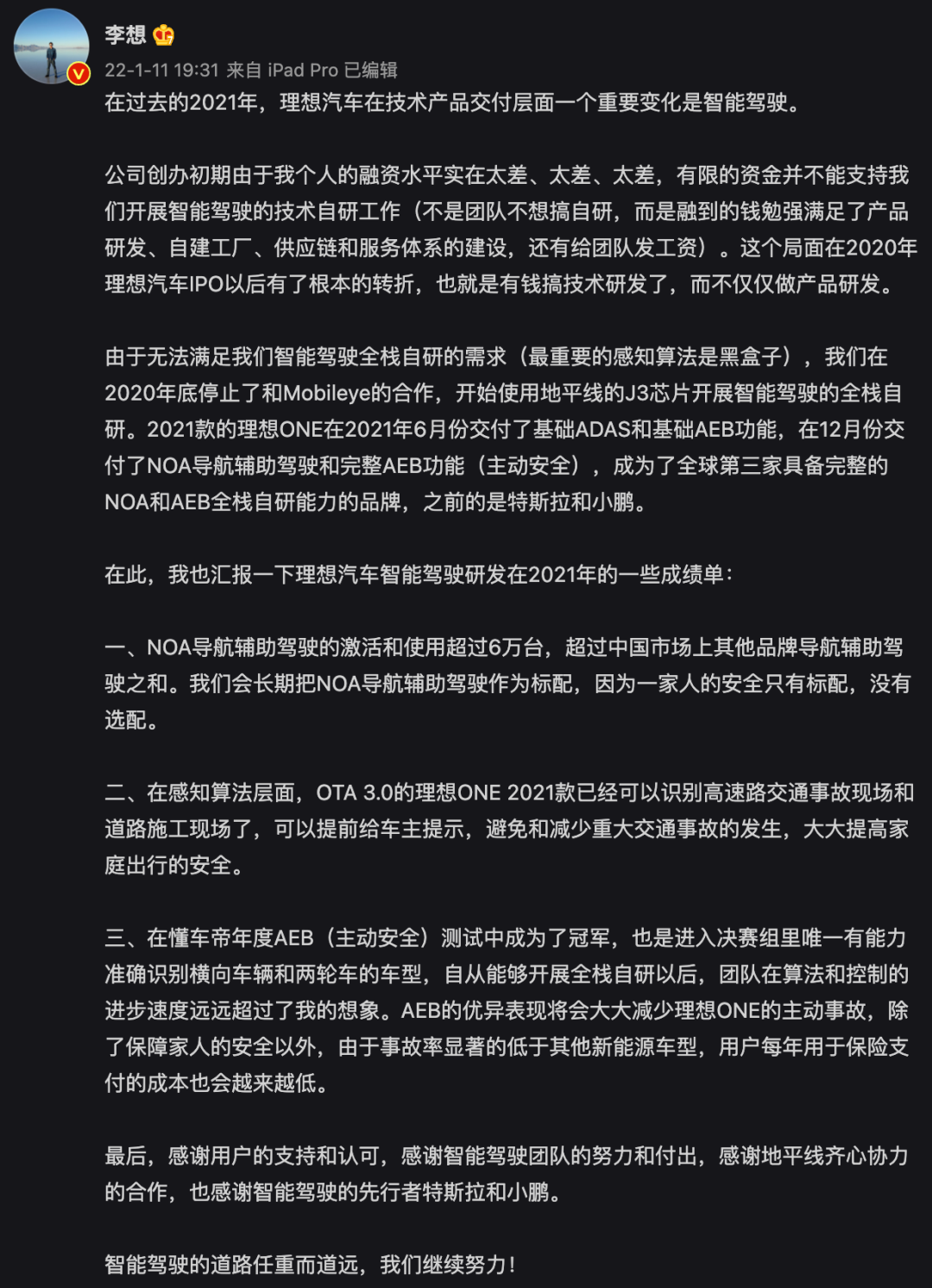
AEB测试「霸榜」!理想如何靠全栈自研逆袭成功?
![]()
新智元报道

新智元报道
新智元报道
编辑:桃子 好困
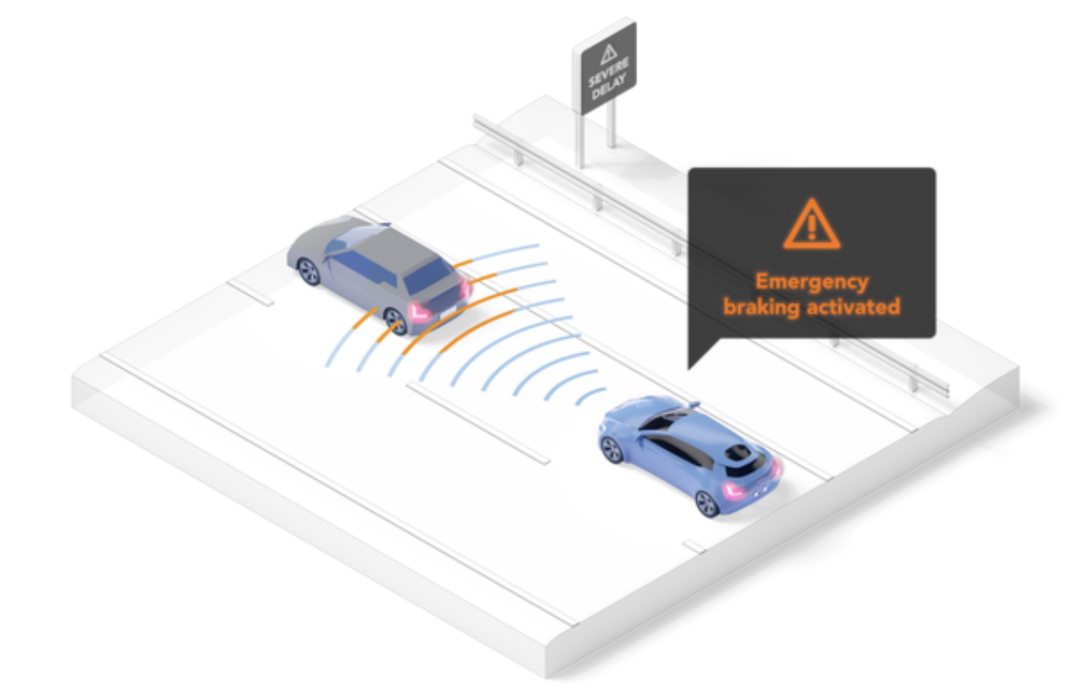
【新智元导读】一场测试,一百多辆车,理想ONE凭什么力压群雄拿下第一?







放下「黑盒」,走向「自研」

6万车主免费用的NOA

理想照进现实



登录查看更多
相关内容

Arxiv
0+阅读 · 2022年4月14日




相关VIP内容
相关资讯