摘要—三维点云配准是计算机视觉、计算机图形学、机器人学、遥感等领域中的一个基础问题。在过去的三十年中,我们见证了这一领域的惊人进展,出现了许多不同的解决方案。尽管已有一些相关的综述文章,但它们的覆盖范围仍然有限。在本研究中,我们提供了一篇全面的三维点云配准综述,涵盖了一些子领域,如配对粗配准、配对精细配准、多视角配准、跨尺度配准和多实例配准。本文全面介绍了数据集、评估指标、方法分类、优缺点讨论以及对未来研究方向的深刻思考。该综述的项目页面可通过以下链接获取:
https://github.com/Amyyyy11/3D-Registration-in-30-Years-A-Survey。
关键词—三维点云、点云配准、综述、性能评估、数据集。
1 引言
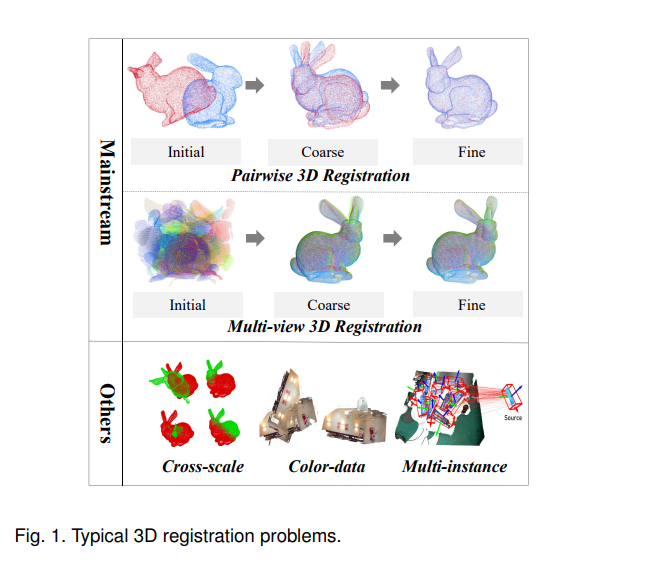
对三维点云进行统一坐标系配准(即三维点云配准)是计算机视觉、计算机图形学、机器人学、遥感等多个领域中的一个基础问题。配准后的点云可以带来两个关键结果:1)提供更完整的点云用于重建、信息融合和误差测量;2)为鲁棒的姿态估计、三维跟踪、物体/地点定位和运动流估计提供六自由度(6-DoF)姿态。随着三维主动和被动获取技术的发展(如英特尔的RealSense、苹果的iPhone系列),三维点云配准在过去三十年中引起了越来越多的研究关注。 特别地,针对鲁棒的三维点云配准,已经根据数据获取方式或应用场景的不同,衍生出多个子领域(见图1)。从处理的数据序列的角度看,配对配准主要关注对齐两组点云,而多视角配准则处理多个顺序或无序的点云。从误差最小化的角度看,粗配准大致对齐具有较大姿态变化的点云,而精细配准通常聚焦于最小化较小的残差误差。从方法学的角度看,早期的方法设计了手工优化或启发式方法,而近年来的方法则依赖于深度学习技术。还有一些其他的研究视角,如特征学习、对应学习和鲁棒的6-DoF姿态估计。因此,三维点云配准领域涉及了大量的方法和研究主题。 现有的综述通常聚焦于点云配准任务的不同部分或有限范围。例如,早期的综述[1]涵盖了点云配准的多个方面,但缺乏对各子领域之间内在关系的深入分析,未能系统地揭示它们之间的相互联系和互动。最近的综述[2]回顾了常用的数据集和评估指标,但缺乏在统一实验设置下的性能比较,未能展示不同方法在一致条件下的优缺点。因此,这些综述未能从更加全面的视角覆盖过去三十年的文献。 为填补这一空白,我们在本文中提供了对过去几十年三维配准方法的全面综述。主要贡献如下:
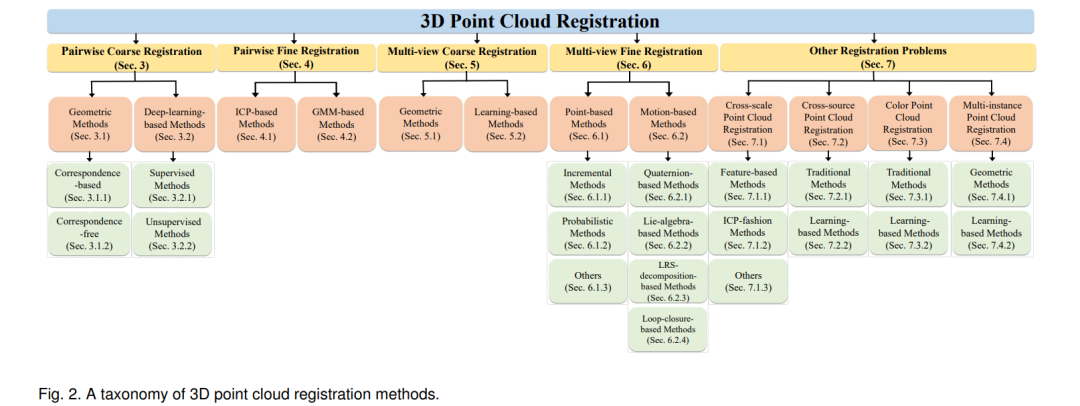
- 全面回顾与新分类法。据我们所知,如图2所示,这是第一篇全面回顾点云配准方法的综述论文,涵盖了配对粗配准、配对精细配准、多视角配准、跨尺度配准和多实例配准等子领域。本文提供了一个系统的分类法,并广泛覆盖了相关文献。
- 基准概述与性能比较。本文系统总结了三维点云配准的流行基准数据集和性能评估指标,并报告了代表性最前沿方法在标准基准上的一组比较结果。
- 对未来方向的展望。本文突出分析了现有方法的特点、优缺点,并就当前面临的挑战以及未来的研究方向进行了深入讨论,以期激发该领域后续的研究工作。
本文的其余部分安排如下:第二节回顾了点云配准的数据集和评估指标;第三节介绍了配对粗配准方法,包括基于对应和无对应的方法;第四节讨论了配对精细配准方法,重点介绍了基于ICP和GMM的方法;第五节介绍了多视角粗配准方法,包括几何方法和基于深度学习的方法;第六节介绍了多视角精细配准方法,包括基于点的和基于运动的方法;第七节介绍了其他配准问题,如跨尺度、跨源、彩色点云和多实例配准;第八节讨论了该领域的挑战与机会。最后,第九节总结了全文。