只要跑得够快悲伤就追不上你,但GPS可以啊!
天上飞的,地上爬的,水里游的...... 世间万物都在运动,只不过因参照不同而有快慢之分。

为了掌握不同物体的运动规律,制造出更快更强的工具和设备,测速,就成了一个重要的命题。
还记得课本上是怎么教你测算速度的吗?

利用打点计时器可得到两点间距离和所用时间,两者的比值即为两点之间的平均速度|高中物理试题
大多数测速方法,核心原理都是利用速度的定义,即物体运动的路程除以运动所用的时间。如果是变速运动,为了获知速度怎样随时间变化,可以通过缩短测量时间、增加测量次数来实现。
近代几百年间,人类科技飞速发展,目前对于长度和时间的测量,已经能达到很高的精度,比如长度可以测量到亚原子级别(约10-12米),原子钟的计时精度,可以达到10-15秒(上百亿年才有1秒的误差)。
加上超声波、电磁波、激光这些工具,理论上,我们在地面上看到的一切物体,都能测速。
早期,对于带轮子的交通工具,被用来测速的是机械式的转速测量仪器。速度表与转轴直接相连,可以直接测量车子轮轴的转速。
现在用的更广泛的,是测速传感器,利用光电或磁电原理,产生周期性的电信号,并据此算出速度。

轮速传感器在车轮转动时会产生并传递电信号,转化后可得到车轮转速|repairpal.com
在高速公路上,出于安全考虑,必须严格控制车辆的速度。
这时候常用的测速方法有区间测速,就是在路上固定两个监测点,记录车辆通过的时间,据此计算区间内的平均速度。记录的方法可以很多样,比如人见人怕的超速拍照。
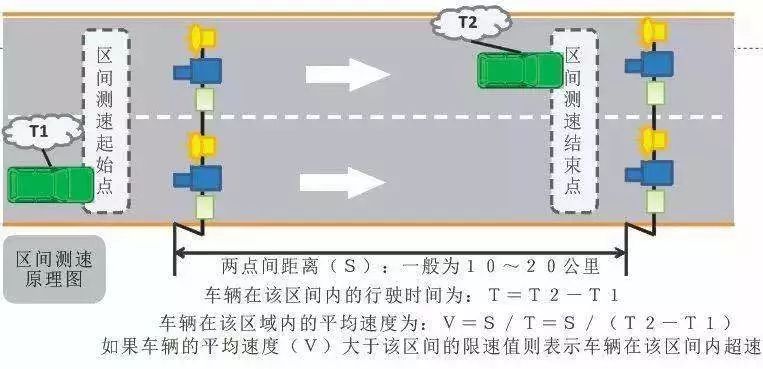
图丨 sina.com.cn
还有一种是雷达测速,利用了光波的多普勒效应。
物体运动时,碰到仪器发出的光波,反射波的频率会因此发生变化。频率的变化和物体速度有关,利用这个特点,只发出和接收一个脉冲信号就可以获得车辆的速度信息。
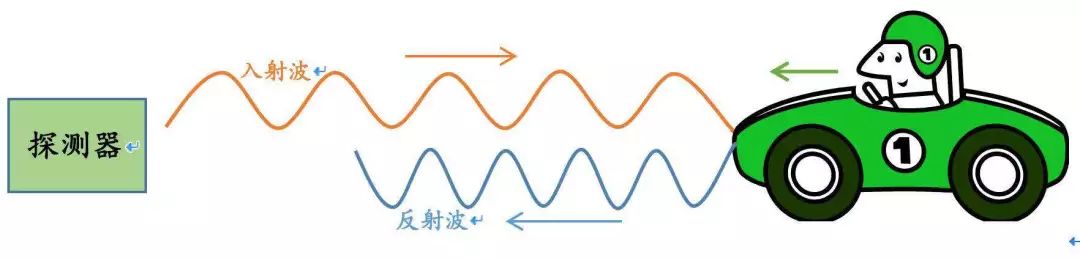
雷达测速的原理|作者供图
对于一些高速运转,无法近距离测量的物体,测速方法可谓是花样百出。
飞机的速度是怎么测出来的?答案是利用飞行时受到的气流压力。
飞机上自带测速用的空速管,又叫大气传感器。

飞机上的空速管 | zh.wikipedia.org
飞行时气流从空速管流入,管内的感受器能测出气流的压力,而气流压力和飞行速度有关,通过计算就能知道速度。
另外飞机上都有惯性测量装置,能测量飞机的加速度(速度随时间的变化),通过一些数学处理也能算出速度,不过这种方法的精度会随飞行时间的增加而下降。
还有一个大招,通吃地球上几乎所有的交通工具,那就是GPS测速。
只要你在物体上放置卫星定位装置,通过接受天上几个不同位置的卫星发出的精确时间信号,就能精确定位物体位置的移动和时间,测速自然小菜一碟。
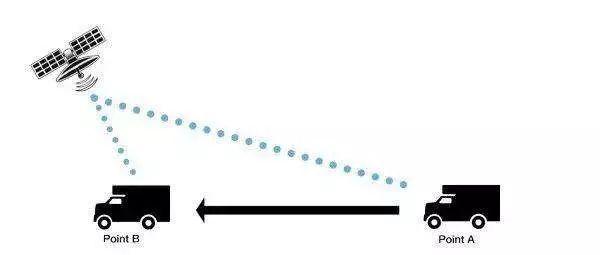
图丨stackexchange.com
运动场上,更是各种测速黑科技大显身手的时候。
比如在网球、羽毛球等各种高速球类运动中,常见的测速手段是雷达测速枪以及速度追踪系统。
赛场边设置的雷达测速枪,通过电磁波的频率改变来计算球的瞬时速度。

雷达测速枪|Athla youtube channel
在赛场高空处设有速度追踪系统,多架高速摄像机追踪球的飞行轨迹,以记录下运动员在绝杀扣球时,球所能达到的最高速度。
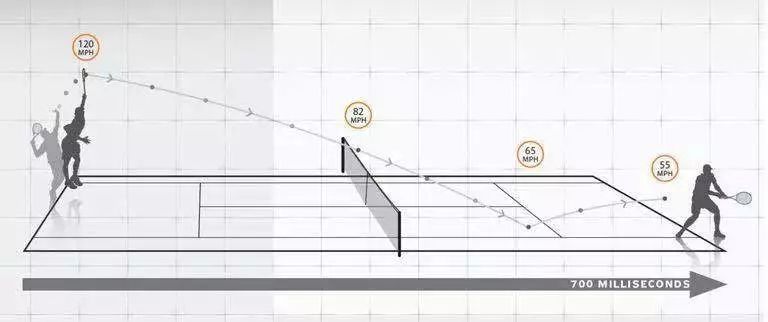
图丨popularmechanics.com
编辑:张帅琰,胡晓,李小葵
少年编委:周子乔,李淏嘉,张枥元,郑之玥,闫瑾坤,厉佳宁
本文首发于:
果壳少年(ID:guokr_junior)
如需二次转载请联系原作者,
欢迎转发到朋友圈。
果壳
ID:Guokr42
果壳整天都在科普些啥啊!
吓得我二维码都屈光不正了!