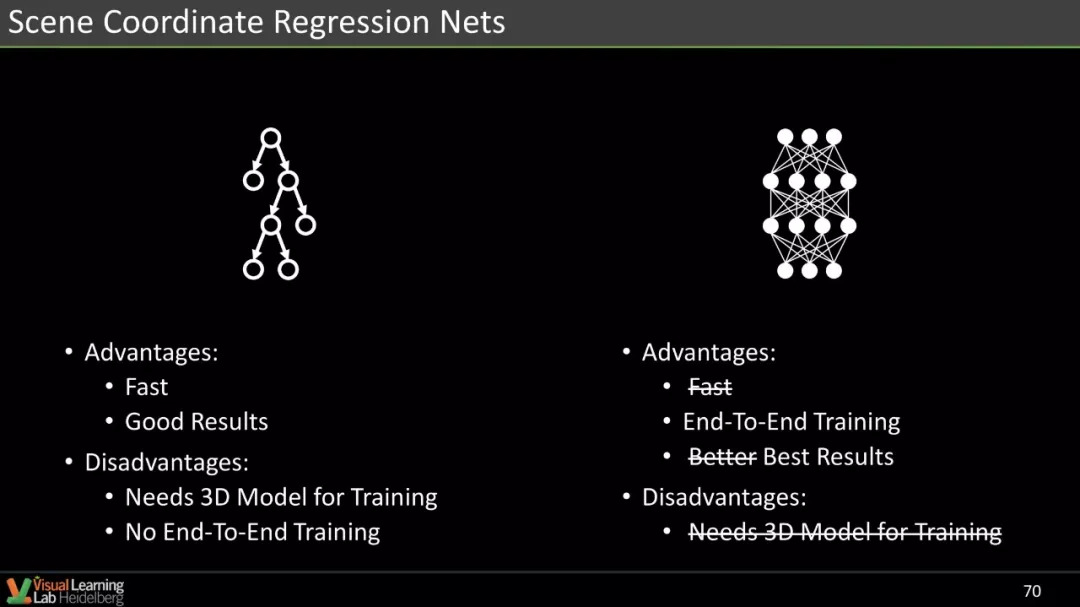
场景坐标回归
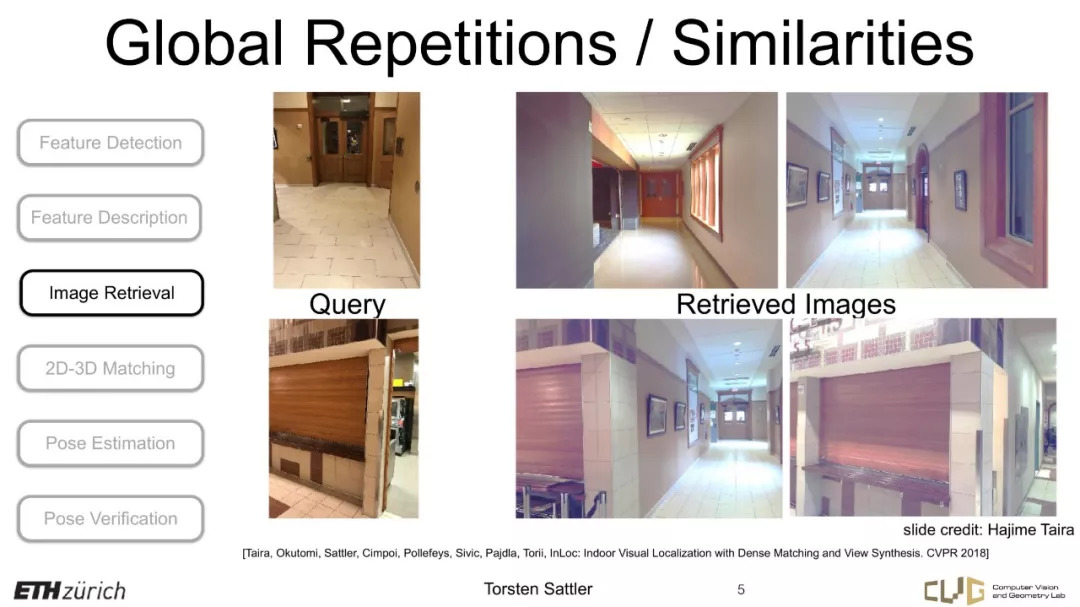
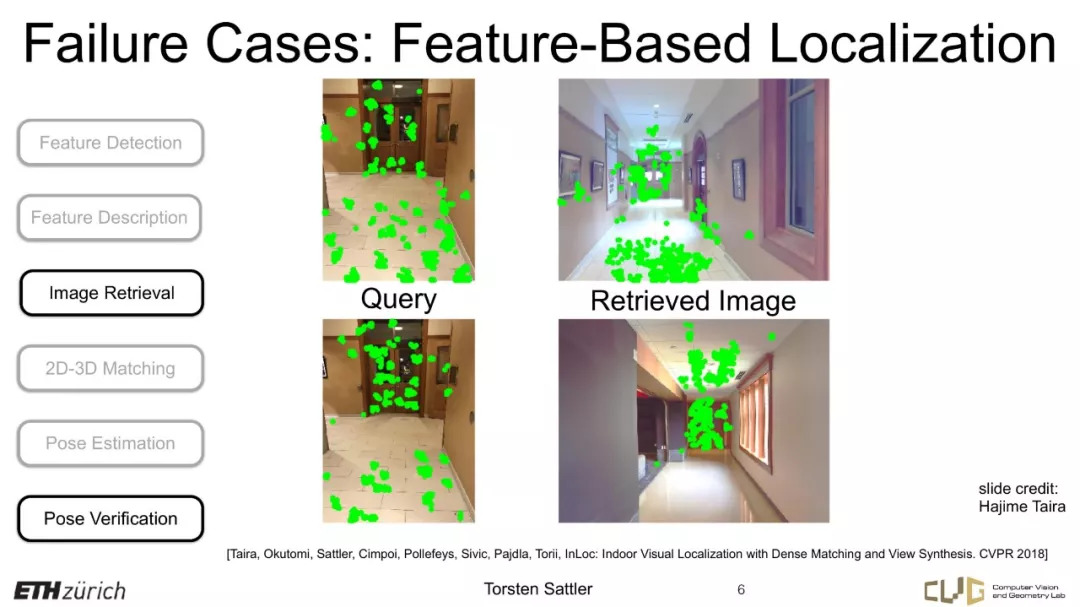
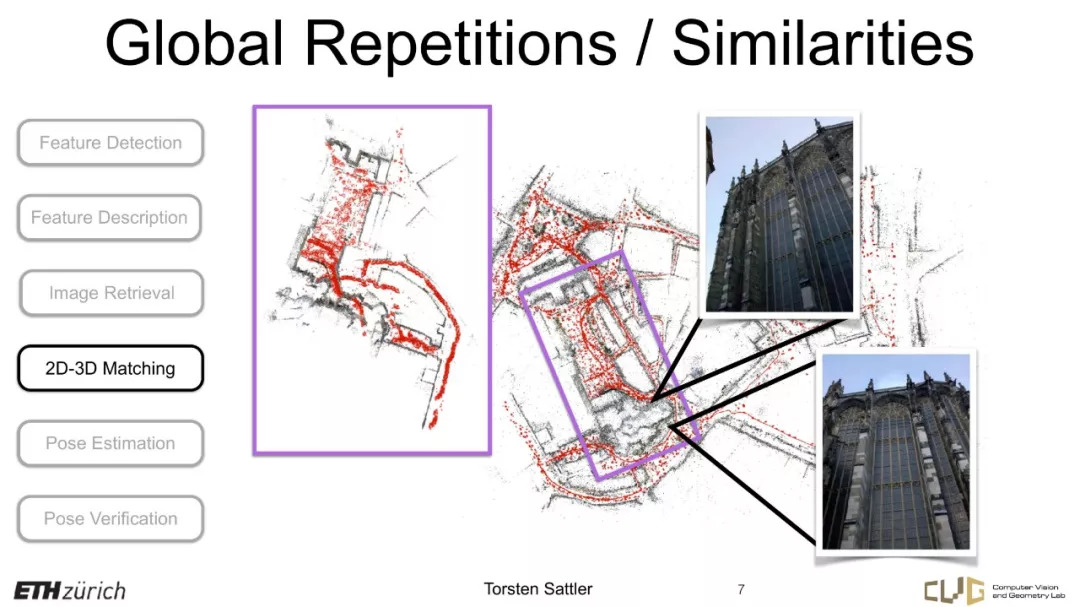
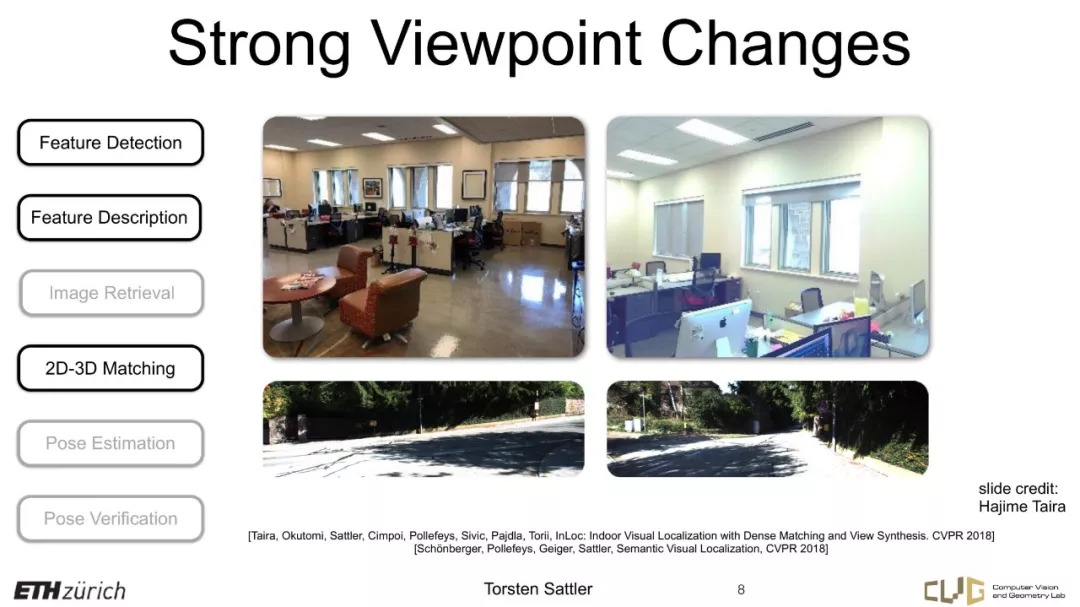
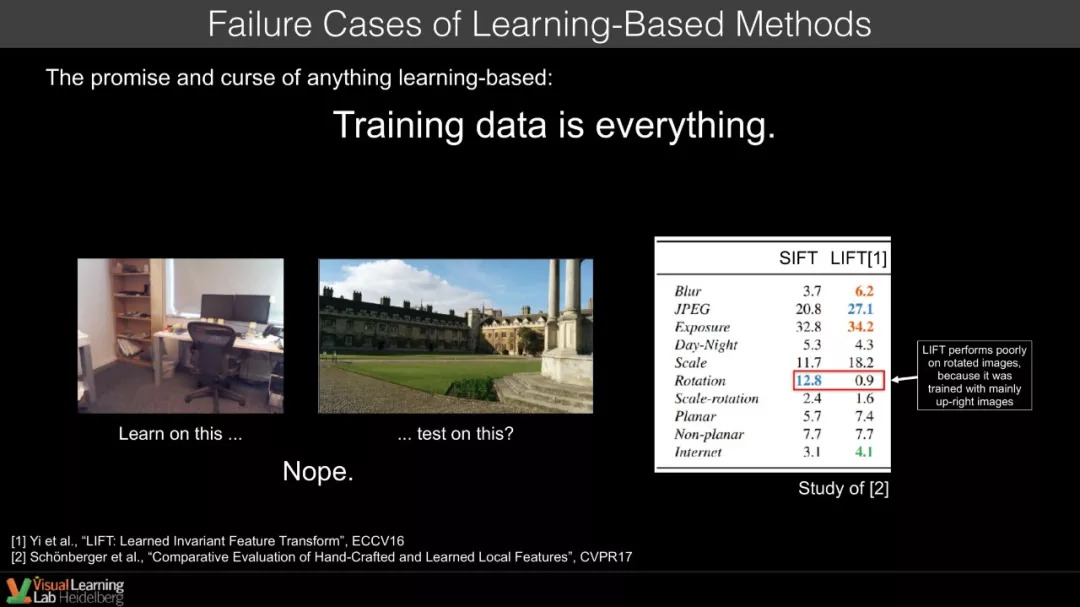
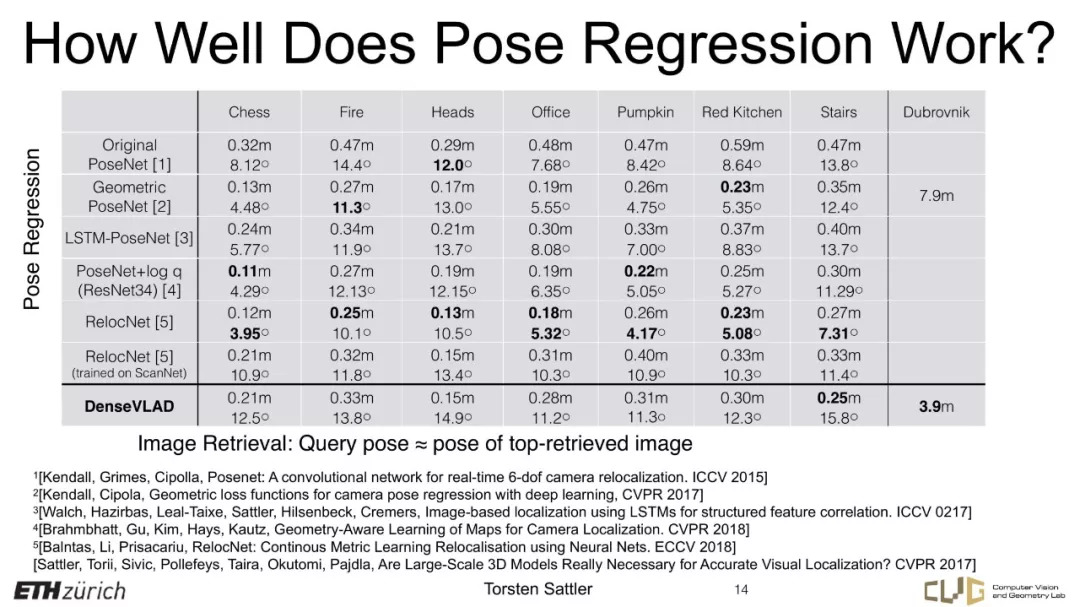
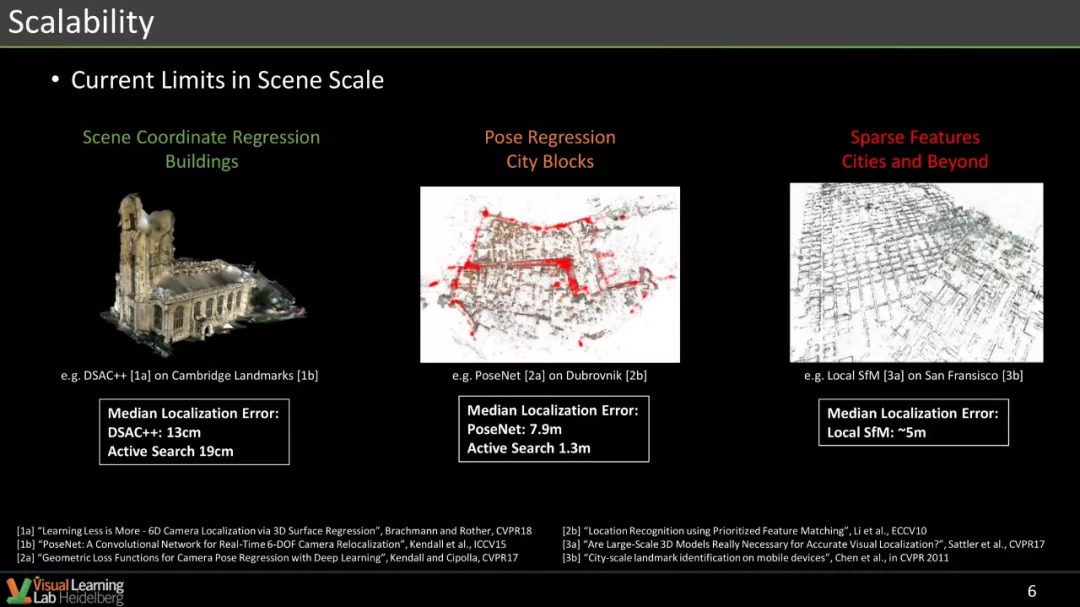
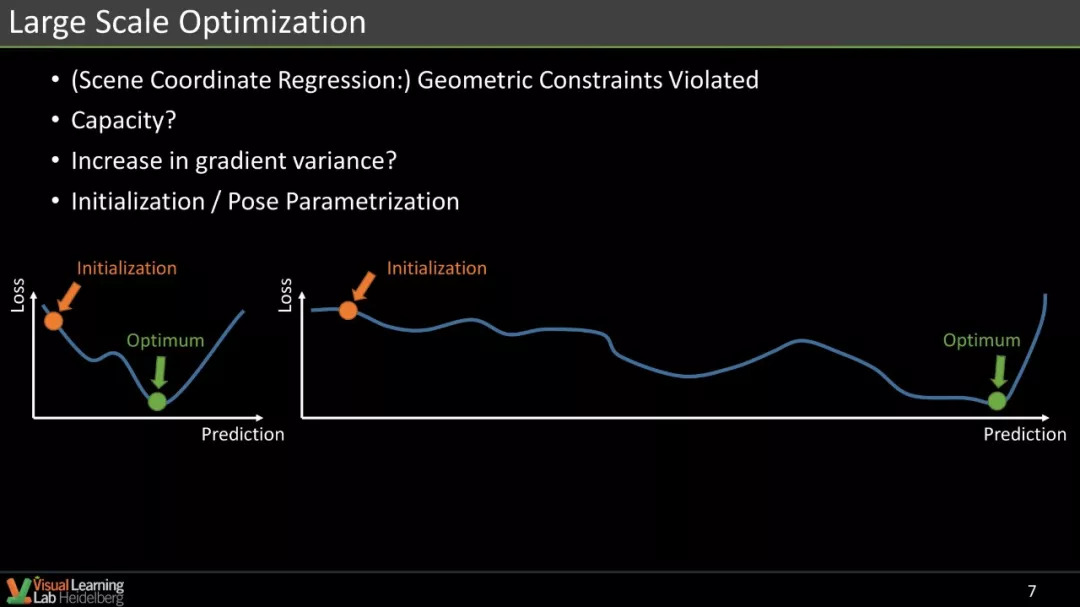
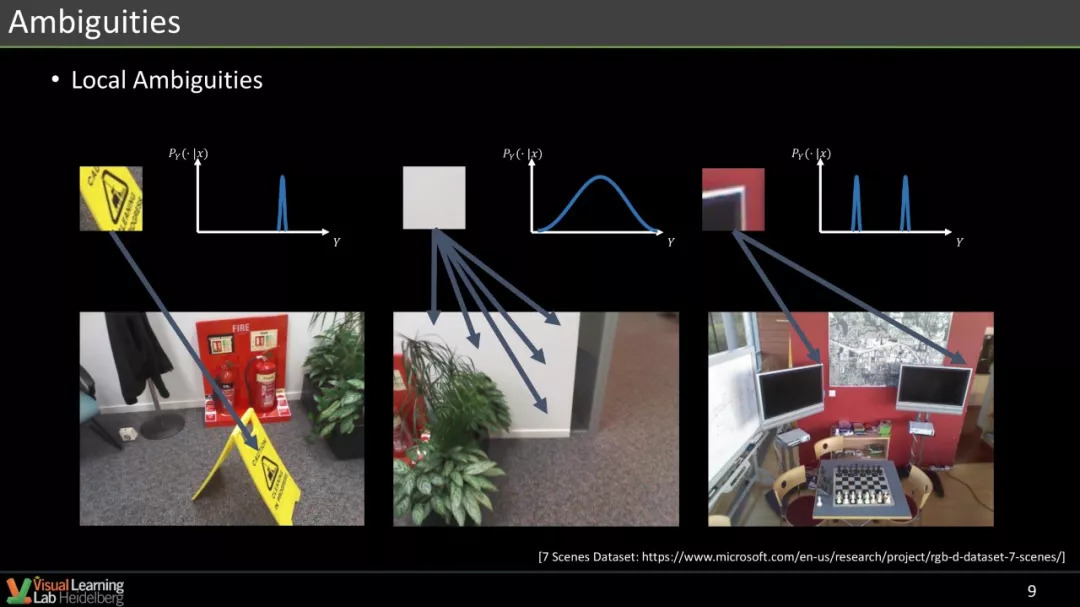
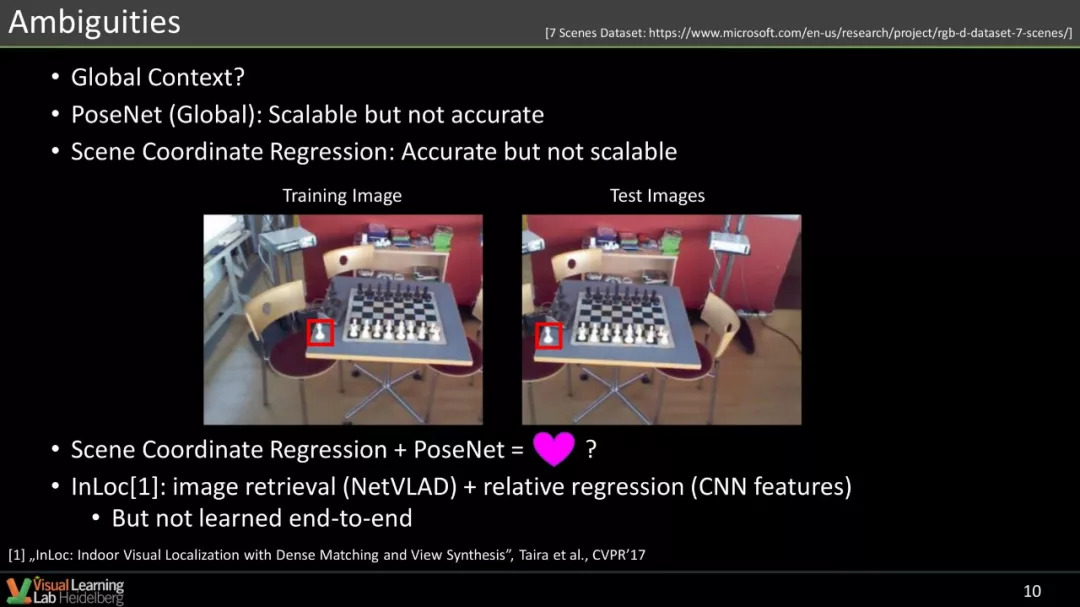
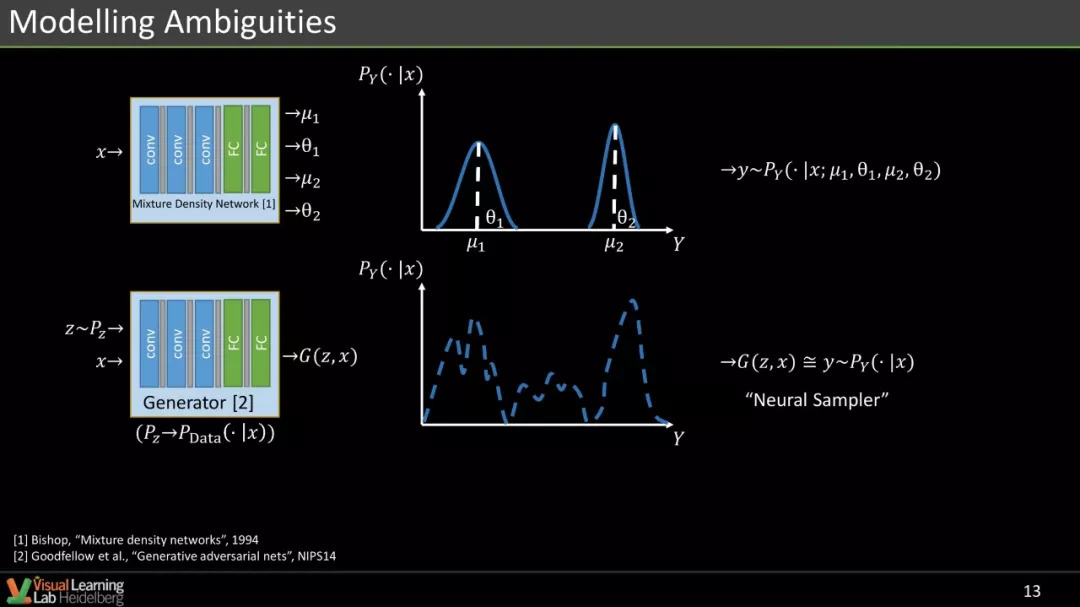
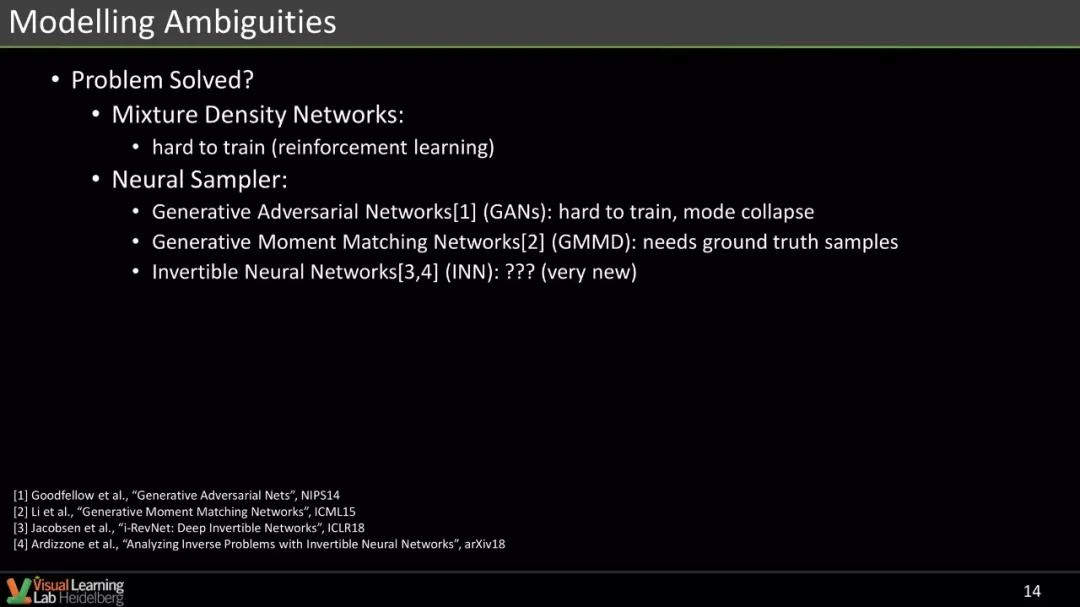
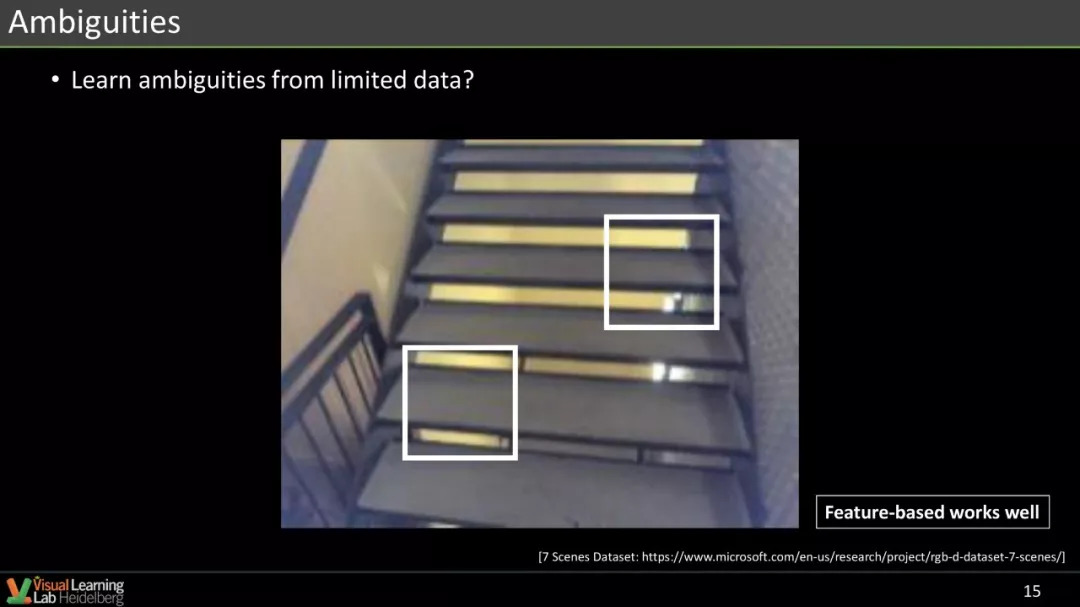
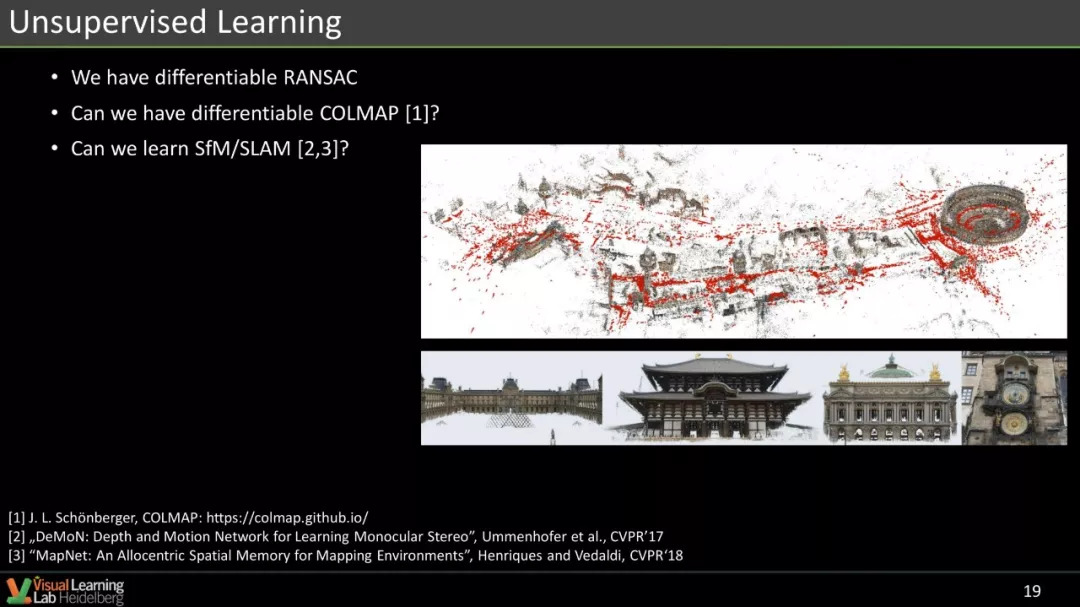
当前的问题
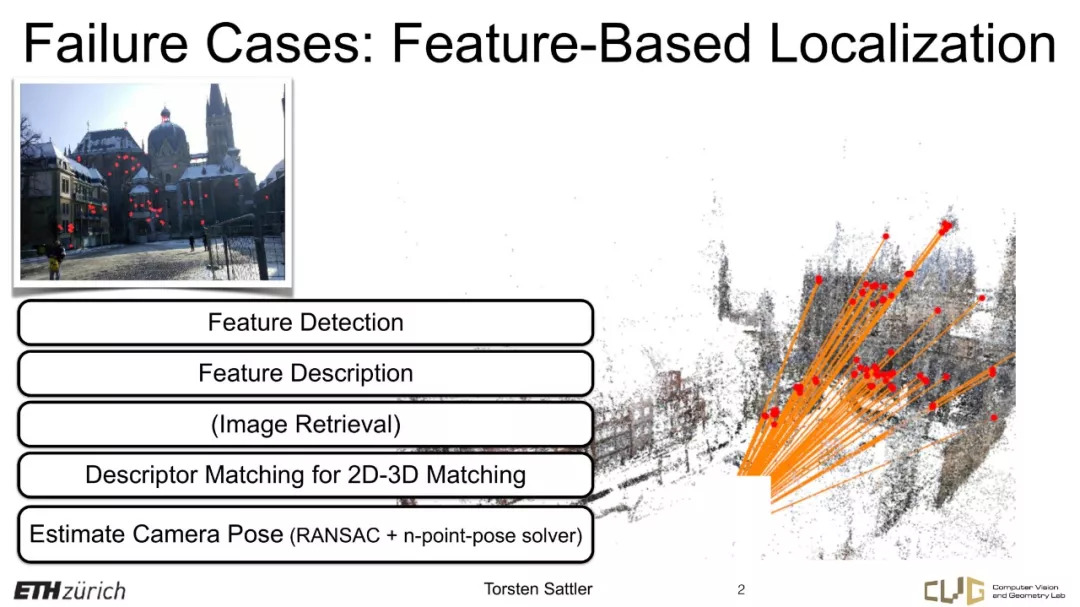
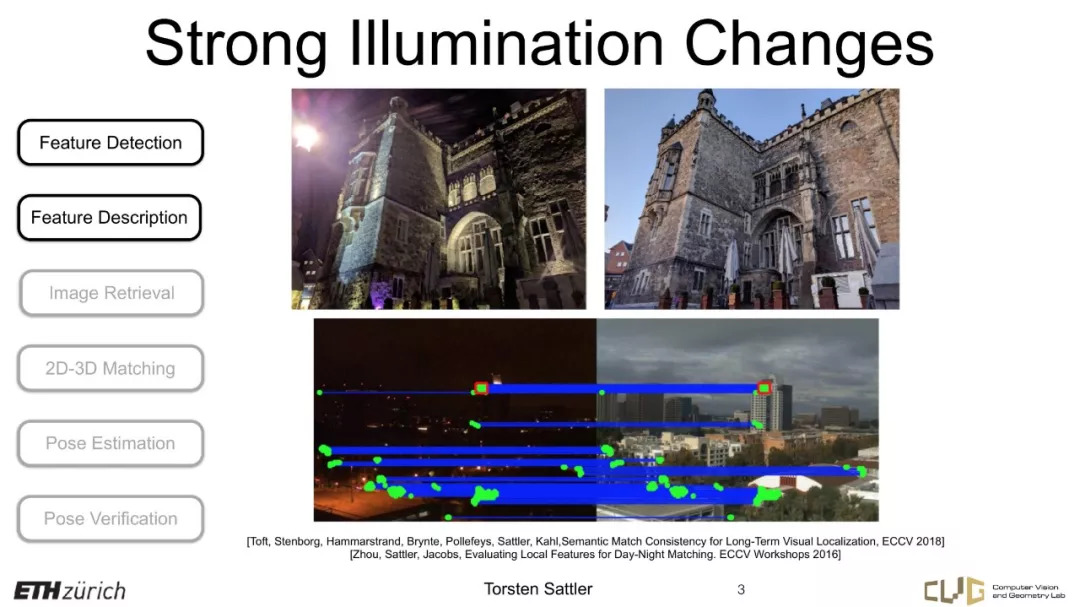
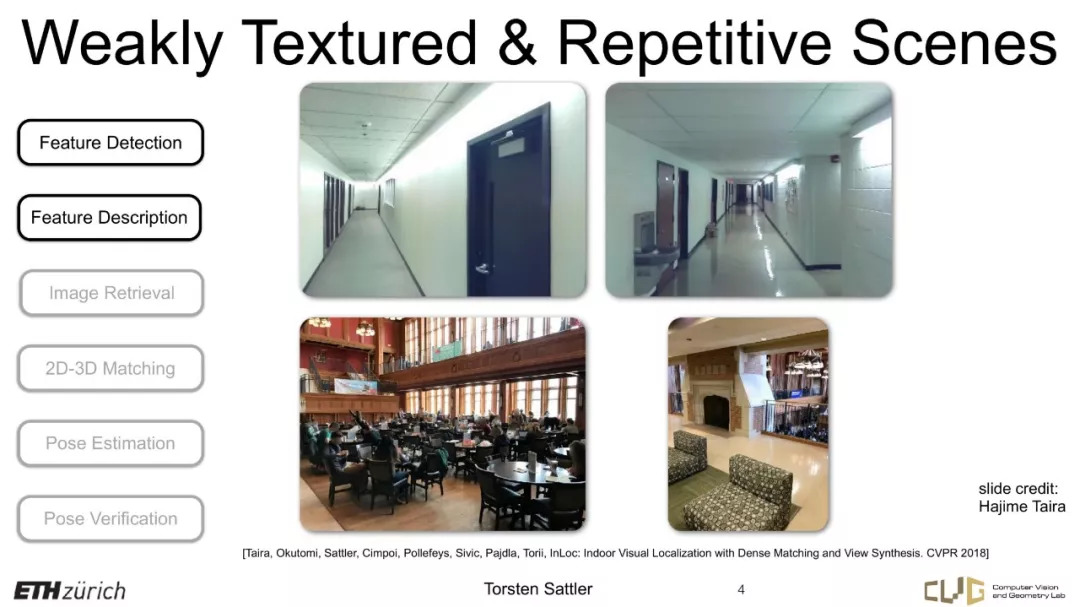
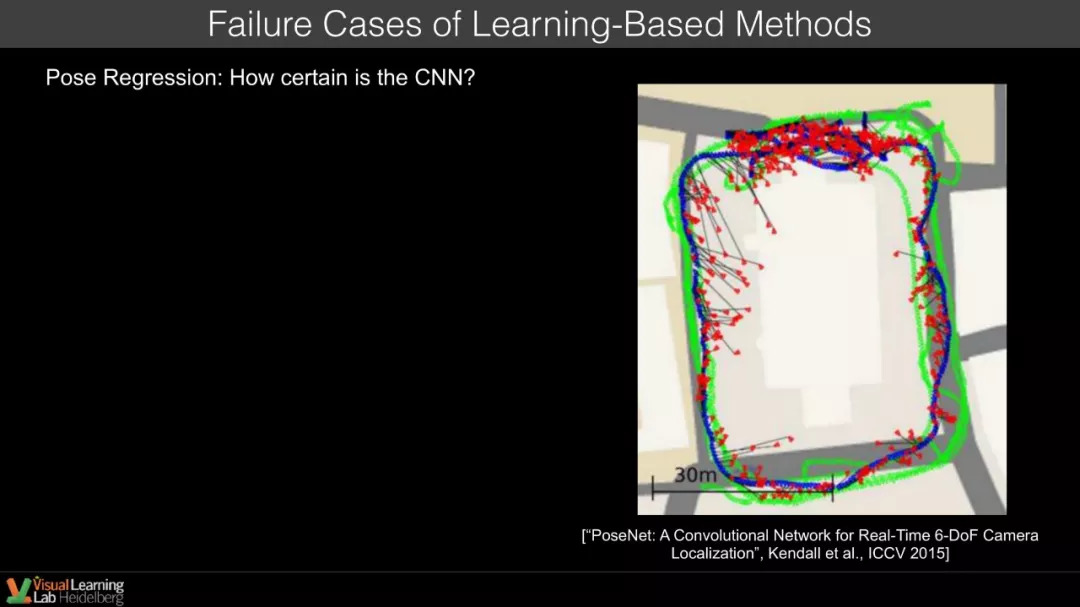
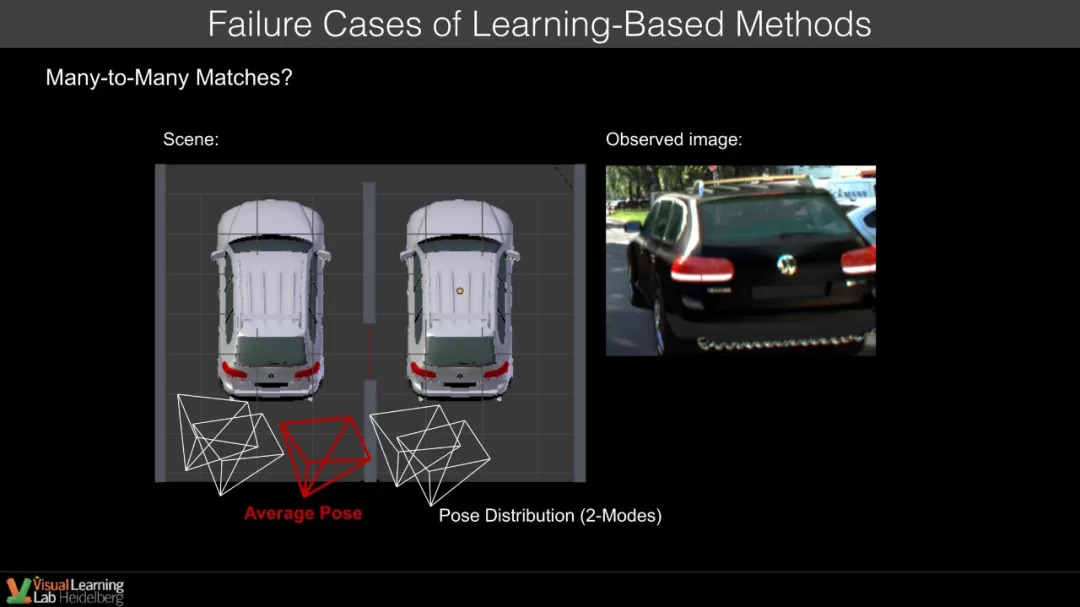
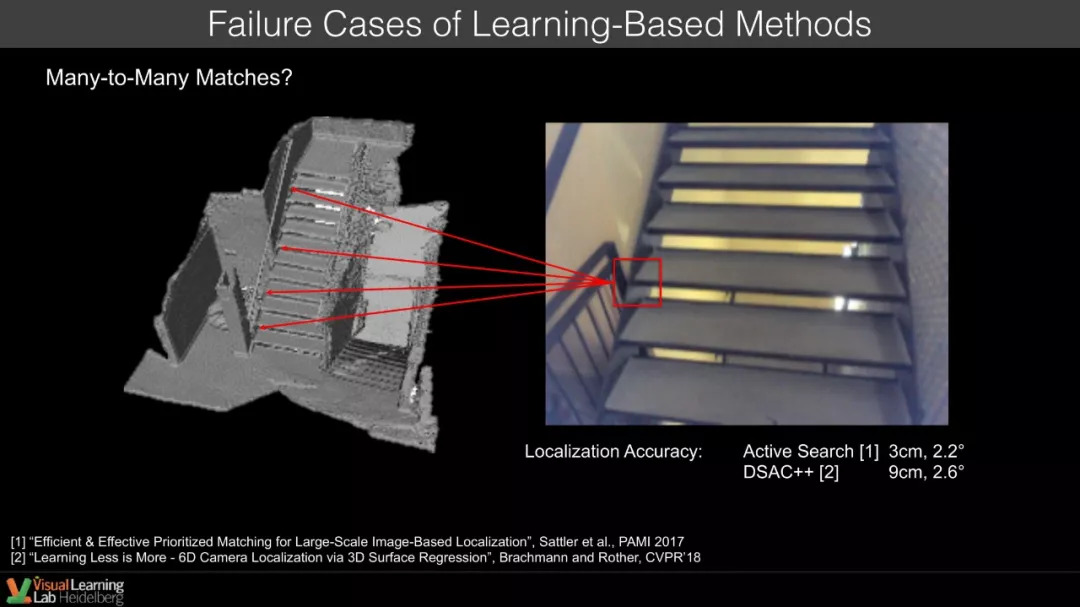
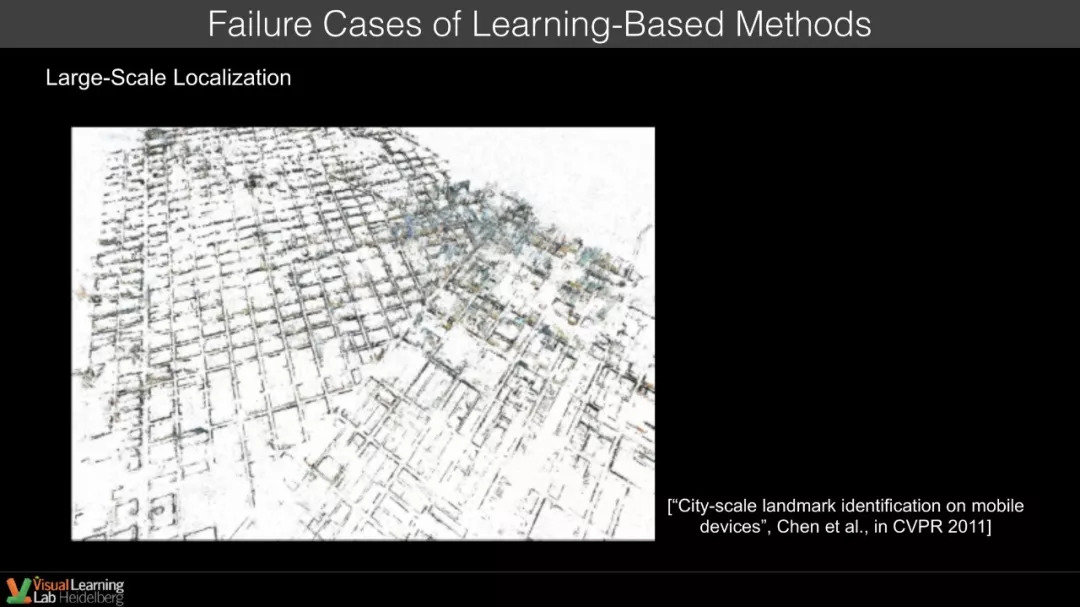
基于特征和学习方法的失败案例
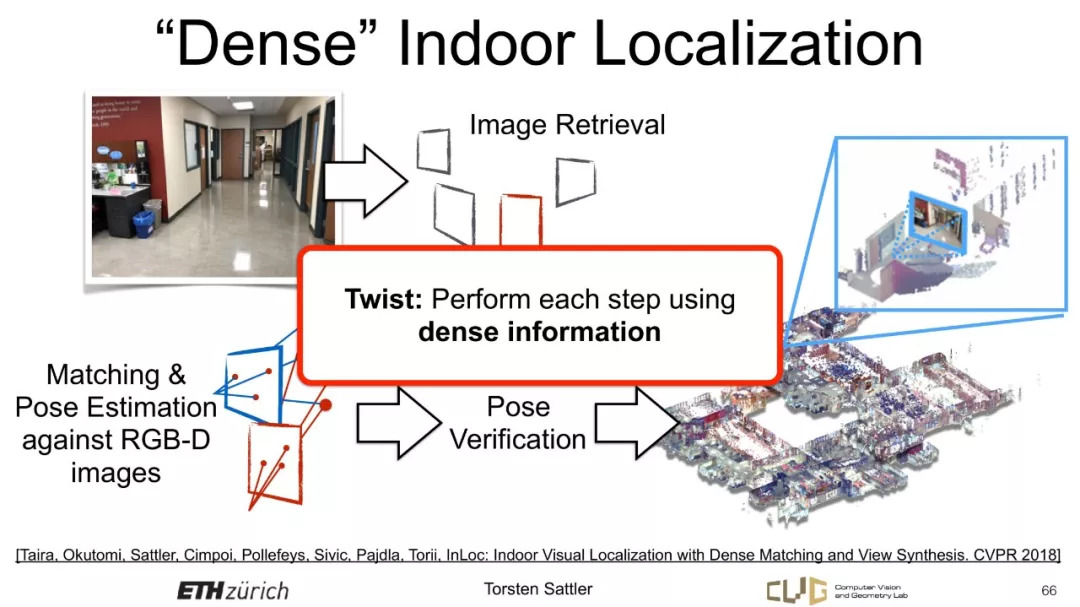
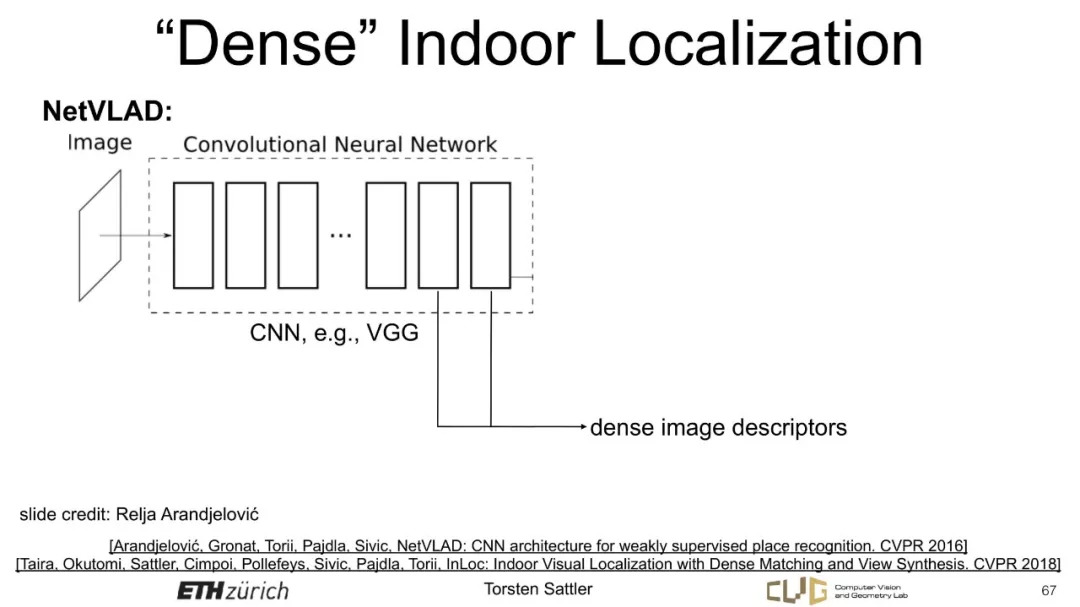
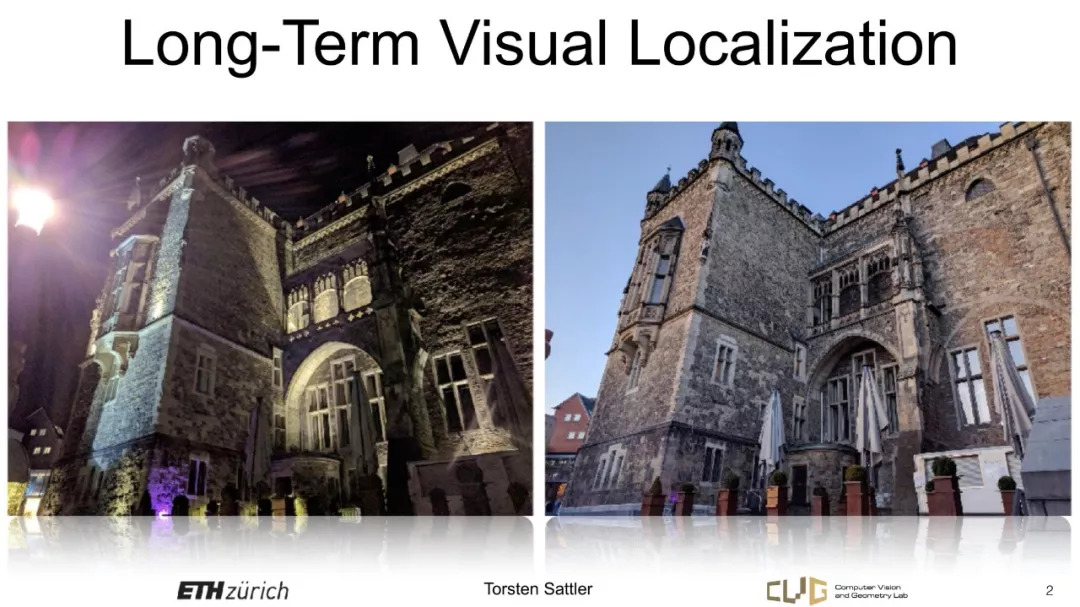
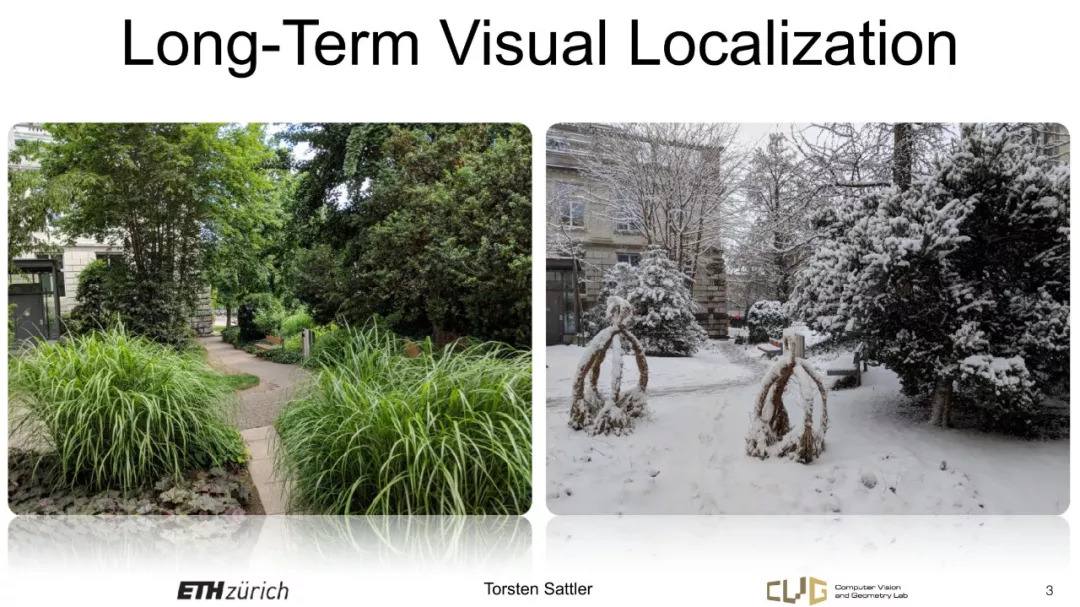
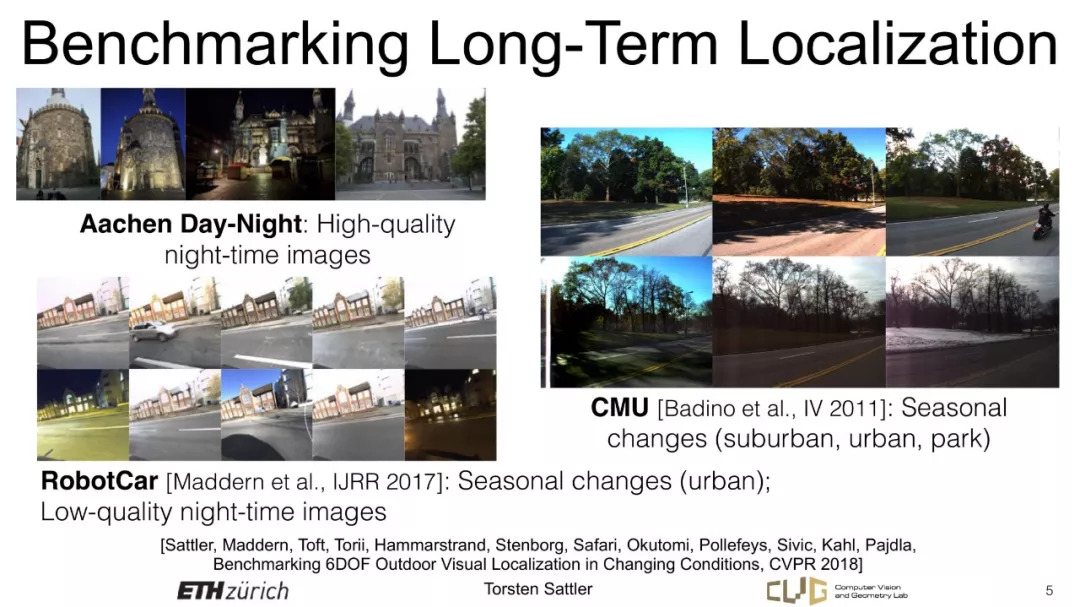
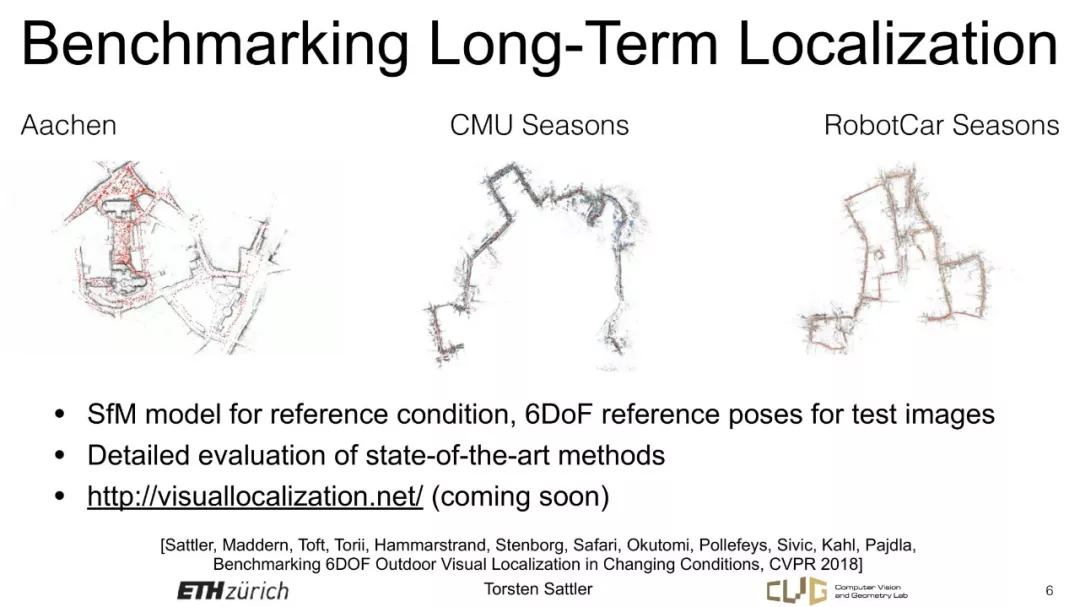
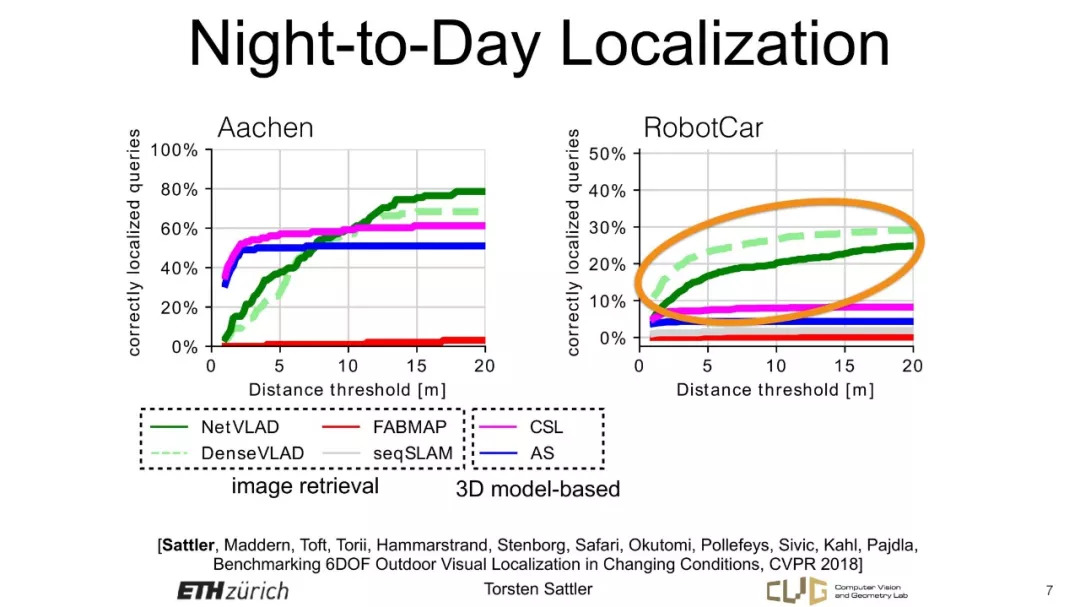
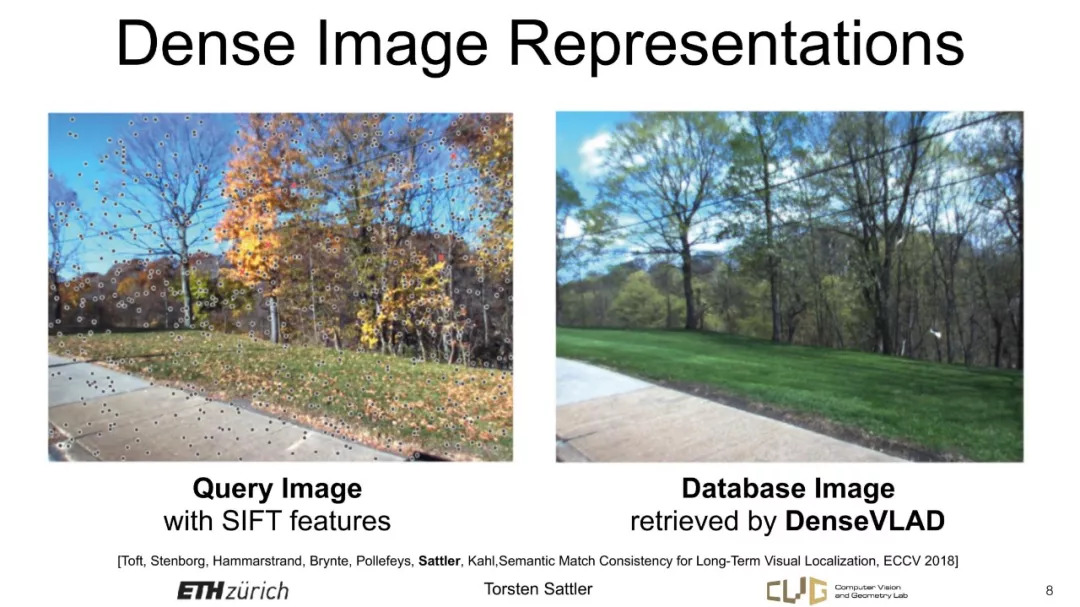
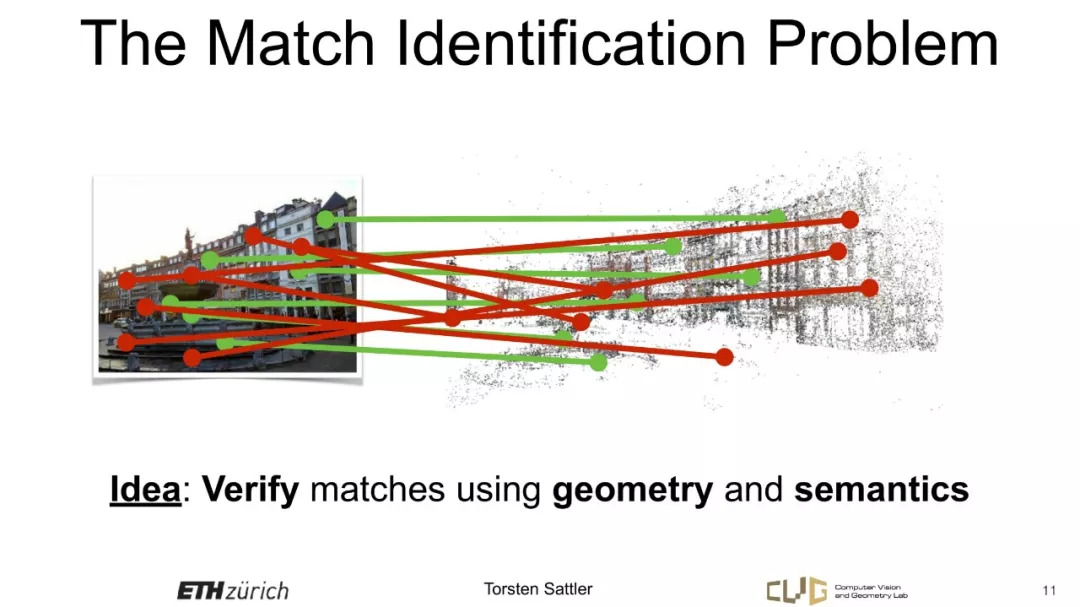
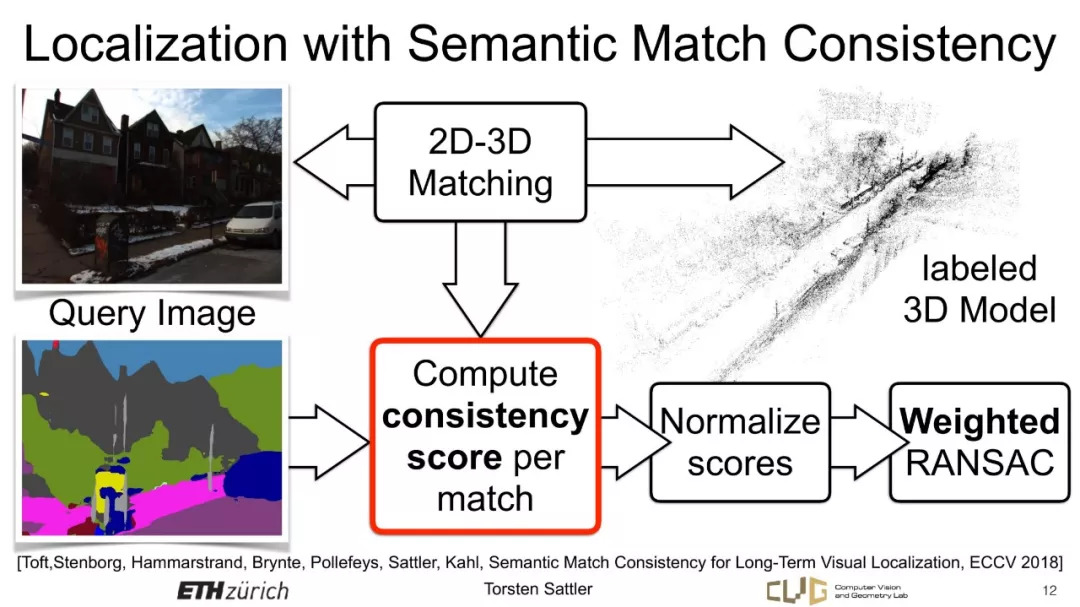
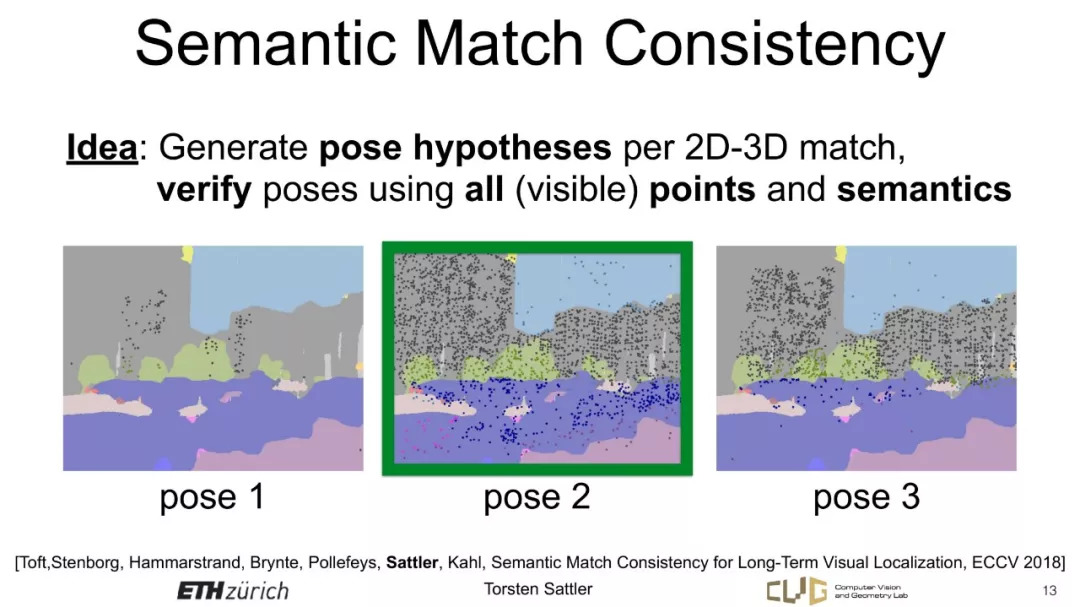
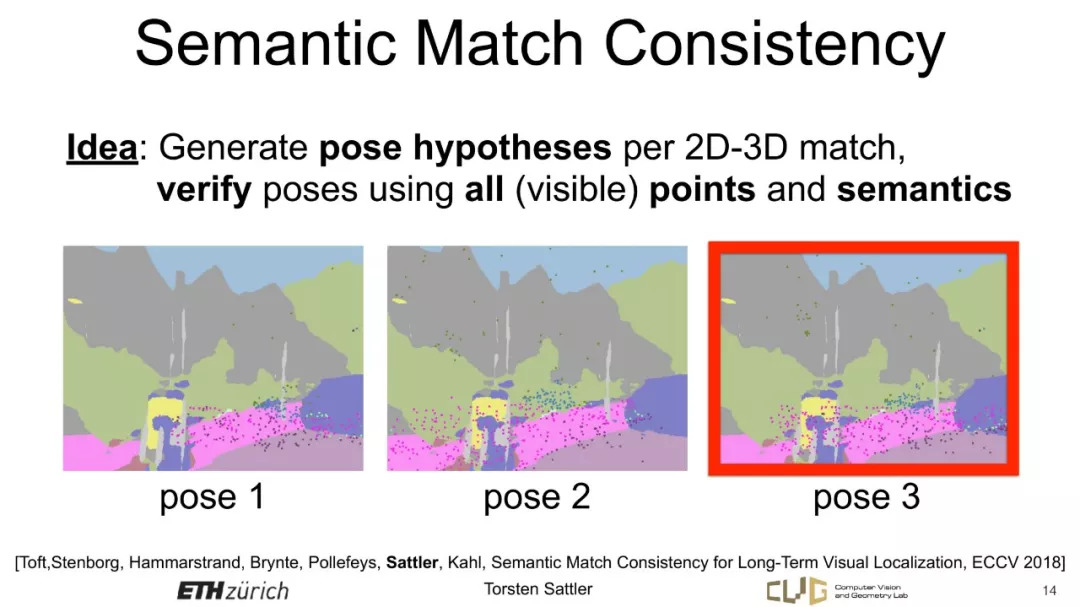
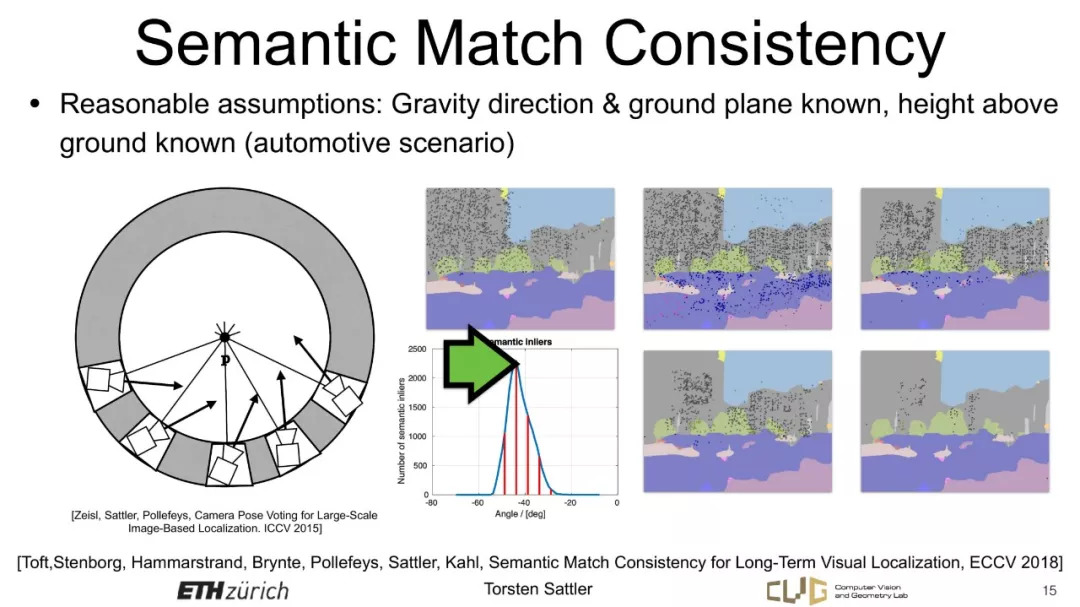
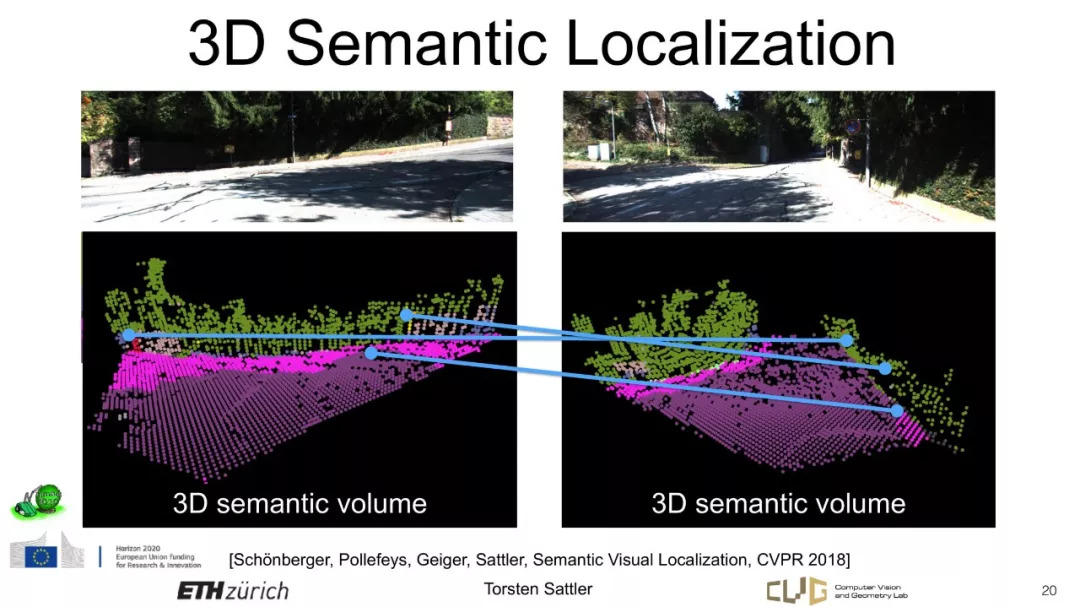
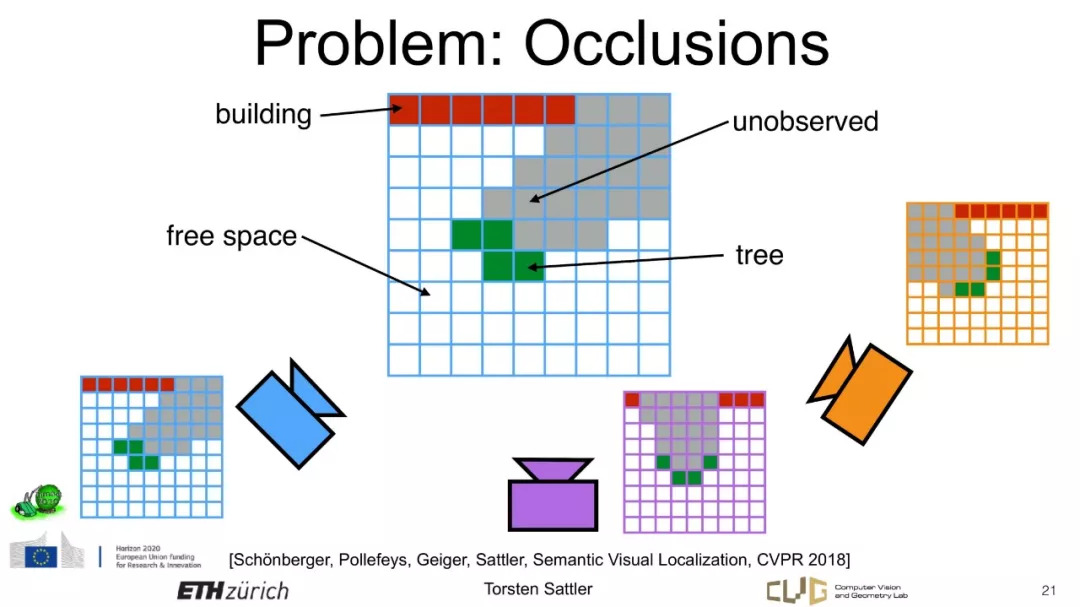
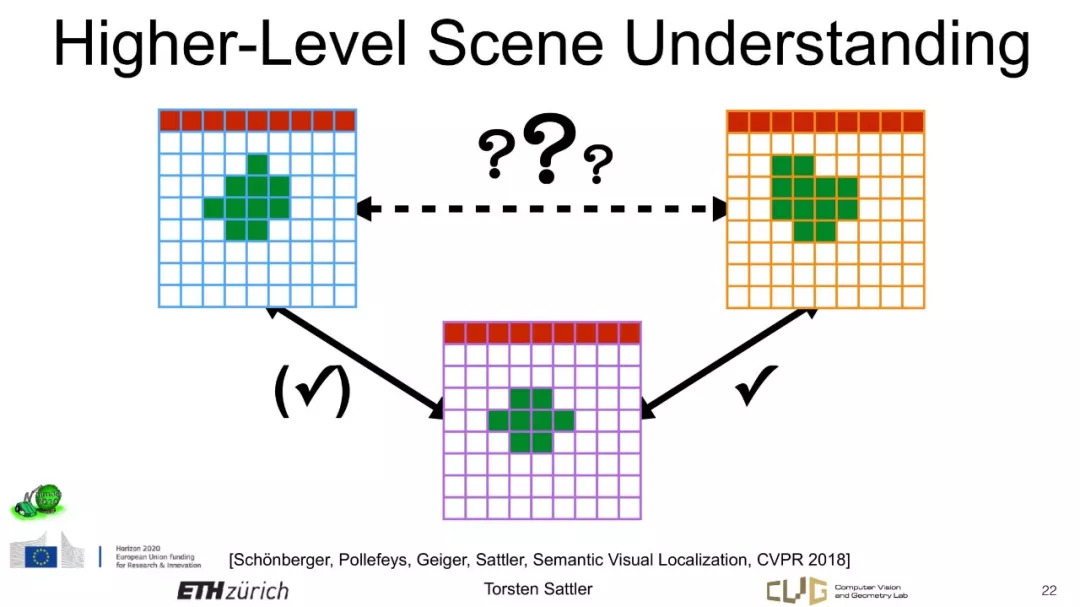
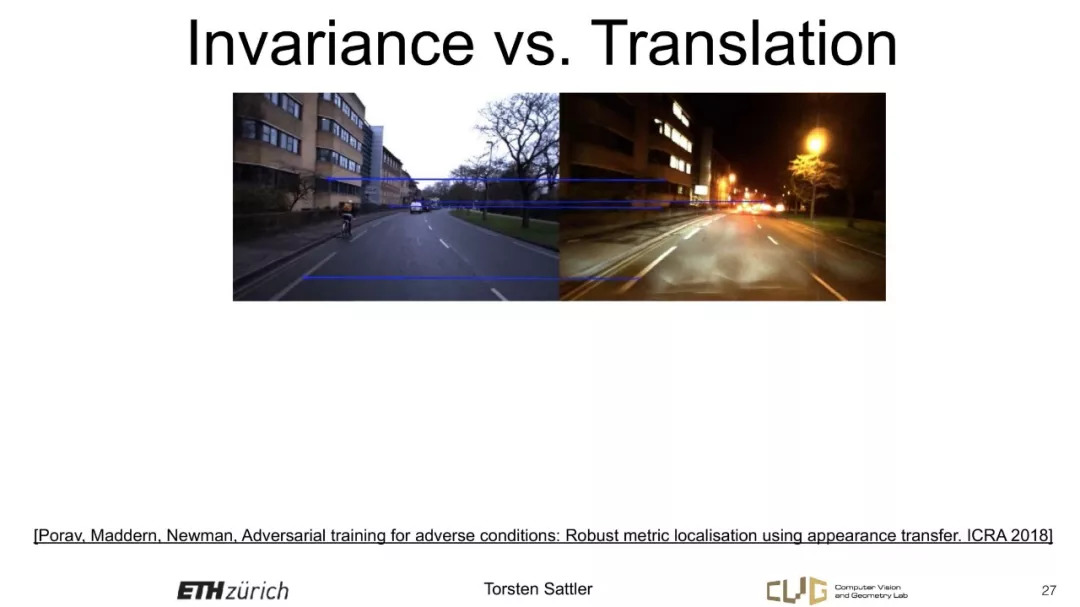
长期定位:走向更高层次的场景理解
学习方法的开放性问题
请关注专知公众号(扫一扫最下面专知二维码,或者点击上方蓝色专知),
后台回复“eccvvl” 就可以获取教程下载链接~
附全文PPT:
介绍:




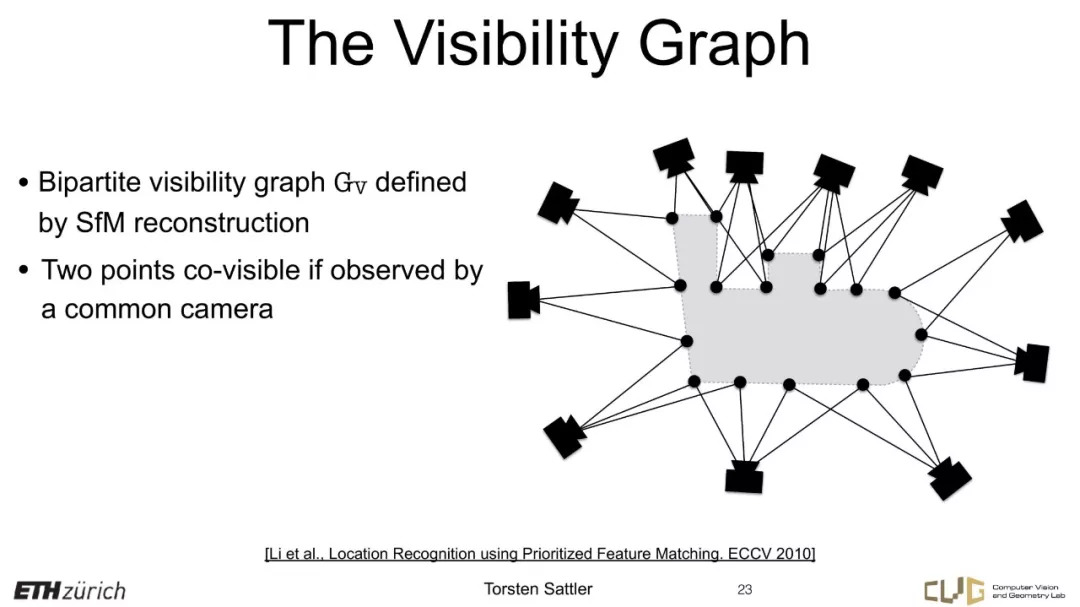
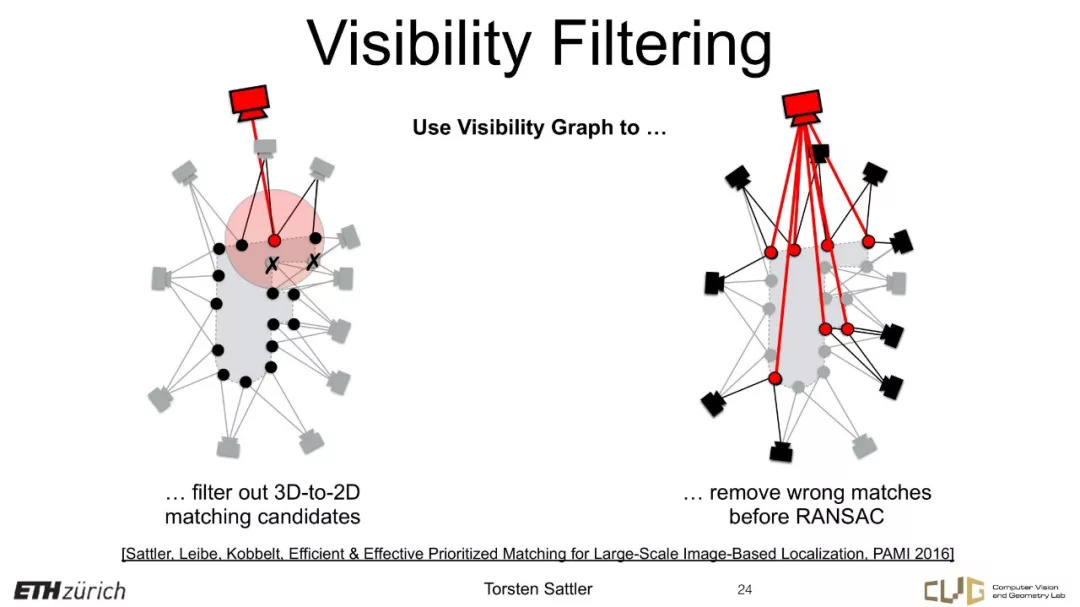
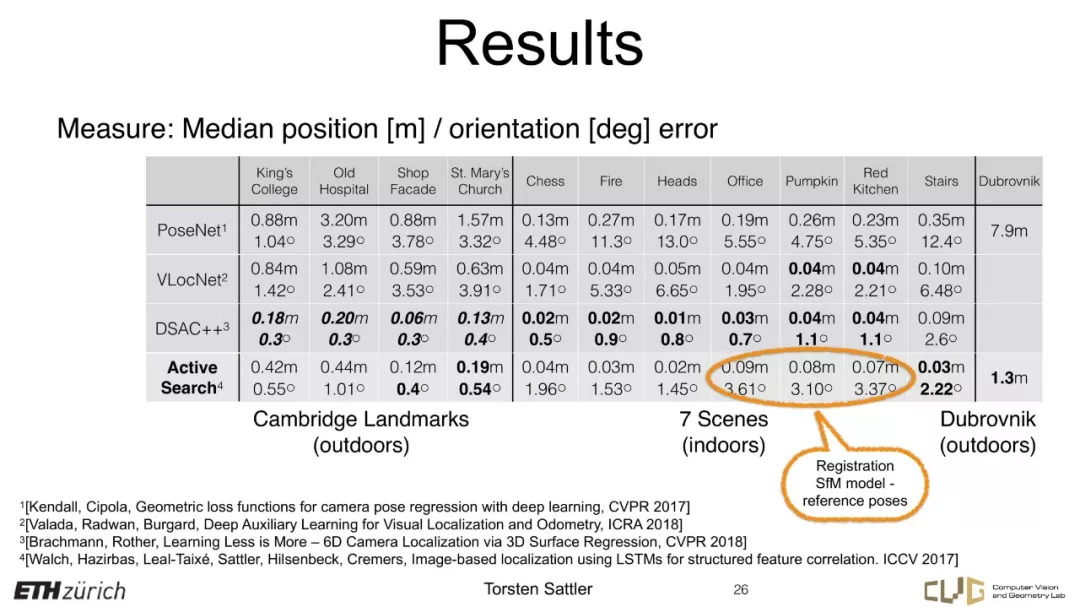
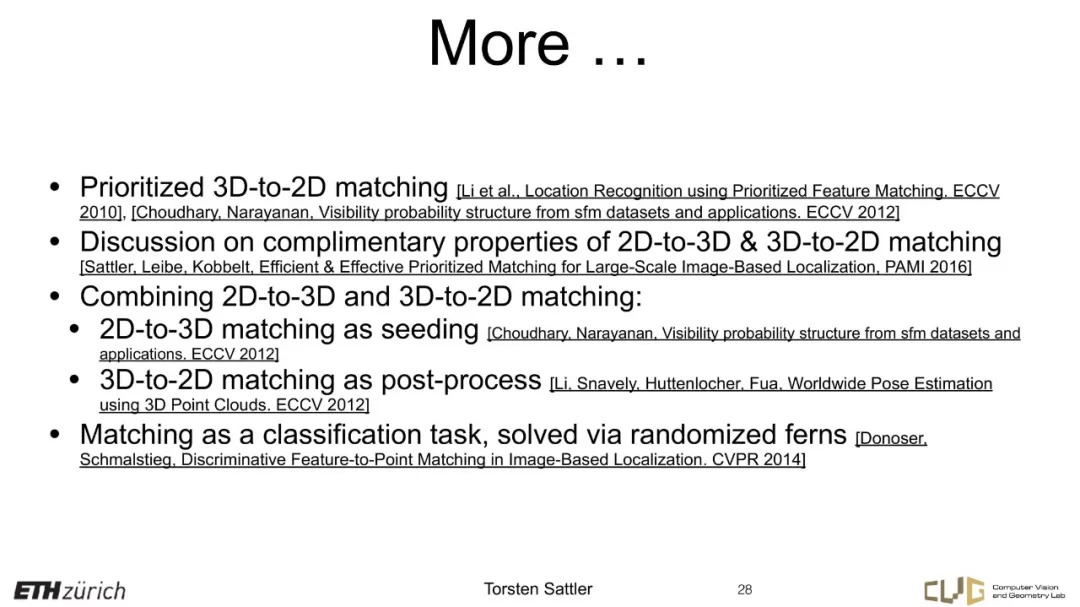
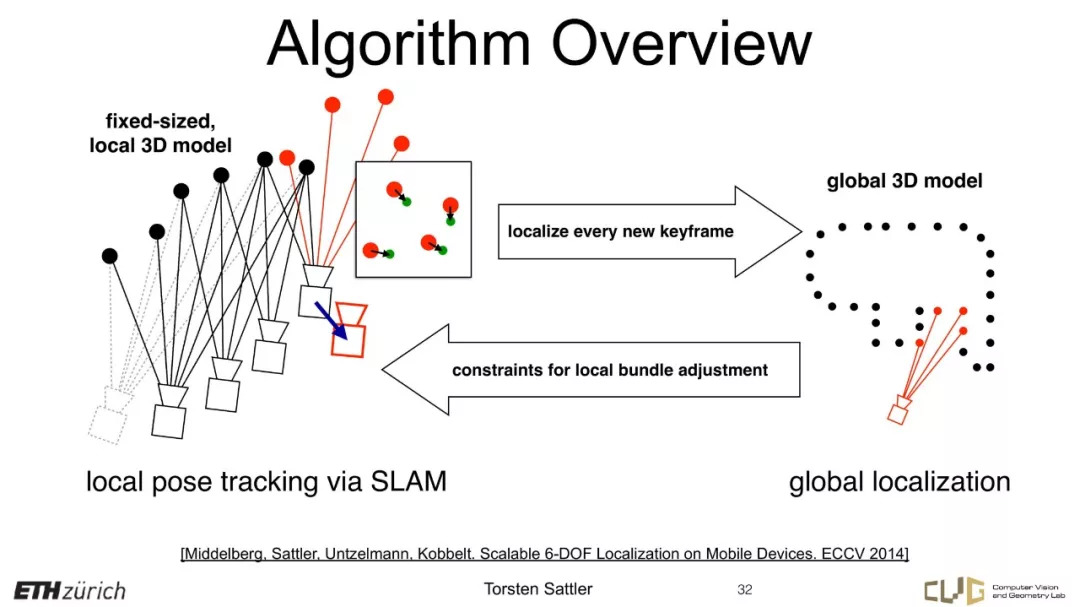
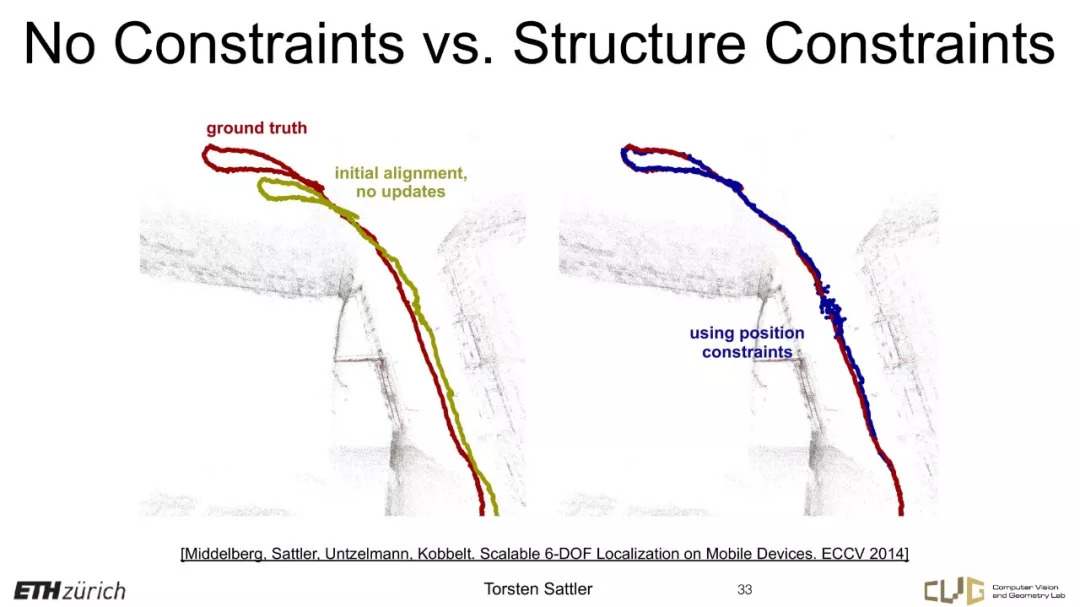
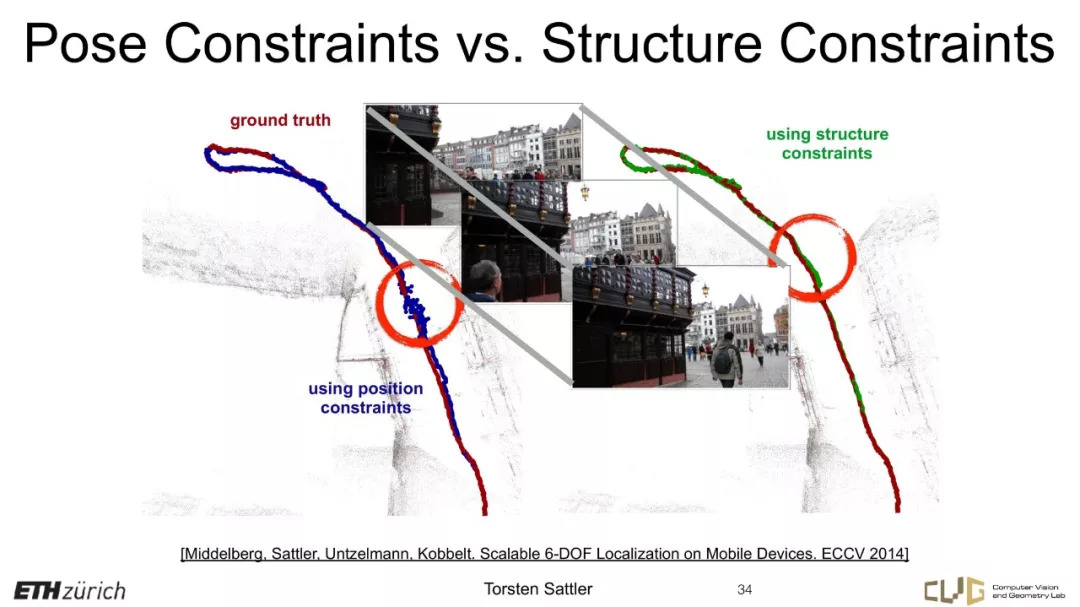
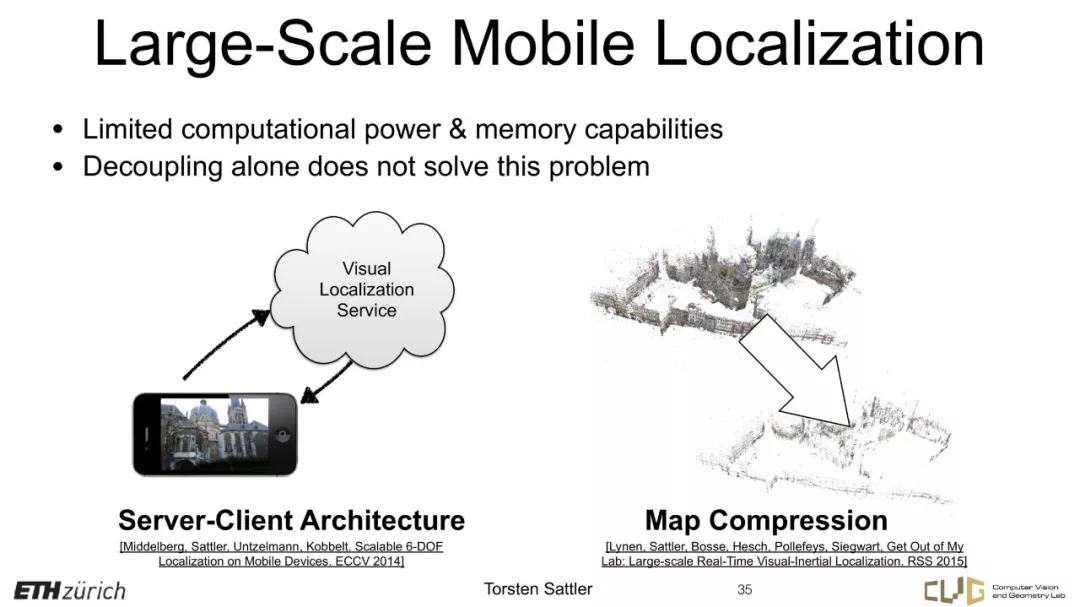
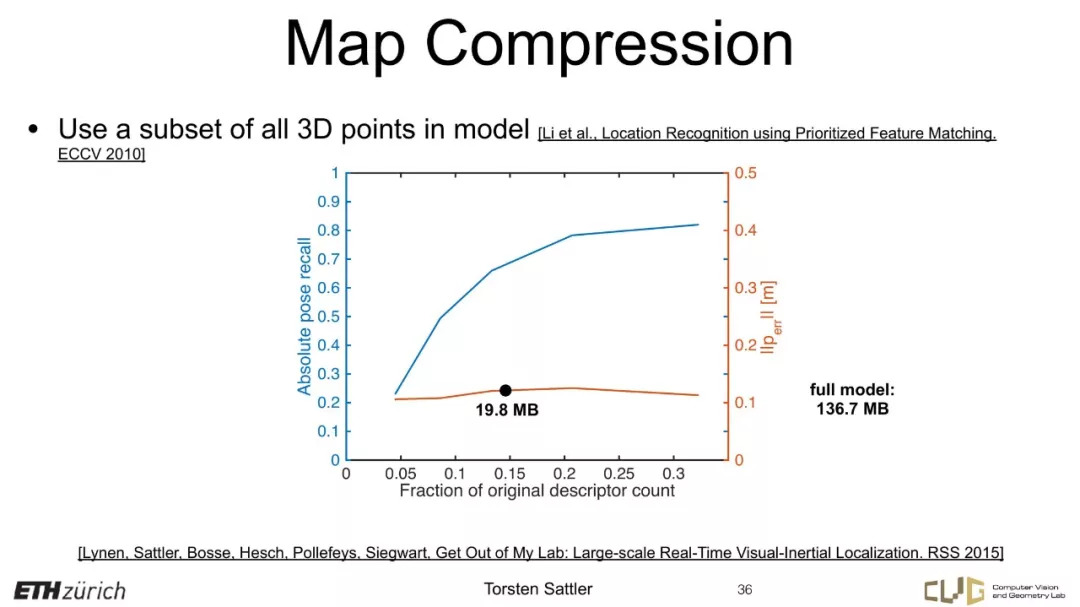
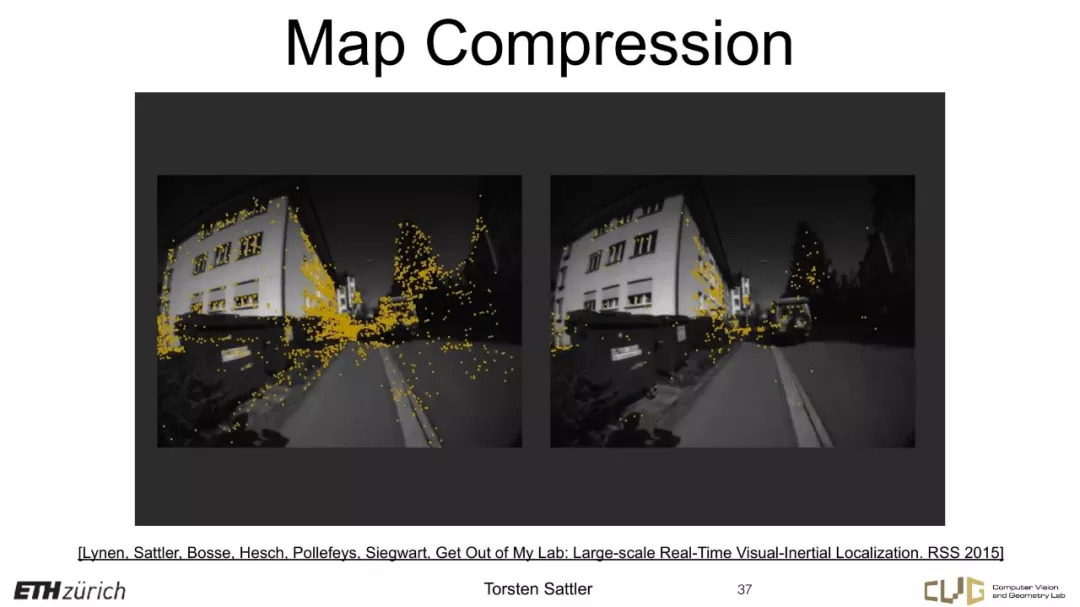
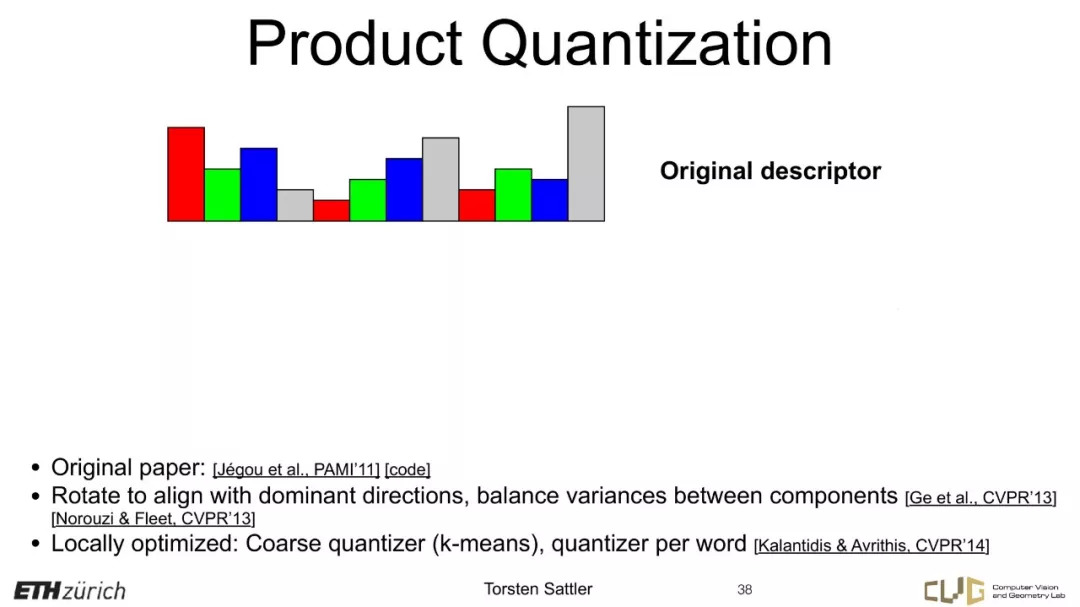
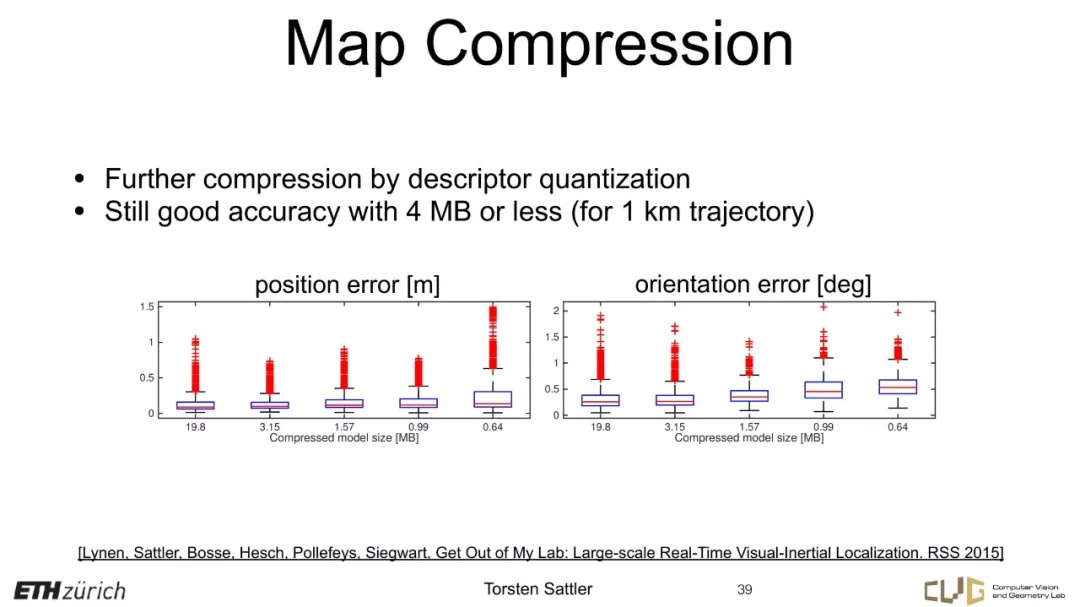
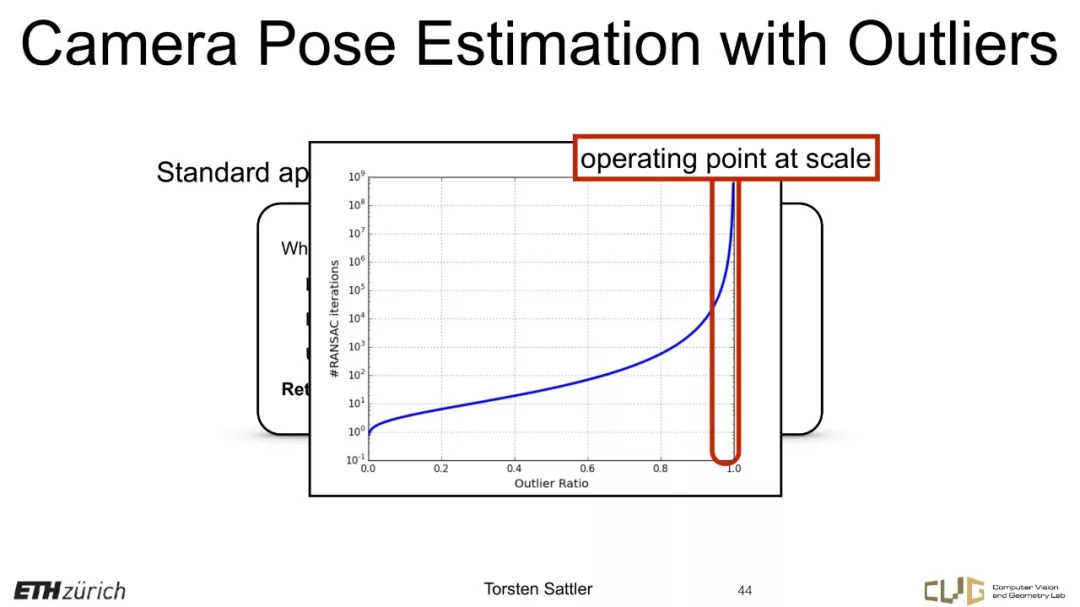
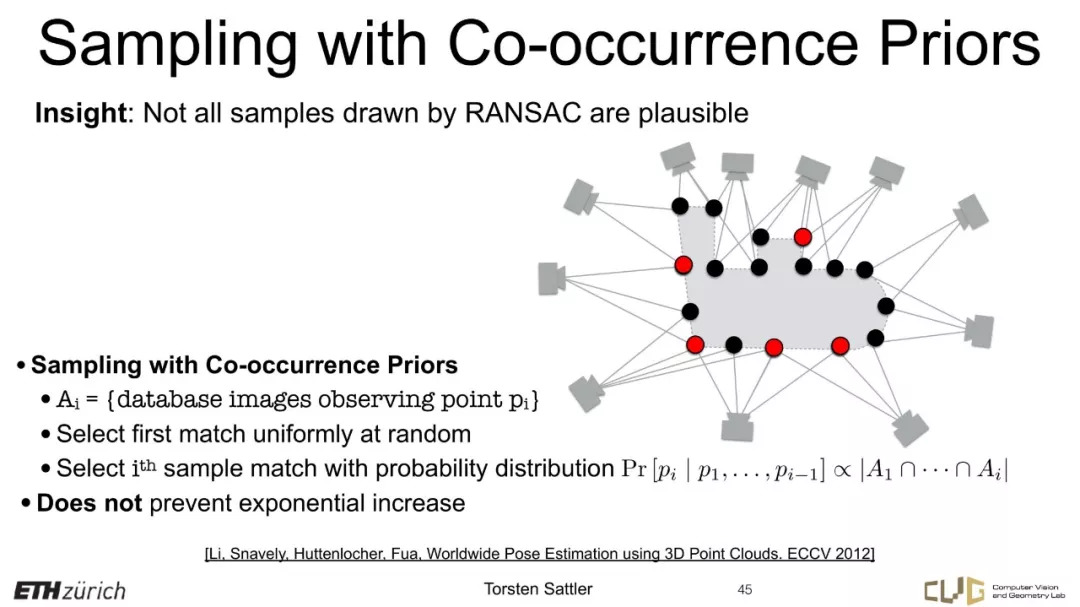
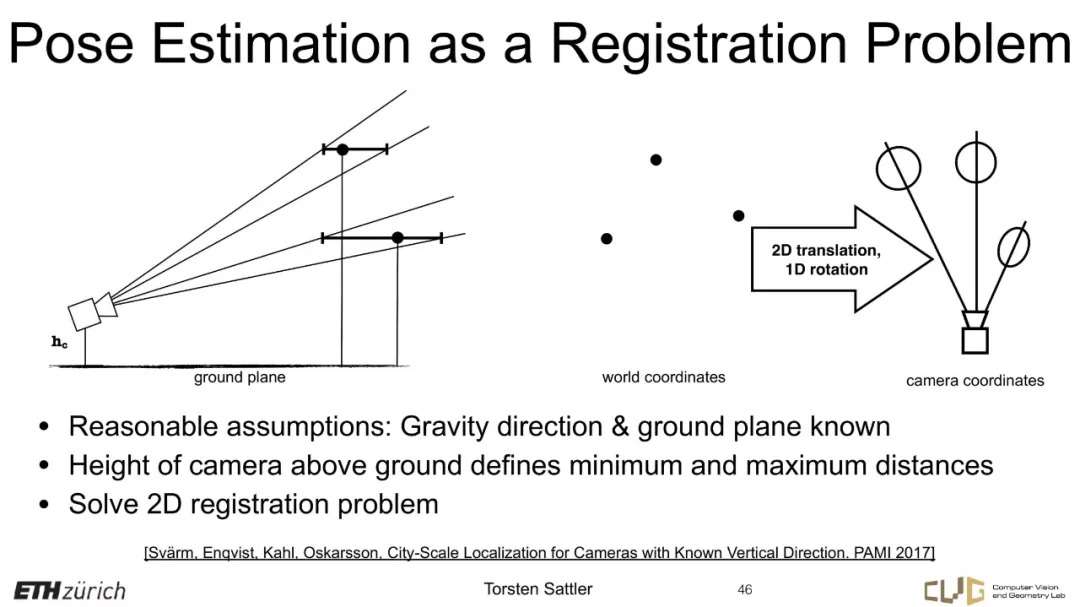
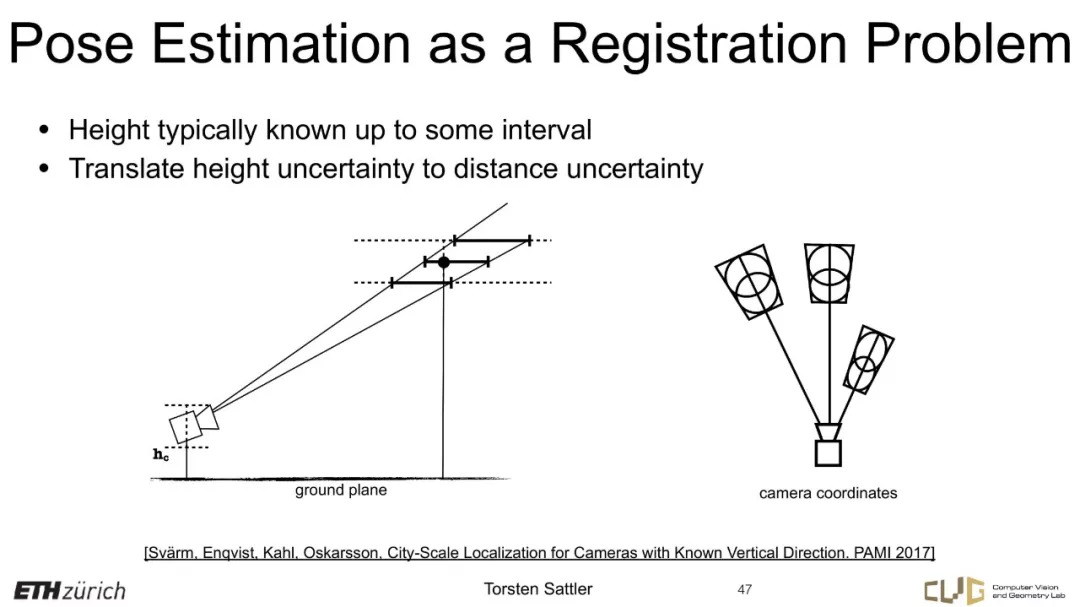
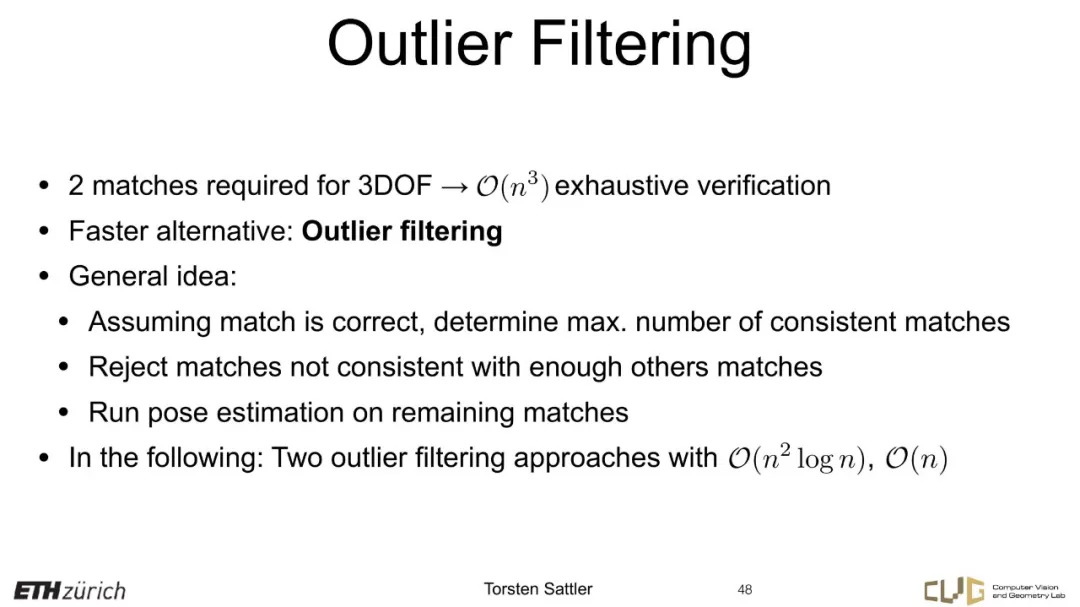
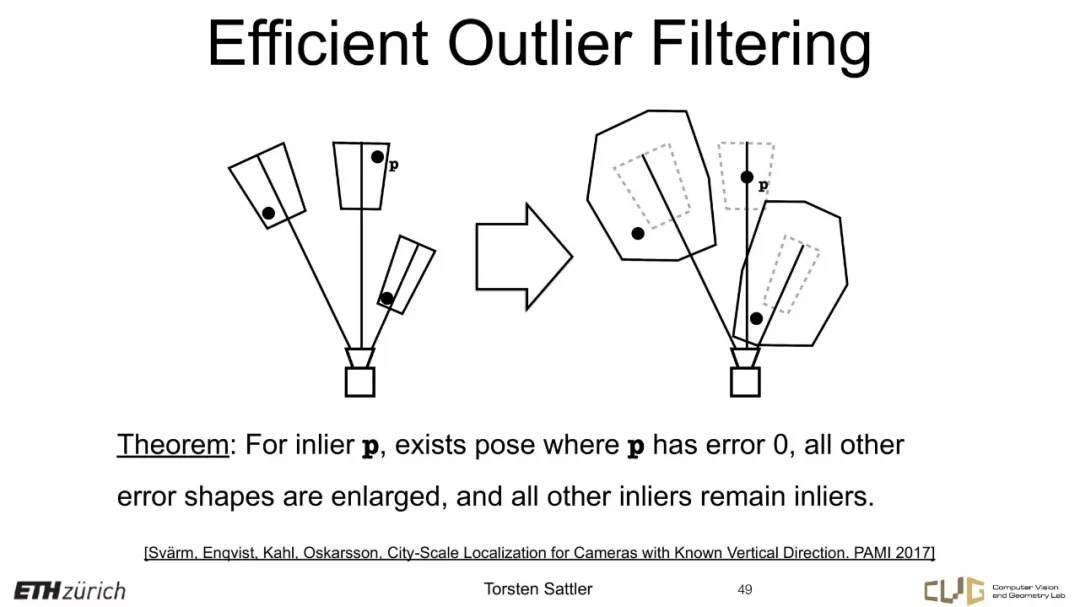
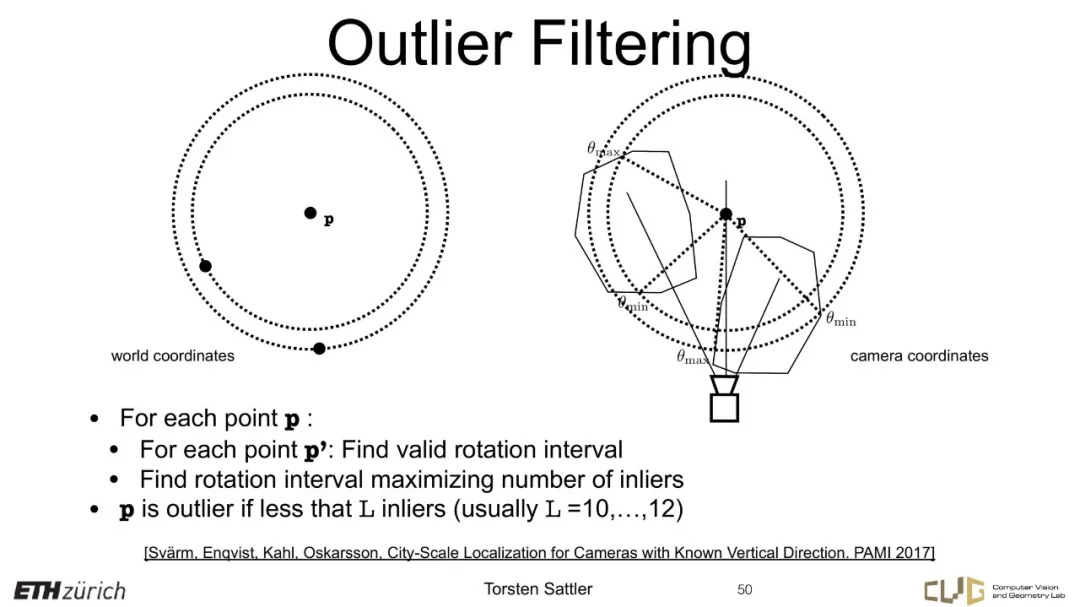
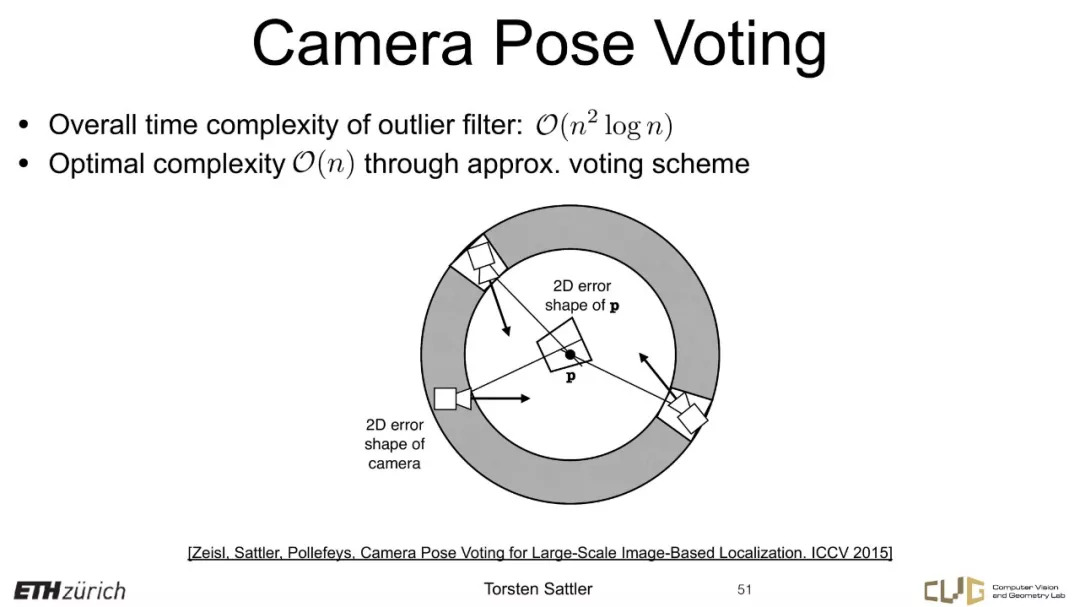
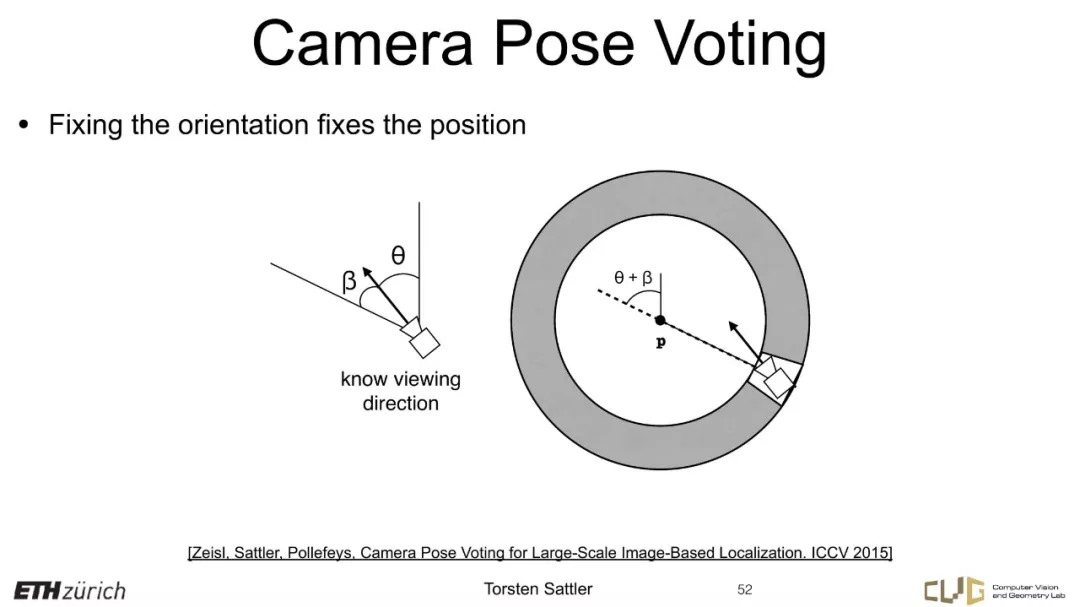
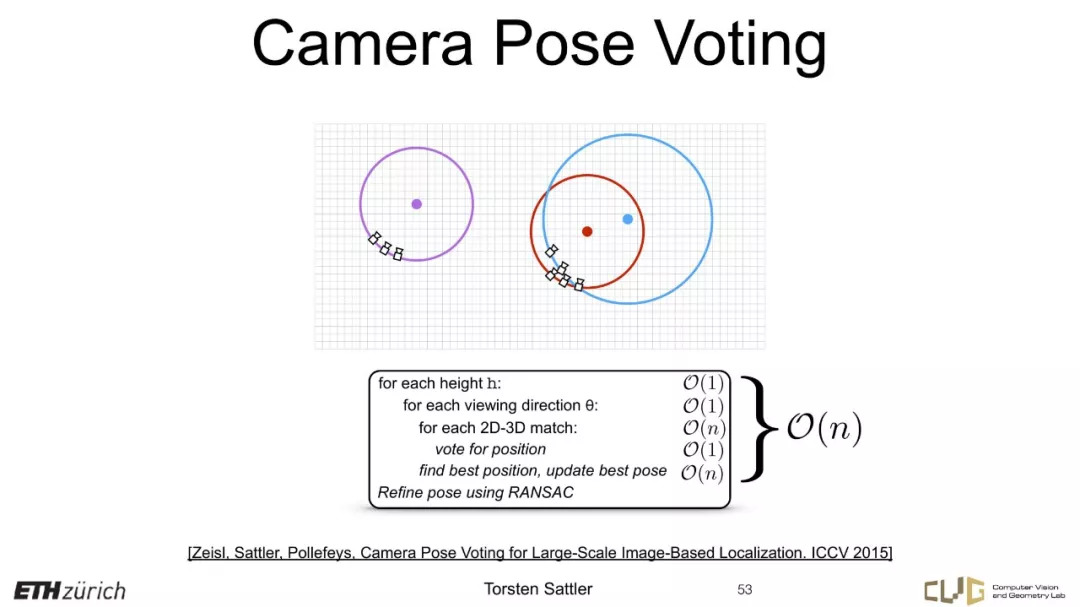
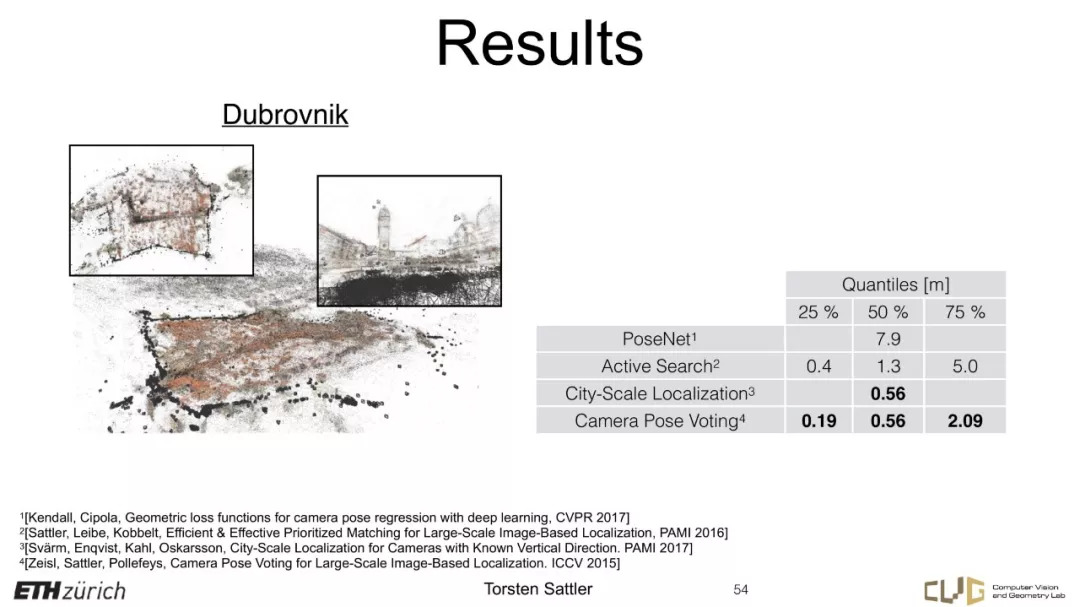
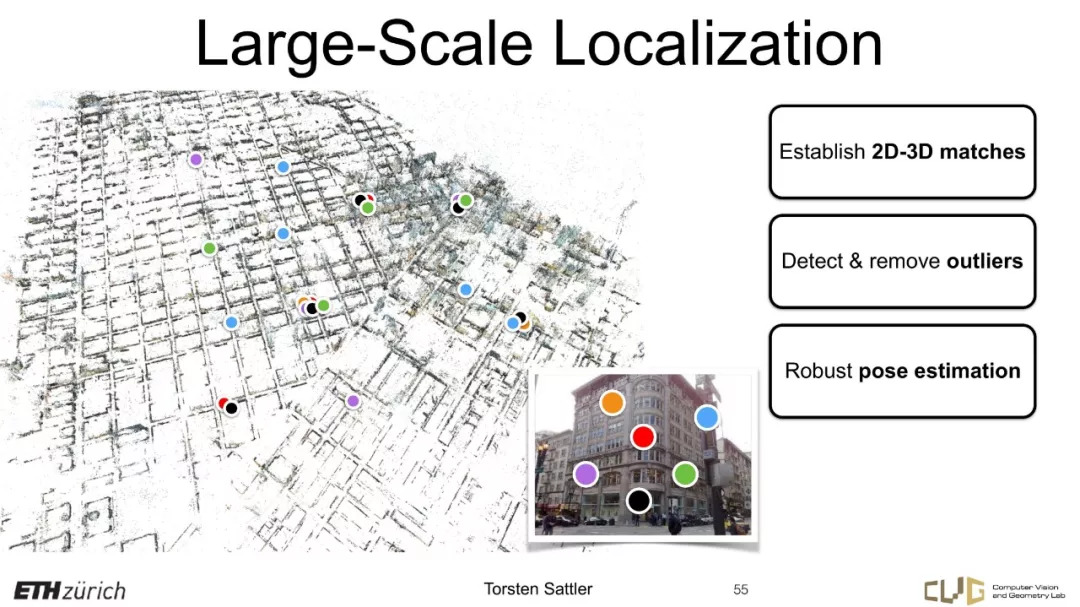
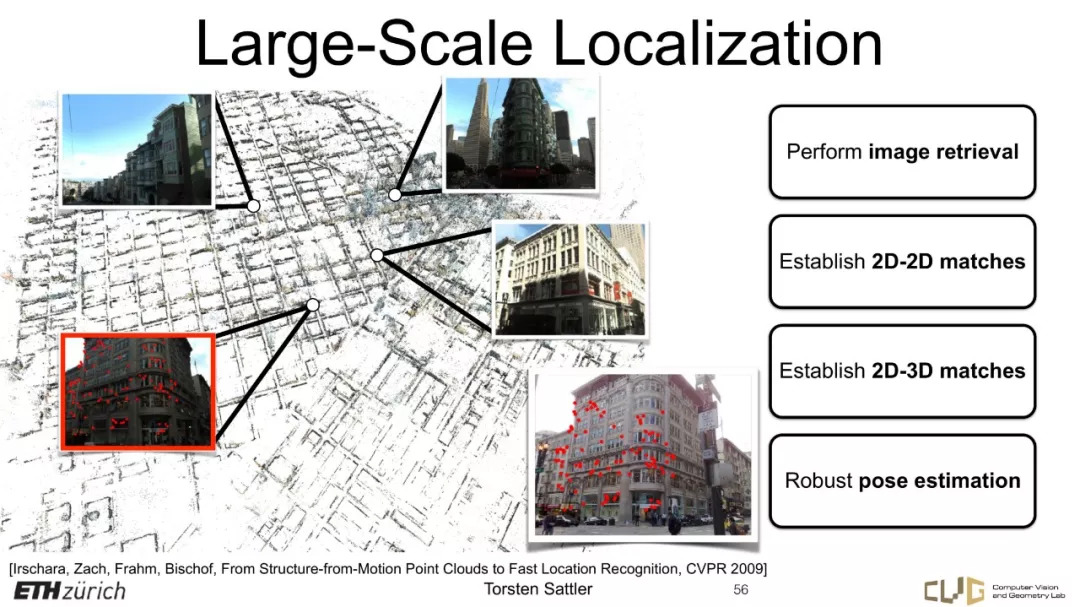
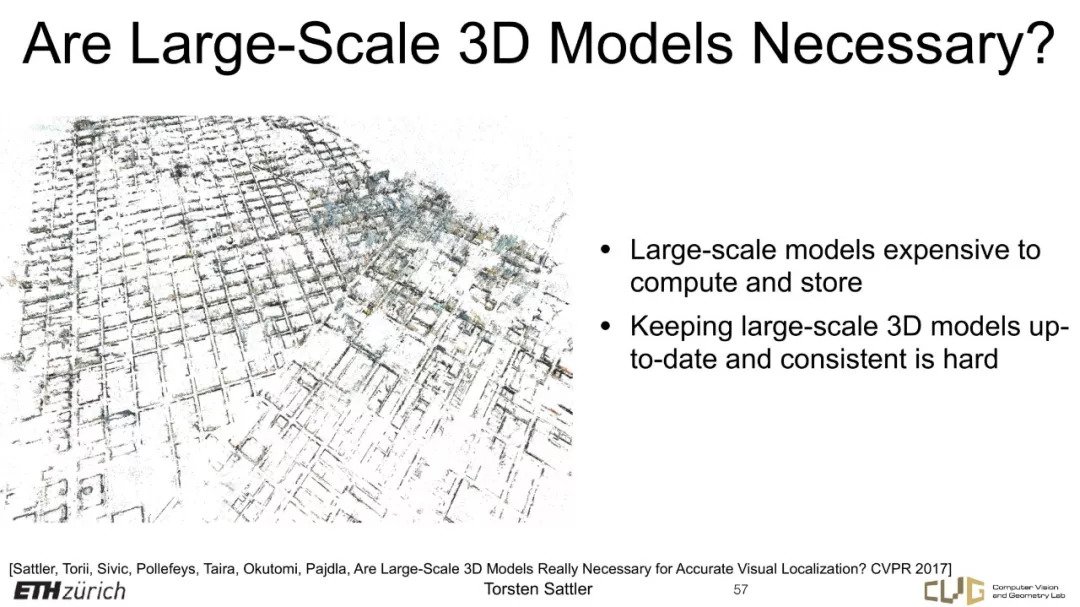
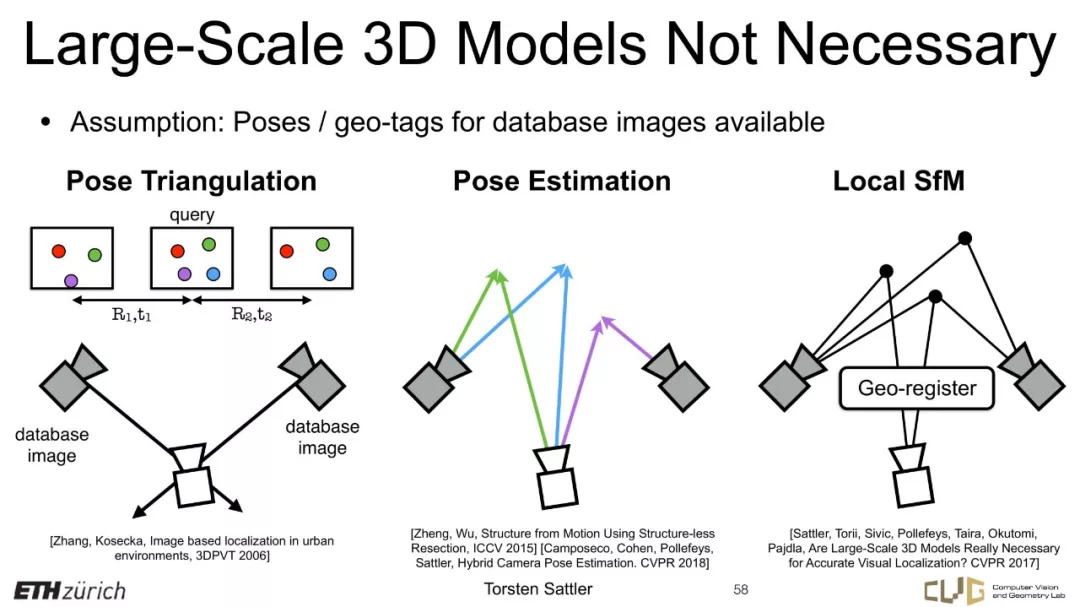
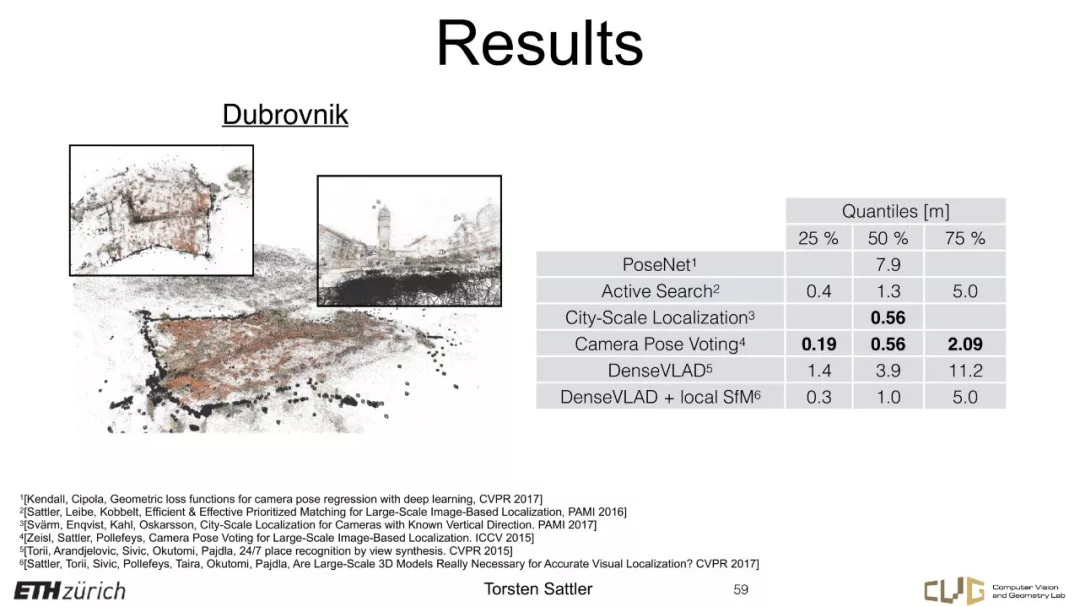
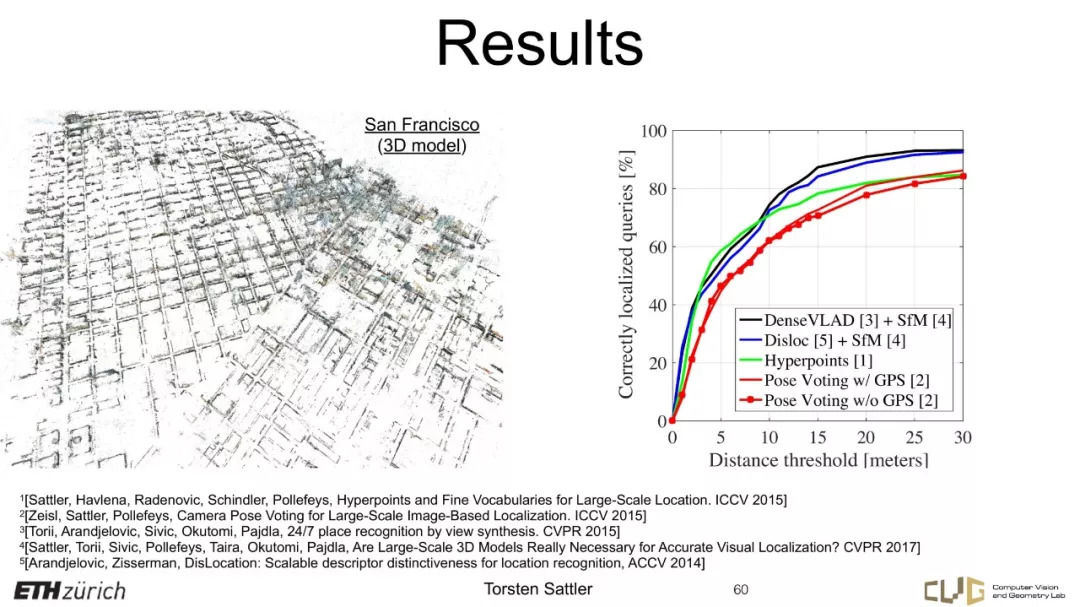
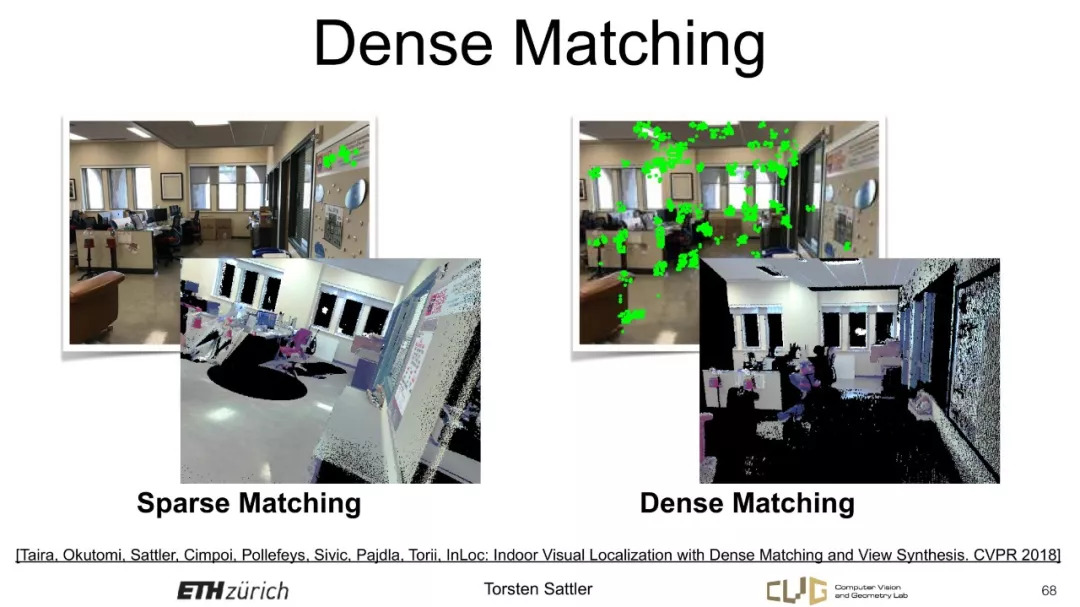
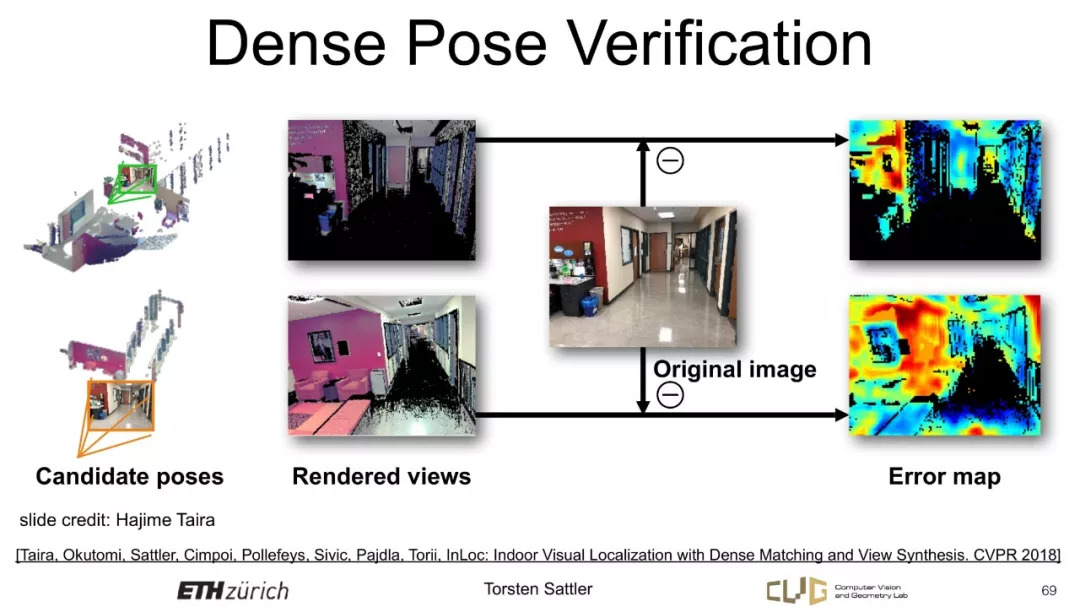
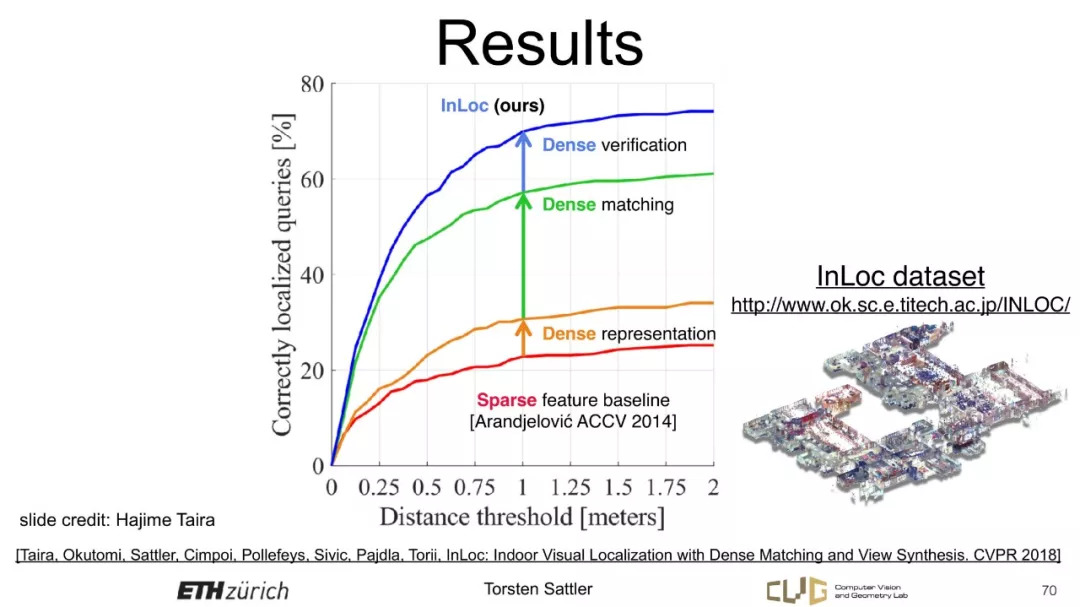
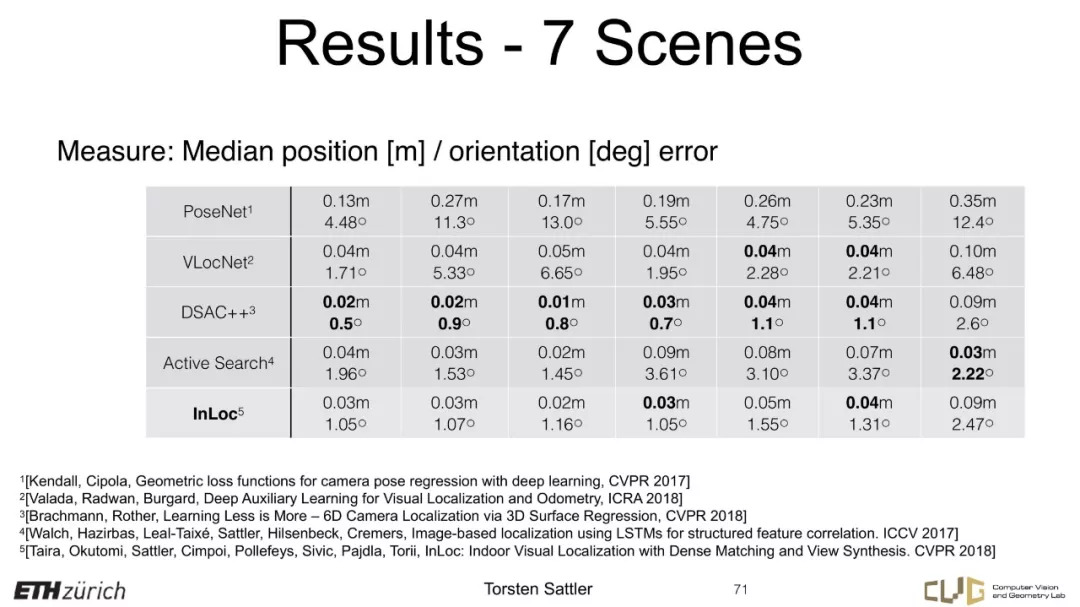
基于特征方法的研究现状:

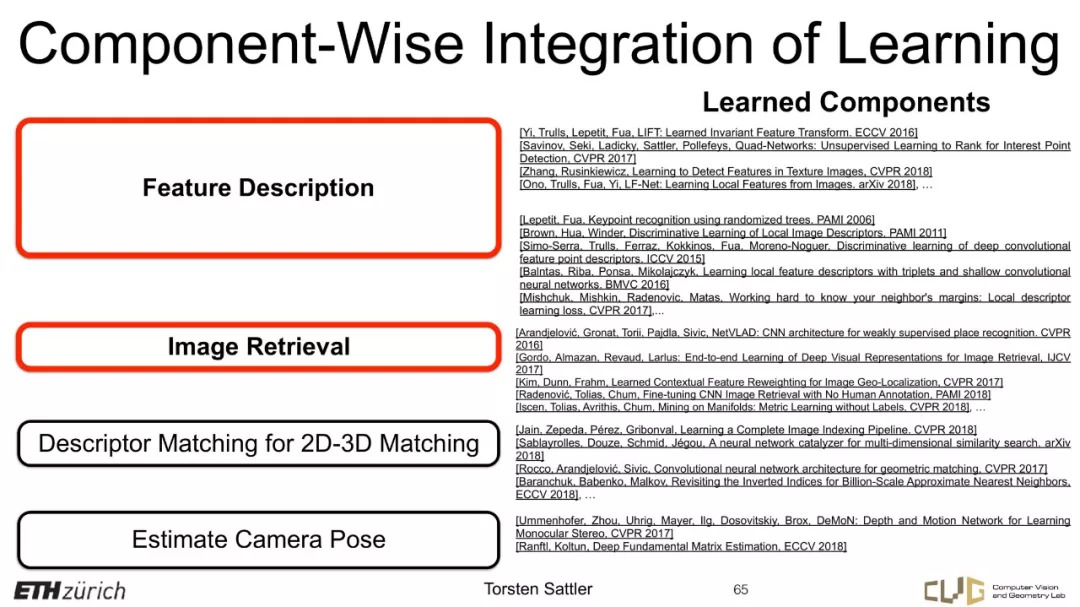
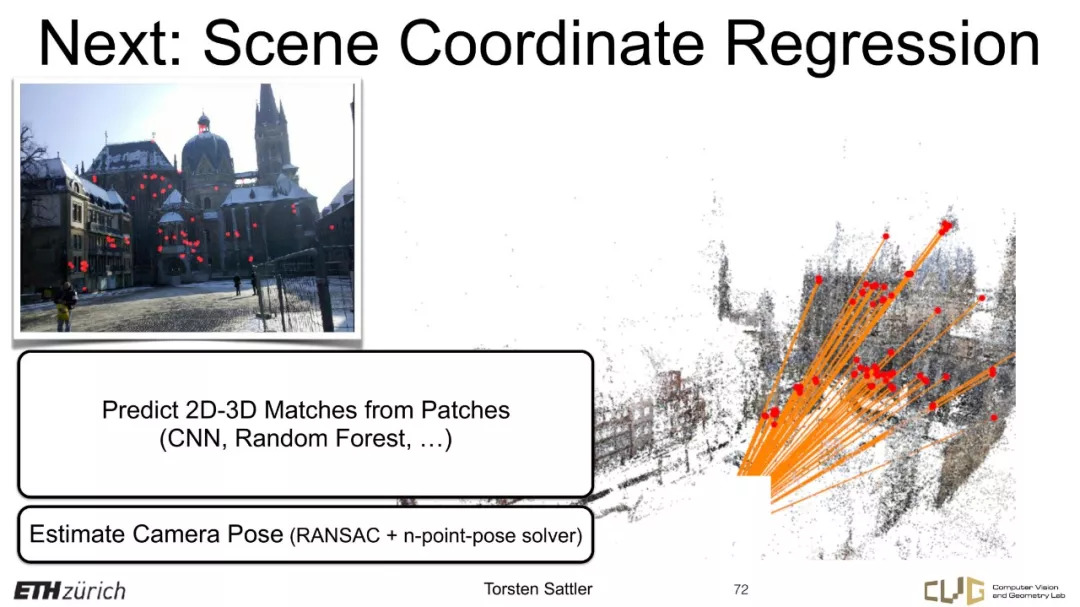
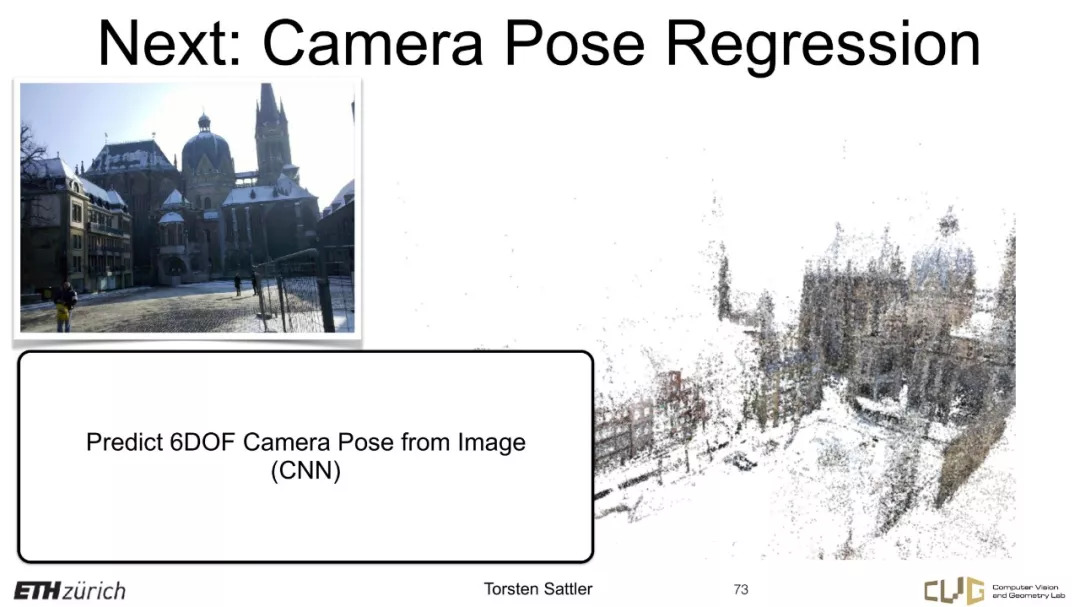
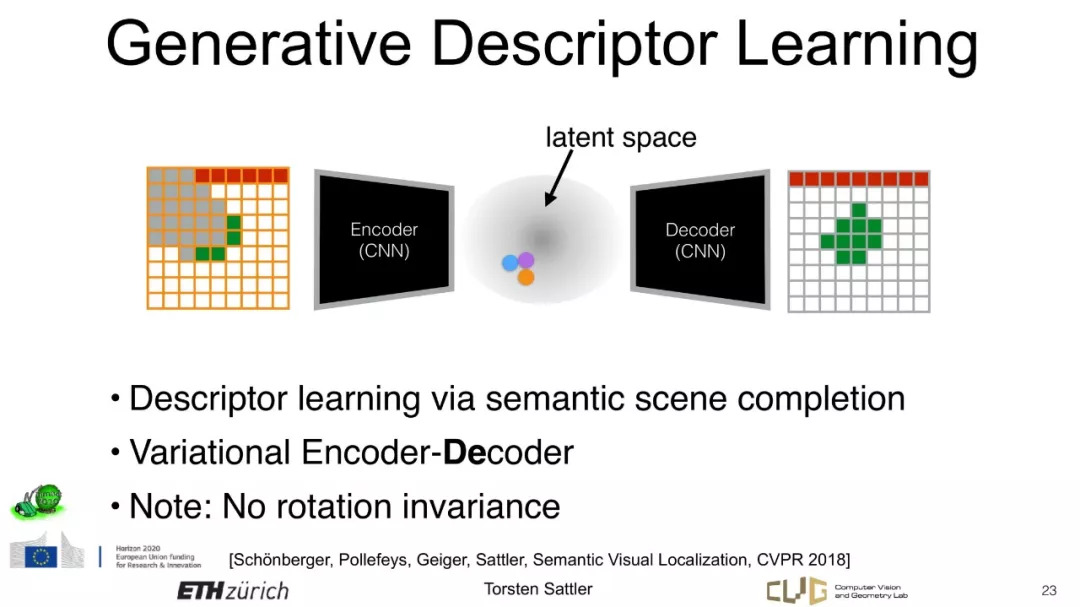
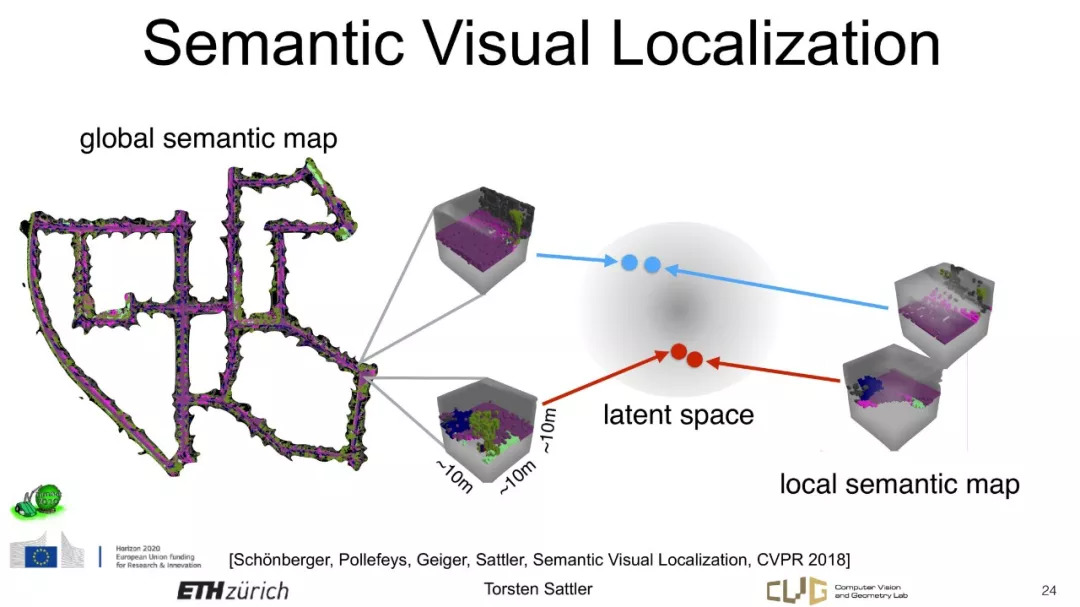
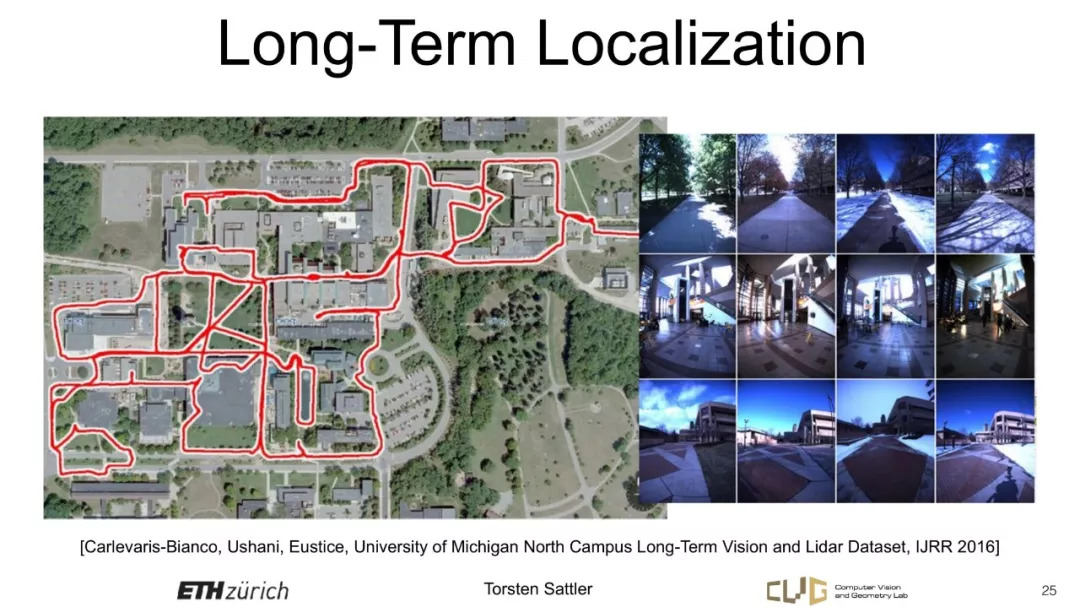
基于学习的定位方法:

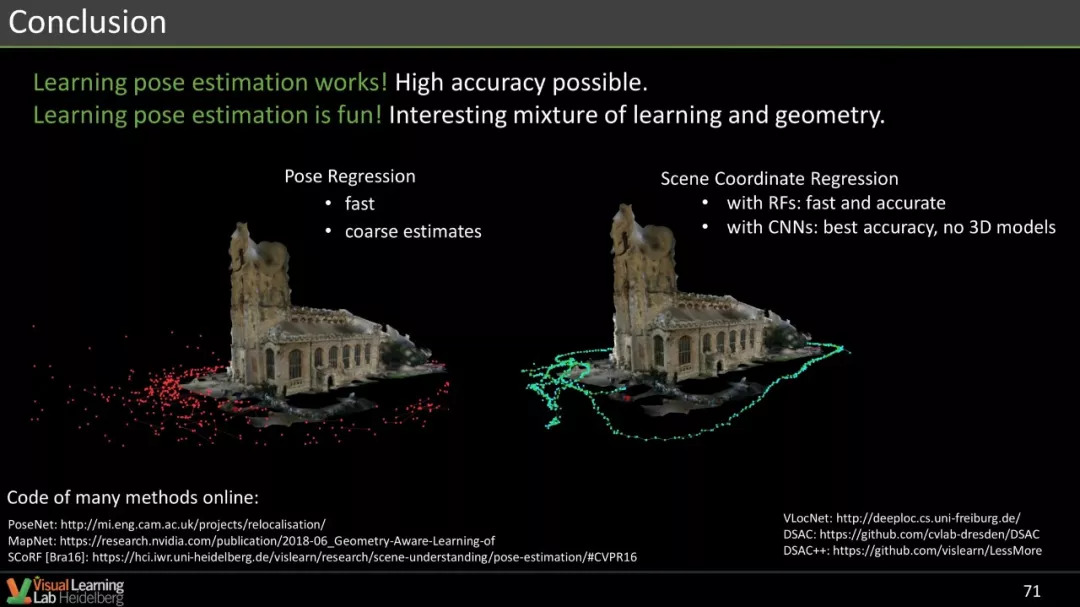
存在的问题及未来趋势:
-END-
专 · 知
人工智能领域26个主题知识资料全集获取与加入专知人工智能服务群: 欢迎微信扫一扫加入专知人工智能知识星球群,获取专业知识教程视频资料和与专家交流咨询!

请PC登录www.zhuanzhi.ai或者点击阅读原文,注册登录专知,获取更多AI知识资料!

请加专知小助手微信(扫一扫如下二维码添加),加入专知主题群(请备注主题类型:AI、NLP、CV、 KG等)交流~

AI 项目技术 & 商务合作:bd@zhuanzhi.ai, 或扫描上面二维码联系!
请关注专知公众号,获取人工智能的专业知识!
点击“阅读原文”,使用专知

