
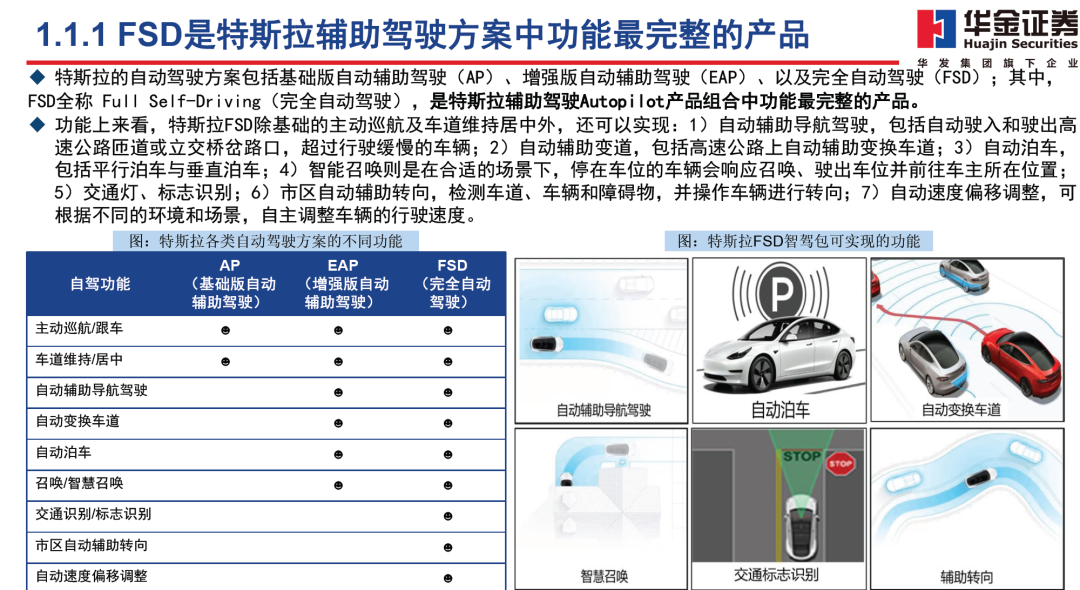
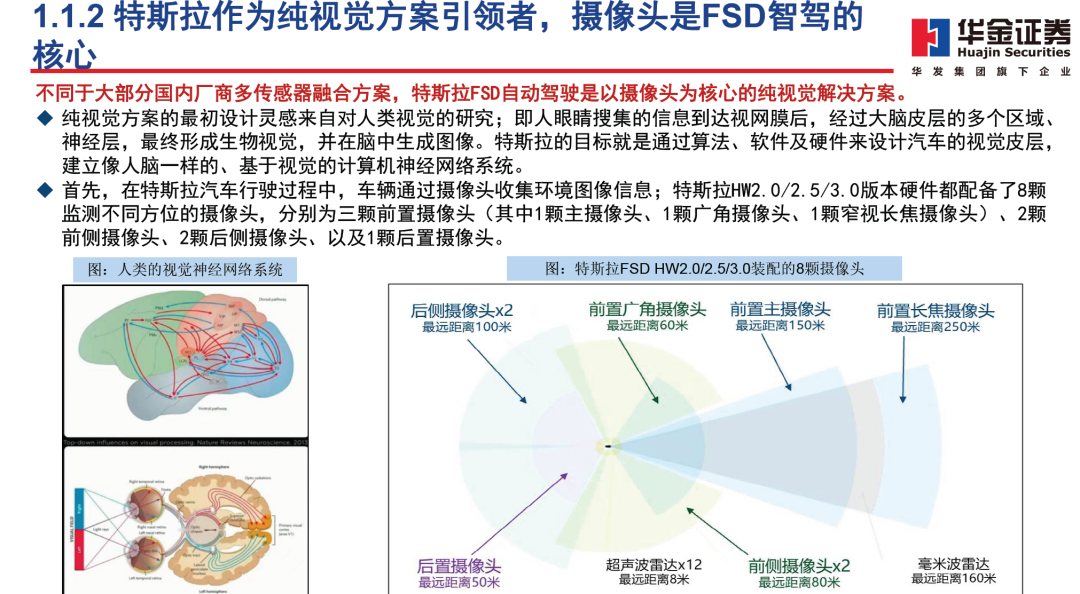
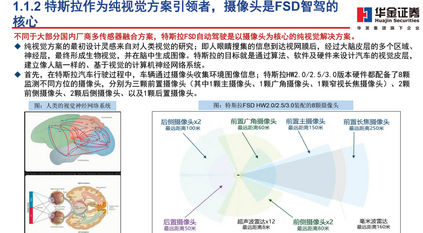
不同于绝大多数国内车企在自动驾驶上采取多传感器融合方案,特斯拉FSD在发展初期就摒弃激光雷达、且不配备高清地图,成为在感知层以摄像头为核心的纯视觉解决方案代表;其依靠车身搭载的摄像头来捕捉周围的环境信息,并经过算法及神经网络模型处理,最终输出3D场景下的信息用于智能驾驶。 FSD智能驾驶的实现基于特斯拉独树一帜的软件算法,创新性的提出BEV+Transformer+OccupancyNetwork的感知范式,并成为全球首家“端到端”神经网络量产上车的企业,实现了从繁琐规则驱动到数据驱动的简化,小鹏、蔚来等多家国内车企纷纷追随;硬件端方面,特斯拉持续增加摄像头数量,对其他传感器则倾向于做“减法”,以更好地适配其纯视觉技术路线。 得益于数据量、算力投入、硬件适配度等方面的明显占优,特斯拉在依赖算力的纯视觉解决方案上遥遥领先国内厂商,FSD智驾拟人化程度高、安全性及可靠性更为凸显、且能有效节省运算空间及成本;但同时,FSD作为纯视觉方案在恶劣天气等场景下的性能较弱,其买断价也较国内市面上其他高阶辅助驾驶软件更高,或系特斯拉需改进的方面。 中国作为全球新能源汽车最大的市场,是各车企发展智驾的最优之选;然而,缺乏冗余设计或引发的驾驶安全问题、以及缺少测绘资质或带来的数据安全问题,均成为阻碍特斯拉入华的重要因素。硬件设计方面,特斯拉在HW4.0中重新加入高精度4D毫米波雷达,纯视觉方案的驾驶安全性问题或有望改善;数据安全方面,特斯拉则借力百度获得车道级导航地图,并拟在中国建立数据中心。截止2023年年底,特斯拉在中国市场的累计销量超过170万辆;假设FSD在现役中国特斯拉汽车中渗透率为5%-36%,预计新增收入54.4亿元-391.68亿元。
成为VIP会员查看完整内容
相关内容
Arxiv
224+阅读 · 2023年4月7日
相关主题

相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日