俄美竞相开发革命性的新型水下导航系统 | DARPA研发水下导航系统
点击上方“公众号”可以订阅哦!
俄美竞相开发革命性的
新型水下导航系统
来源:大柳树防务(ID:dlswinds))
2016年,俄圣彼得堡海洋仪器康采恩完成新型水下导航定位系统的研制任务【1】。这种“定位”系统能在北极冰层以下工作,综合运用超短波通信和水声通信等方式,可与空中、水面和陆地的控制中心实时交换信息,并借助深海浮标,为无人潜航器提供米级以下的高精度导航定位服务。与此同时,美国国防部高级研究计划局也在进行相关工作。俄美新型水下导航系统未来一旦服役可在确保水下平台生存能力的同时,提升水下精确作战能力。这种系统虽然不是一种全新的系统,但它综合集成和改进了现有通信导航技术,在其运用上进行了创新,仍然将具有革命性意义。
一、发展动因
随着国外无人潜航器(UUV)的军事用途越来越广泛,隐蔽的导航一直是亟待解决的问题。目前,UUV为了保持隐身性,使用惯导系统,但惯导系统存在累积误差问题,需要外部校准;使用GPS信号虽然可校准UUV,但电磁信号在水中衰减严重,UUV需上浮至水面接收GPS信号,这又影响水下作战平台的生存能力。为此,俄美两国近年加速了相关研究,试图在确保生存的基础上,不断提升UUV的导航精度。
从美国来说,UUV正成为美军打破中国、俄罗斯等国的“反介入/区域”战略的重要抓手,发展生存性更高、导航更精确的UUV是一个迫切需求。2016年9月初,美国海军发布的新版《水下战科技目标》,与2013年9月发布的旧版文件相比,该新版文件新增两个重点关注领域,即水下机动作战和水下精确定位导航授时。对于后者,该文件指出,“对于执行水下任务的设备,能够精确定位自身是至关重要的,未来水下装备需要新的定位导航授时方法,在敌方拒止区域将定位导航授时误差降到最低”。
从俄罗斯来讲,俄罗斯开展水下定位导航研究比西方国家晚了15年,同美国每年投入700亿美元研发经费相比,俄罗斯目前已投入的研发经费还不到50亿美元。俄罗斯军科院教授瓦季姆·科久林表示,新型水下导航系统的研制将有助于俄罗斯在无人潜航器的控制方面“获得领先地位”,增加与美国进行战略对抗的实力。
二、发展概况
(一)俄罗斯
俄罗斯新型水下导航系统由“格洛纳斯”导航系统、声呐浮标、无人潜航器组成,将布设在俄罗斯北冰洋大陆架上。其中,声呐浮标由无线电水声仪和电源系统组成,无线电水声仪集成了超短波无线电台、“格洛纳斯”信号接收机、与“信使-D1M”卫星通信的系统,以及与无人潜航器通信的水下通信系统。无线电水声仪是一种高精度坐标定位仪,定位深度最深可达水下8千米,UUV接收声呐浮标的水声中继信息后可进行精确定位。声呐浮标有三种工作模式:一是接收和存储来自通信卫星的信息,并通过水声通信方式将信息中继给UUV;二是“对话”,岸上、空中和海上控制中心首先借助超短波通信与浮标交换信息,然后通过浮标的水声中继系统实现与UUV的实时通信,这种工作模式可用于了解UUV的位置和将要完成的任务,还能不间断地对UUV进行控制;三是UUV完全自主执行任务,只利用浮标提供的水声信息调整坐标和航向,紧急情况下,UUV还可以发出SOS信号,请求暂停深水任务。

俄罗斯计划以上述新型水下导航系统为基础,建立水下监控和服务于油气开采的全球信息网络中心系统。俄军事科学院教授瓦季姆·科久林透露,该系统将于2018年试运行。

(二)美国
2016年3月和5月,美国防部国防高级研究计划局(DARPA)先后授予德雷珀实验室、BAE系统公司各一份合同,分别为“深海定位导航系统”(POSYDON)项目开发水下导航方案【2】【3】。德雷珀实验室防御系统主任尼尔·亚当斯称,“深海定位导航系统”项目旨在变革水下导航方式,将信标作为水下GPS用于无人潜航器(UUV)导航。
德雷珀实验室的方案是在海底盆地将信标组建成“星座”,使用声波发送精确定位信号,使UUV获得精确的位置信息,而且少量信标就能覆盖全球。德雷珀实验室计划在2017年1月对信标GPS系统的高精度模型进行海试,在2018年对原型样机进行海试。BAE系统公司将采用类似方案,使UUV能在水下通过多个分布式的远距离声源而实现定位导航。BAE系统公司表示,将依托其先进的信号处理技术、声通信技术、抗干扰技术、防欺骗技术来开发POSYDON系统。根据2016年9月初发布的美国海军新版《水下战科技目标》【4】,美海军水下精确定位导航授时的目标是:促进相关技术成熟,使水下装备在不断变化的作战环境中持续可靠的获得高精度的定位导航授时信息,促进新技术的发展成熟,降低对传感器的依赖程度。

三、影响分析
俄美开发新型水下导航系统主要有以下影响:一是有利于增加水下作战空间的透明性。相比陆地、空中和水面作战空间而言,目前水下作战空间的透明性相对较差,具有较大的不确定性。作为一种集成式创新性装备,新型水下导航系统未来可与其他水下感知系统一起构建一种水下分布式感知和导航网络,将为俄美两国UUV看得更远、更清。
二是有利于提升水下作战力量的生存能力。新型水下导航系统使俄美两国的UUV不仅能看得更远、更清,而且可继续使未装备此类水下导航系统的敌方处于不透明的水下作战状态,有利于己方安全。同时,两国潜艇力量通过施放UUV进行C4ISR行动和攻防作战行动,拓展了自身的作战范围,也可确保己方的隐身性和安全性。
三是有利于提升分布式精确打击和二次核打击能力。俄美两国的弹道导弹核潜艇、攻击型核潜艇或巡航导弹核潜艇均可携载大量的UUV,每艘潜艇及其UUV可构成一个小型分布式打击网络,而多个小型分布式打击网络则可构成一个大型分布式打击网络。以包括新型水下导航系统在内的水下信息网络为纽带,在水面、空中、空间以及陆上力量的配合下,两国以潜艇及其UUV为核心的水下力量既可对敌发动分布式常规精确打击,也可对敌实施分布式二次核威慑与打击行动。其作战效能将大大超过现有非分布式的作战模式。

DARPA研发类似于
GPS的水下导航系统
来源:www.scout.com,By Kris Osborn
编译:远望智库 谌为
五角大楼和BAE公司正在合作开发下一代水下导航技术,用来确定矿山,发现敌方潜艇和监视作战目标。
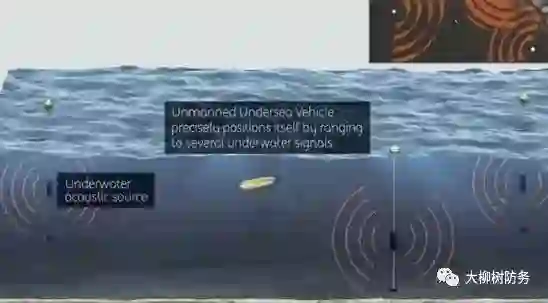
“深海定位导航系统”(POSYDON),综合运用水下声波信号、水面浮标、水下信标或节点、GPS信号,能够快速的确定水下执行任务的无人系统的位置坐标,并将数据传输回水面舰艇或潜艇的指挥控制系统。
POSYDON目前正在进行第一阶段的研发工作,由美国高级研究计划局(DARPA)和BAE等公司合作完成。
DARPA的研发者称,POSYDON能够在大洋中提供实时、连续和稳定的定位信息。通过布放少量的可远距离传播的声源系统,水下平台不再需要定期上浮接收GPS信号即可获得连续、高精度的导航信息。
虽然专家说有些非常低频的无线电能在海面下传输某种信号,但潜艇需要浮出水面获取强的无线电频率或GPS信号,以获得现场数据和通讯。
DARPA战略技术办公室项目经理Lin Haas在最新发布的播客中说,你能在非常浅的深度接收GPS,但这不是我们的相关操作。POSYDON为水下使用者带来了‘类GPS’的能力。”
军事学家和技术开发人员把在“GPS失效”的环境中导航的努力称作是一种获得“精确,导航和时机”的方式。
Haas解释道,尽管如此,类似于GPS在地表的运作的海底无缝导航仍然具有巨大的科学挑战。

GPS信号同算法一起工作,这些算法能够通过光速和光的传播时间计算一个物体的距离。如果光传播的距离是确定的,连同信号的传播速度,算法可以很快地确定精确距离,从而识别一个物体。
例如,雷达系统的电磁信号,或者武器的激光测距仪所发出的激光,可以使用光速和其传播时间来快速地确定物体的方位,形状或者速度。
Haas解释道,但是在海面下使用声频信号来确定距离要复杂得多。
Haas说,“对于GPS而言光速是常数。但水底的声速并不是这样的。水底信号的传播速度同很多因素相关,其中起主要作用的是水底温度和海水盐度。我们已经开发出适用于所有这些水下声学信号的模型。水下信号并不仅仅以直线传播。”
因此,在发射器和接收器间的声频信号并不是线性传播。
Haas补充道,“声频信号会有多种传播路径;信号在不同的温度和压强区域间发生折射。算法可以改善现有模型和开发新模型。”
因此,水下无人机能使用声波来传播实时信息回潜艇。
DARPA办公室说,BAE,雷声BBN和DARPA实验室都在开展POSYDON的工作。
BAE海军系统和技术主管Geoff Edelson说,“GPS信号在海面反射并且不能穿透海水。POSYDON的重要性在于确保这些UUV(无人的水下传播媒介)能真正专注于他们的任务而不用周期性地浮出水面让GPS计算出它们确切在哪儿。”
Edelson解释道,这种技术依赖于一种“三角测量”。卫星发出的GPS信号被发送到一个表面节点,表面节点然后使用声波连接和定位海底无人机。
Edelson说道,“许多信号不会在海底传播。光不能传播得很远,而射频信号并不真正在海底传播。通过使用POSYDON,GPS信号被低频声波信号取代。”
POSYDON计划分三个阶段实现,目前正在第一阶段向前推进;据DARPA描述,第一阶段涉及模拟信号传播渠道,第二阶段打算开发一个单独波形,而第三阶段的目的是建立一个完整的原型定位系统。

Edelson说道,“现在我们正在分析数据,以确保这个概念是有价值的。我们打算‘点对点’从源到一个或两个接收器来传播。”
这种技术虽然在近几年可能仍离实际操作使用较远,但它的出现完全符合美国海军水下无人机的策略。海底无人机正变得越来越关键,用于抗击新兴的高科技水面和水下威胁,例如潜在对手正在开发的静音器,更先进的潜艇技术和武器。
UUV能够更好地传播信息回主机平台,并迅速提供位置数据,可以自然地协助定位敌方目标,海底矿山和其他同海军任务具有至关重要相关性的目标。
POSYDON技术,一旦可以实际操作,可以同现有工作平台如波滑翔机一起工作,旨在收集目标和威胁信息,以及海洋水文信息。
例如,被称为Seaglider的一种当前水下无人机使用浮力和翅膀实现向前运动,而不是一个电动螺旋桨。很长一段时间它能够收集海洋数据,如水体温度或盐度,收集数据,然后将它寄回。
新兴的POSYDON技术也对维吉尼亚级攻击潜艇和哥伦比亚级弹道导弹潜艇有很大帮助,建立导航参数,进行目标识别,甚至在更大的距离上精确定位威胁来源。
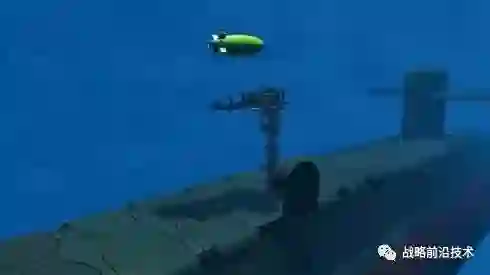
事实上,海军现在正在试验一种海底无人机,它能够从潜艇导弹管发射和返回,提高任务效率和加快启动和恢复操作。因此,能够准确地在一个特定区域操作识别UUV的位置将是很有价值的。
考虑到大部分的技术依赖于快速发展的算法,人工智能(AI)领域的快速发展是很重要的。
这种趋势最终将可能导致更多的人工智能的使用,在将数据提供给人类的指挥官之前,利用更加独立、电脑驱动的无人系统收集、组织和整合大量不同的信息和传感器数据。

高级海军官员解释道,水下无人机群很快就会同时使用声纳和不同的传感器来识别和摧毁敌人的潜艇和水面舰艇,寻找矿山,收集海洋数据和执行侦察任务,这些同时只由一个人在一艘海军舰艇或潜艇上来发出命令和控制操作。
在距离远远超出了正常的检测范围情况下,可能几个潜射水下机器人或远程无人水下交通工具就能够识别有威胁的敌方潜艇或表面舰船。
这个想法是为了利用计算机处理速度的增加和自主车载软件的快速发展。这将允许无人系统以更高的自主权快速操作,作为一个集成网络的一部分协作并行,并更快地执行更广泛的操作而不需要每一个单独的任务都由人类来控制。这项策略也旨在使潜艇、水面舰艇和一些地面操作利用这些快速发展的计算机技术。
也许一些小型无人机可以发出声平,然后分析返回信号以确定有威胁的敌方目标的位置,为潜艇提供必要的数据来以一个安全的距离发射重量级精确制导鱼雷摧毁敌方威胁。
海军高级官员解释道,集成无人机群可以立即将相关数据传送到水下或舰载计算系统和传感器。因此,人类的指挥官可以更快速和高效地访问相关信息,并拥有一个更大的窗口来做出重要决策。

注:投稿请电邮至124239956@qq.com ,合作 或 加入未来产业促进会请加:www13923462501 微信号或者扫描下面二维码:

文章版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将删除内容或协商版权问题!联系QQ:124239956



