200余支队伍参赛,清华大学2019年国际大学生类脑计算大赛奖名单揭晓!

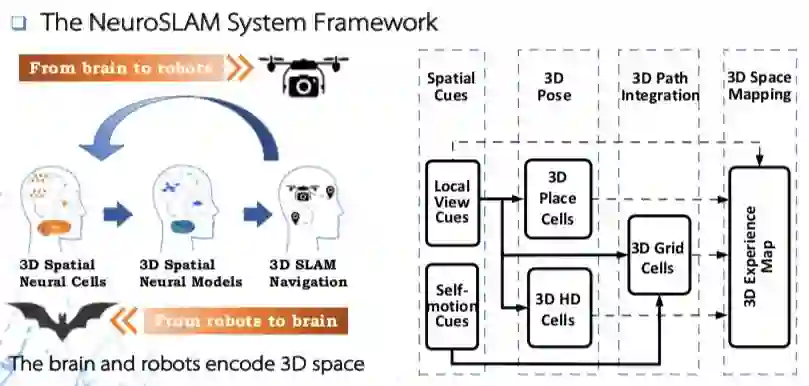
【导读】近日,2019年国际大学生类脑计算大赛在清华大学举办。大赛吸引了国内外科研机构的200余支队伍报名参加,经过激烈的角逐,来自中国地质大学(武汉)与昆士兰科技大学合作的参赛作品摘取特等奖的桂冠,获得30万元的奖金。









来源:人民日报,新智元 编辑:张佳、段亮亮
广告 & 商务合作请加微信:kellyhyw
投稿请发送至:mary.hu@aisdk.com
登录查看更多
相关内容
专知会员服务
33+阅读 · 2019年10月23日
Arxiv
6+阅读 · 2018年4月30日





相关VIP内容
专知会员服务
33+阅读 · 2019年10月23日
相关资讯
相关论文
Arxiv
6+阅读 · 2018年4月30日