einsum,一个函数走天下

简单的说,应用 einsum 就是省去求和式中的求和符号,例如下面的公式:
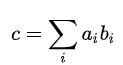
以 einsum 的写法就是:

后者将 
上面两个栗子换成 einsum 的写法就变成:
在实现一些算法时,数学表达式已经求出来了,需要将之转换为代码实现,简单的一些还好,有时碰到例如矩阵转置、矩阵乘法、求迹、张量乘法、数组求和等等,若是以分别以 transopse、sum、trace、tensordot 等函数实现的话,不但复杂,还容易出错。
现在,这些问题你统统可以一个函数搞定,没错,就是 einsum,einsum 函数就是根据上面的标记法实现的一种函数,可以根据给定的表达式进行运算,可以替代但不限于以下函数:
矩阵求迹:trace
求矩阵对角线:diag
张量(沿轴)求和:sum
张量转置:transopose
矩阵乘法:dot
张量乘法:tensordot
向量内积:inner
外积:outer
该函数在 numpy、tensorflow、pytorch 上都有实现,用法基本一样,定义如下:
einsum(equation, *operands)
equation 是字符串的表达式,operands 是操作数,是一个元组参数,并不是只能有两个,所以只要是能够通过 einsum 标记法表示的乘法求和公式,都可以用一个 einsum 解决,下面以 numpy 举几个栗子:
# 沿轴计算张量元素之和:c = a.sum(axis=0)
上面的以 sum 函数的实现代码,设 
换成 einsum 标记法:
然后根据此式使用 einsum 函数实现等价功能:
c = np.einsum('ijk->jk', a)# 作用与 c = a.sum(axis=0) 一样
更进一步的,如果 
c = np.einsum('i...->...', a)
这种写法 pytorch 与 tensorflow 同样支持,如果不是很理解的话,可以查看其对应的公式:
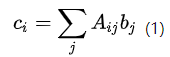
# 矩阵乘法c = np.dot(a, b)
矩阵乘法的公式为:
然后是 einsum 对应的实现:
c = np.einsum('ij,jk->ik', a, b)
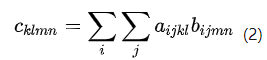
最后再举一个张量乘法栗子:
# 张量乘法c = np.tensordot(a, b, ([0, 1], [0, 1]))
如果 
对应的 einsum 实现:
c = np.einsum('ijk,ijl->kl', a, b)
下面以 numpy 做一下测试,对比 einsum 与各种函数的速度,这里使用 python 内建的 timeit 模块进行时间测试,先测试(四维)两张量相乘然后求所有元素之和,对应的公式为:
然后是测试代码:
from timeit import Timerimport numpy as np# 定义两个全局变量a = np.random.rand(64, 128, 128, 64)b = np.random.rand(64, 128, 128, 64)# 定义使用einsum与sum的函数def einsum():temp = np.einsum('ijkl,ijkl->', a, b)def npsum():temp = (a * b).sum()# 打印运行时间print("einsum cost:", Timer("einsum()", "from __main__ import einsum").timeit(20))print("npsum cost:", Timer("npsum()", "from __main__ import npsum").timeit(20))
上面 Timer 是 timeit 模块内的一个类
Timer(stmt, setup).timeit(number)# stmt: 要测试的语句# setup: 传入stmt的运行环境,比如stmt中要导入的模块等。# 可以写一行语句,也可以写多行语句,写多行语句时要用分号;隔开语句# number: 执行次数
将两个函数各执行 20 遍,最后的结果为,单位为秒:
einsum cost: 1.5560735npsum cost: 8.0874927
可以看到,einsum 比 sum 快了几乎一个量级,接下来测试单个张量求和:
将上面的代码改一下:
def einsum():temp = np.einsum('ijkl->', a)def npsum():temp = a.sum()
相应的运行时间为:
einsum cost: 3.2716003npsum cost: 6.7865246
还是 einsum 更快,所以哪怕是单个张量求和,numpy 上也可以用 einsum 替代,同样,求均值(mean)、方差(var)、标准差(std)也是一样。
接下来测试 einsum 与 dot 函数,首先列一下矩阵乘法的公式以以及 einsum表达式:

然后是测试代码:
a = np.random.rand(2024, 2024)b = np.random.rand(2024, 2024)# einsum与dot比较def einsum():res = np.einsum('ik,kj->ij', a, b)def dot():res = np.dot(a, b)print("einsum cost:", Timer("einsum()", "from __main__ import einsum").timeit(20))print("dot cost:", Timer("dot()", "from __main__ import dot").timeit(20))# einsum cost: 80.2403851# dot cost: 2.0842243
这就很尴尬了,比 dot 慢了 40 倍(并且差距随着矩阵规模的平方增加),这还怎么打天下?不过在 numpy 的实现里,einsum 是可以进行优化的,去掉不必要的中间结果,减少不必要的转置、变形等等,可以提升很大的性能,将 einsum 的实现改一下:
def einsum():res = np.einsum('ik,kj->ij', a, b, optimize=True)
加了一个参数 optimize=True,官方文档上该参数是可选参数,接受4个值:
optimize : {False, True, ‘greedy’, ‘optimal’}, optional
optimize 默认为 False,如果设为 True,这默认选择‘greedy(贪心)’方式,再看看速度:
einsum cost: 2.0330937dot cost: 1.9866218
可以看到,通过优化,虽然还是稍慢一些,但是 einsum 的速度与 dot 达到了一个量级;不过 numpy 官方手册上有个 einsum_path,说是可以进一步提升速度,但是我在自己电脑上(i7-9750H)测试效果并不稳定,这里简单的介绍一下该函数的用法为:
path = np.einsum_path('ik,kj->ij', a, b)[0]np.einsum('ik,kj->ij', a, b, optimize=path)
einsum_path 返回一个 einsum 可使用的优化路径列表,一般使用第一个优化路径;另外,optimize 及 einsum_path 函数只有 numpy 实现了, tensorflow 和 pytorch 上至少现在没有。
最后,再测试 einsum 与另一个常用的函数 tensordot,首先定义两个四维张量的及 tensordot 函数:
a = np.random.rand(128, 128, 64, 64)b = np.random.rand(128, 128, 64, 64)def tensordot():res = np.tensordot(a, b, ([0, 1], [0, 1]))
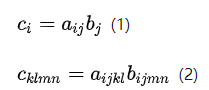
该实现对应的公式为:

所以 einsum 函数的实现为:
def einsum():res = np.einsum('ijkl,ijmn->klmn', a, b, optimize=True)
tensordot 也是链接到 BLAS 实现的函数,所以不加 optimize 肯定比不了,最后结果为:
print("einsum cost:", Timer("einsum()", "from __main__ import einsum").timeit(1))print("tensordot cost:", Timer("tensordot()", "from __main__ import tensordot").timeit(1))# einsum cost: 4.2361331# tensordot cost: 4.2580409
测试了 10 多次,基本上速度一样,einsum 表现好一点的;不过说是一个函数打天下,肯定是做不到的,还有一些数组的分割、合并、指数、对数等功能没法实现,需要使用别的函数,其他的基本都可以用 einsum 来实现,简单而又高效。
经过进一步测试发现,优化反而出现速度降低的情况,例如:
def einsum():temp = einsum('...->', a, optimize=True)def test():temp = a.sum()
上面两中对数组求和的方法,当a是一维向量时,或者 a 是多维但是规模很小是,优化的 einsum 反而更慢,但是去掉 optimize 参数后表现比内置的 sum函数稍好,我认为优化是有一个固定的成本。
还有一个坑需要注意的是,有些情况的省略号不加 optimize 会报错,就拿上面的栗子而言:
np.einsum('...->', a, optimize=True) # 正常运行np.einsum('...->', a) # 报错
很无奈,试了很多次,不加 optimize 就是会报错,但是并不是所有的省略号写法都需要加 optimize ,例如:
使用省略号实现上面两个公式并不需要加 optimize ,能够正常运行
np.einsum('i...->...', a) # 正常np.einsum('...,...->...', a, b) # 正常
但是如果碰到下面的公式:
上式表示将 a 除第一个维度之外,剩下的维度全部累加,这种实现就必须要加 optimize。
np.einsum('i...->i', a, optimize=True) # 必须加optimize,不然报错
再举一个栗子:
c = (a * b).sum()# 如果不知道a, b的维数,使用einsum实现上面的功能也必须要加optimizec = einsum('...,...->', a, b, optimize=True)
总结一下,在计算量很小时,优化因为有一定的成本,所以速度会慢一些;但是,既然计算量小,慢一点又怎样呢,而且使用优化之后,可以更加肆意的使用省略号写表达式,变量的维数也不用考虑了,所以建议无脑使用优化。
原文链接:
https://zhuanlan.zhihu.com/p/71639781
◆
福利时刻
◆

推荐阅读



