美国“忠诚僚机”项目概念与技术现状
由于作战环境的高度动态化、不确定性以及飞行任务的复杂性,各种基于程序化的自动控制策略已经不能满足未来先进多功能无人机对于复杂作战环境下的多任务需求,具有自主能力的无人机系统将成为新的发展趋势。2016年3月,美国防部副部长沃克向媒体阐述了“忠诚僚机”(Loyal Wingman)概念,旨在通过为F-16“战隼”战斗机设计和研制一种人工智能模块,增加无人机自主作战能力,确保美空军在未来战争中实现无人驾驶的F-16四代战斗机与F-35A 五代战斗机之间形成高低搭配,通过有人-无人编队协同作战,有效摧毁空中和地面目标。
本文系统梳理了关于“忠诚僚机”的相关重要概念与技术现状,其中包括“忠诚僚机”自主作战概念、无人机自主作战技术概况、无人机自主技术架构,以及美国空军研究实验室自主技术发展4个目标。

1. “忠诚僚机”自主作战概念
2015年,空军研究实验室(AFRL)正式启动了“忠诚僚机”的概念研究,发布了需求公告。该公告要求应开发自主技术有效增强美空军未来在对抗和拒止环境下的作战行动和能力,此外应能够将有人驾驶战斗机与具备自主作战能力的无人机实现有效集成,完成协同作战,提高作战效能。该公告同时指出无人机应尽可能携带更多数量的武器,充当F-35的弹药库,能够对空中和地面目标实施打击。
“忠诚僚机”BAA公告公布了2020-2022财年自主技术无人机整合验证计划。在2020财年,项目主要验证对地攻击概念。无人僚机主要承担空地武器发射平台并充当有人长机的目标指示器。该验证的作战场景为GPS和局域通信被一定程度干扰的环境,不考虑动能或直接的能量威胁。无人机应能在各方位角和海拔高度使用多种辅助设备(例如GPS制导,激光制导及武器数据链制导)完成打击。同时,忠诚僚机应能够根据作战需求对当前路径、目标等进行再规划和调整,并具备作战效果评估的能力。在2022财年,该项目主要验证了有人-无人“忠诚僚机”编队的对敌方空中防御的压制能力(Suppression of Enemy Air Defenses, SEAD)。此时的验证场景为GPS被一定程度干扰、欺骗、敌方防空系统存在、电子战、有限数量的敌方威胁以及暂时性的卫星通信干扰环境。
作为SEAD平台,无人机应能够对作战区域内敌方发射器进行感知、辨别和定位,同时应具备进行独自或编队电子战的能力。无人机单机或编队应同有人长机进行战术协同,能够根据优先权和目标反应在防区内/防区外进行反辐射作战。无人忠诚僚机的作战角色有:充当武器发射平台,对有人长机指定目标发动攻击;对无人机感知到的目标集实施打击;为有人长机吸引防空火力并摧毁威胁目标;实施防区外干扰;作为ISR的信息融合节点。BAA公告重点指出,自主技术的应用将会直接提升有人-无人编队的作战能力,将会是未来开发的重点。
整个验证计划重点研发技术包括:
(1)对作战环境动态自适应的任务计划能力;
(2)传感器融合技术,包括无人机感知数据及其它平台的传感器资源等;
(3)战斗辨别、优先排序及分发功能等;
(4)通讯及对环境限制的适应性;
(5)飞行控制;
(6)针对不同作战环境、负载、通讯情况的自适应导航界面和负载管理技术;
(7)任务结束后的人-机任务报告技术。
从作战效果上来看,“忠诚僚机”的作战概念将有人五代机与四代无人机组合搭配成作战编队,借助五代机的作战网络节点角色,能够充分发挥四代机机动性好和火力充足的优势,从而加强二者在空战中的杀伤力。这种有人-无人的自主编队主要包括编队集合、编队保持、编队重构以及由有人长机指挥的分散行动四个关键组成部分。作战编队的自主性能够获得最优化作战路径,降低作战风险,而在面对变化的作战环境时,自主算法能够相应地对路径进行更新。下图展示了忠诚僚机自主作战优化的基本流程。整个流程首先对边界情况及已确认威胁信息进行初始化,并先提出初始猜想,然后根据流程对最优化解进行非线性搜索。
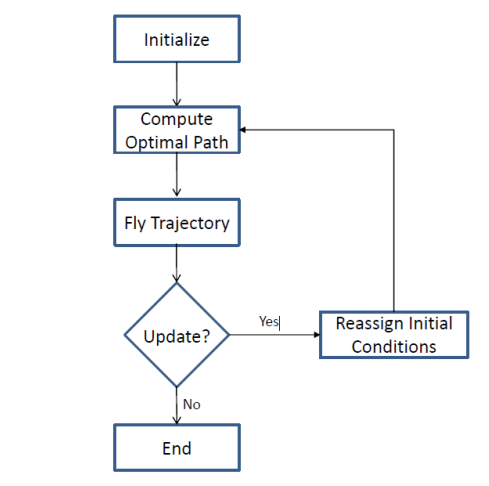
忠诚僚机优化作战流程图
在实施作战时,忠诚僚机自主作战编队应能完成以下五项作战任务:
使用较低的通讯带宽,明确接收有人长机的作战任务;
通过与长机的通讯,僚机应自主计算出任务规划;
僚机确认通信并向长机通告作战目标的可行性;
在无需再向长机通告的情况下开始执行任务,完成作战目标;
在作战环境改变或作战目的改变时,对作战计划进行动态修改。
根据目前无人机作战框架,已经提出了一种忠诚僚机可能的作战场景:在作战编队中,有人长机将会指挥四架无人僚机(比如由F-16战斗机改装的Q-16靶机)进行协同作战。长机对单独的忠诚僚机的分配内容包括对两个分离的目标实施打击,并在固定时间、固定位置回到编队中,同时这种控制规划必须需要考虑到作战风险和所需燃料的最小化。在该种作战概念下,在高危险作战中具备自主功能的无人机可在五代有人机前面扮演突防的角色,承担发现、摧毁目标的任务,而有人机可在对方防空火力之外进行指挥控制,避免遭受敌方打击。
2. 无人机自主作战技术概况
从“忠诚僚机”项目的开发可以看出无人机自主作战正吸引着越来越多的兴趣。由于作战环境的高度动态化、不确定性以及飞行任务的复杂性,使得规划与决策成为当前无人机新的技术挑战。各种基于程序化的自动控制策略已经不能满足多功能无人机对于复杂作战环境下的多任务需求,所以在有人-无人编队作战项目中,采用自主作战技术的3D编队分布和飞行控制算法是编队实现动态调整,完成作战任务的关键。
自主作战(Autonomous Operations) 是美国海军研究办公室及空军研究实验室(AFRL)的传感器飞机项目组于2000年提出的作战概念。自主作战是不需要人的干预以最优的方式执行给定的作战策略,并且具有快速而有效地自主适应的能力,以及在线对环境态势的感知、信息的处理和控制的重构。自主与自适应的区别可以认为是这两种方法所能处理不确定性的量值,自适应可以少量地补偿中等程度的不确定性,自主则可以对在不确定动态变化环境中出现的大量不确定性实现控制。为了深入研究无人机自主作战能力,AFRL定义了10个自主控制级别(Autonomous Control Level,ACL)对无人机自主程度进行量化衡量。下图展示了AFRL定义的自主控制级别和当前典型无人机系统所处的任务自主性情况。
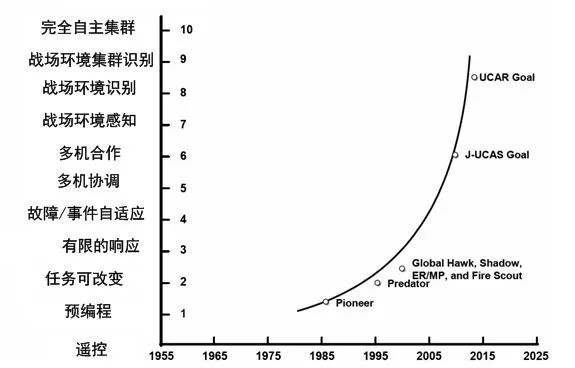
AFRL定义的无人机自主控制等级及典型无人系统自主性情况
3. 无人机自主技术架构
下述的无人机自主架构是根据广泛应用于NASA项目(例如 Deep Space 1 Remote Agent)的远程代理架构改编的。这种代理架构使用了一种感知-思考-执行的闭环控制系统。代理系统首先对所处环境进行感知并确定其所在的状态:这不仅包括外部状态(位置、海拔等),还包括系统内部状态(通讯状况、燃料储量及关键结构维修状况等)。状态更新将包括从操作人员获得新的目的地、从其它无人机系统获得态势感知以及操作人员下达的新指令、新任务等。系统接下来对获得的指令进行思考,并决定如何完成这些指令。在一些情况下,系统已有现成计划来完成特定任务,但面对新情况可能会需要制定新计划。计划确定后,系统执行计划并等待反馈结果来更新此时状态,形成闭环控制。
无人机中的自主架构将其功能分布在载荷、平台、控制中心和操作人员上。举例而言,无人机可能会具有足够处理能力对目标进行长远规划,但不一定能够对传感器数据进行有效分析。在这种状况下,传感器数据将会被发送至控制中心并由操作人员分析(在有人-无人编队作战中,控制中心可设置在有人长机中)。大多数自主系统在传感器系统,无人机及任务方面都是具有普适性的,所以其可集成在不同的无人机系统中。下图展示了此自主系统的整体架构图。
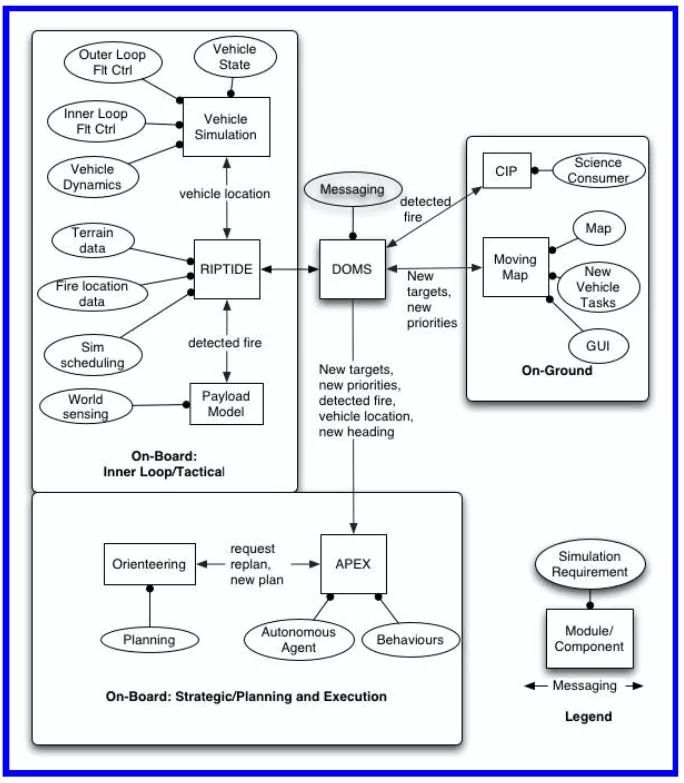
根据外界输入及载荷进行再计划的自主架构
4. 美国空军研究实验室自主技术发展目标
针对当前自主技术的发展现状,美国空军研究实验室提出了自主系统技术发展规划,其目的是为自主系统提供更好的弹性、能力和多功能性。整个规划有4大目标:
1.发展具备高效人机编队能力的弹性自主系统。确保飞行员能够与自主设备进行高效能组队,分享任务内容、任务理解以及态势感知情况,并具备对双方需求/功能自适应的能力。
2.多个自主系统能够进行活跃编队。智能机能进行自主编队,并具备开始、完成复杂任务的能力(单机或编队)。关键能力包括人工智能成熟化、分散/整合系统的管理技术以及可靠、安全、可共操作的通讯技术。
3.在动能/非动能威胁环境下的任务持续能力。关键能力包括先进的自保护技术、竞争环境下确保态势感知能力的技术。
4.在计划外和动态环境下保证系统安全有效。关键能力包括复杂、不确定、动态环境下人工智能和决定系统的稳定性、人机通讯和互动的可靠性、数据中心自主系统的安全架构等。
5. 结 语
目前各国均很重视无人机的开发、研制,赋予其更多的使命。随着自主技术的发展,无人机将会向多功能、快速反应及高可靠性方向发展。随着以“忠诚僚机”为典型的无人作战系统的开发应用,无人机在未来将不仅能执行情报侦察、战场监视、目标指示任务,还会在电子干扰、防空压制、空中格斗、对地攻击等方面崭露头角,并最终有望替代有人机,实现全无人机作战,成为未来作战的主力。
作者丨学术plus评论员 张昊
来源丨学术plus






