

航空潜艇(aerosubs)是既能在空中飞行又能在水下行驶的航行器。1939年俄罗斯工程师Boris Ushakov提出了 "飞行潜艇"[1]的概念,随后包括RFS1[2]、1964年的convair项目[3]等的进一步发展,然而,到目前为止,对这种飞行器的高级开发的尝试有限。这在很大程度上是受到与设计和操作相关的挑战影响。基于对文献的回顾,作者旨在介绍一个航空潜艇(QFS-20)的理论设计,以期解决设计和操作问题,包括动力、进入和离开水面。
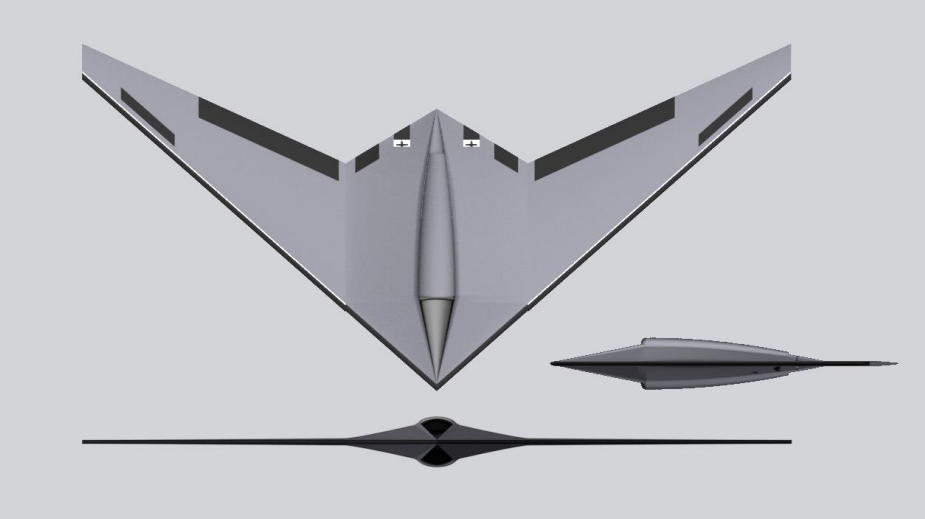
航空潜艇(QFS-20)的理论设计
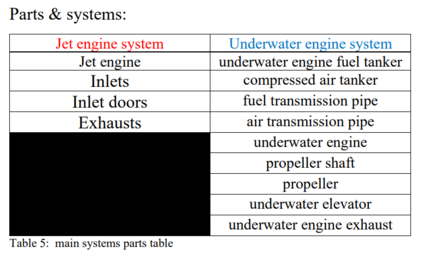
QFS-20是一个理论设计的航空潜艇,在飞行过程中由喷气发动机提供动力,在水下航行时由两个水下螺旋桨提供动力。
设计QFS-20的想法来自于军事侦查行动。通过小型潜艇识别潜艇或船只的过程可能非常缓慢。解决方案就是QFS-20,QFS-20设计了从起点到作业区的飞行距离,而不是水下航行,这减少了从起点到作业区的航行时间。在操作区,QFS-20将直接进入水中,以保持自身的隐蔽性,当QFS-20在操作区的操作结束后,它将飞往装货地点。
能够在两个不同的环境中运行是设计航空潜艇的一个巨大挑战,QFS-20的这个挑战的解决方案包括:
1.疏水表面,减少了水与表面的粘性
2.火箭增速器,在出水时增加水下的速度
3.可关闭的进气口和排气口
4.水下推进器
QFS-20的要点之一是直接进入和离开水面(飞泳),而不是先在水面上降落,然后在水下航行(飞泳-降落)。QFS-20也是直接出水,而不是以前的设计,即飞行器在水面上降落,然后起飞(出水地-飞)。

成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2023年5月17日
Arxiv
0+阅读 · 2023年5月17日
Arxiv
224+阅读 · 2023年4月7日
相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年5月17日
Arxiv
0+阅读 · 2023年5月17日
Arxiv
224+阅读 · 2023年4月7日