网络化多智能体系统已成为许多工程系统不可或缺的一部分。多智能体系统中的协同决策面临许多挑战。本文将研究信息及其对智能体的可用性对多智能体系统中协同决策的影响。
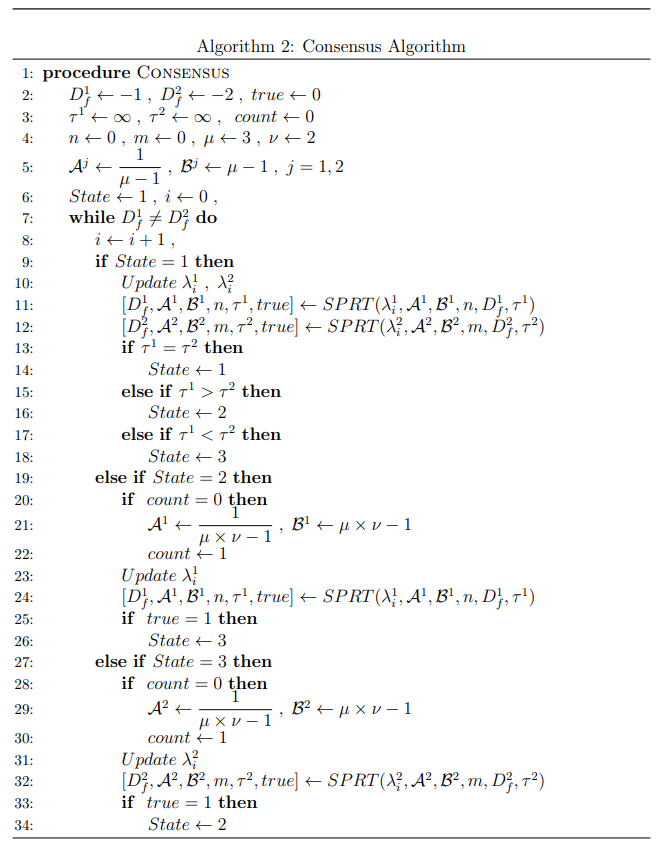
本文考虑了使用两个观测器从观测数据中检测马尔可夫模型和高斯模型的问题。考虑两个马尔可夫链和两个观察者。每个观察者观察真实未知马尔可夫链状态的不同函数。给定观察结果后,目标是找出两个马尔可夫链中哪一个产生了观察结果。本文为每个观察者提出了块二元假设检验问题,并证明每个观察者的决策是局部似然比的函数。本文提出了一种共识方案,让观察者就其信念达成一致,并证明了共识决策对真实假设的渐近收敛性。使用两个观测者检测高斯模型时,也考虑了类似的问题框架。为每个观测者提出了序列假设检验问题,并使用局部似然比求解。考虑到观察者随机和不对称的停止时间,提出了一种共识方案。本文引入了 “信息价值 ”的概念,以理解为达成共识而交换的信息的 “有用性”。
接下来,考虑有两个观察者的二元假设检验问题。自然界有两种可能的状态。有两个观察者,他们收集的观察结果在统计学上与真实的自然状态相关。假设这两个观察者是同步的。观测者的目标是根据观测结果,共同找出真实的自然状态。考虑采用集中式和分散式方法来解决问题。每种方法都分为两个阶段:(1) 构建概率空间:已知真实假设,收集观测数据以建立假设与观测数据之间的经验联合分布;(2) 给定一组新的观测数据,为观测者制定假设检验问题,以找到他们各自对真实假设的信念。提出了让观察者就其对真实假设的信念达成一致的共识方案。比较了集中式方法中错误概率的衰减率和分散式方法中就错误信念达成一致的概率的衰减率。比较了集中式方法和分散式方法的数值结果。
多智能体系统中一个智能体的事件集中的所有命题可能无法同时验证。研究了文献中的事件状态运行结构和不相容关系的概念,并将其作为研究事件集结构的工具。举了一个多智能体假设检验的例子,在这个例子中,事件集并不构成布尔代数,而是构成了一个正晶格。还讨论了 “非交换概率空间 ”的可能构造,其中包含不相容事件(无法同时验证的事件)。作为这种概率空间中可能存在的决策问题,考虑了二元假设检验问题。提出了解决这一决策问题的两种方法。在第一种方法中,将可用数据表示为来自通过投影估值度量(PVM)建模的测量结果,并检索使用经典概率模型求解的底层检测问题的结果。在第二种方法中,使用正算子估值方法(POVM)来表示测量结果。证明,第二种方法实现的最小错误概率与第一种方法相同。
最后,考虑了学习经验分布的二元假设检验问题。在任一假设下,观测值的真实分布都是未知的。经验分布是从观测数据中估计出来的。利用经验分布序列解决一系列检测问题。经验分布下的信息状态和最优检测成本向真实分布下的信息状态和最优检测成本的收敛情况如图所示。还给出了最佳检测成本收敛的数值结果。