ECCV2020 最佳论文提名 | 流感知技术
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
前一段时间,ECCV2020公布了最佳论文提名奖,卡耐基梅隆大学以《Towards Streaming Perception》荣获该奖项.他们开发了一种新的衡量自动驾驶汽车对不断变化的交通状况的反应能力的标准,这使比较感知系统的准确性和反应时间首次成为可能.
论文链接:
https://arxiv.org/abs/2005.10420
代码链接:
https://github.com/mtli/sAP
自动驾驶以及虚拟现实等应用都需要低延迟的算法来支撑,为了保证安全和提供给用户足够的视觉沉浸感,算法的延迟标准应该和人类对场景改变的反应时间保持一致,通常是200毫秒。近来的计算机视觉算法也开始考虑延迟(Latency)对算法性能的影响,但也仅仅是在离线环境下考虑如何提高算法的准确率(Accuracy),并在二者之间寻找一个平衡点。
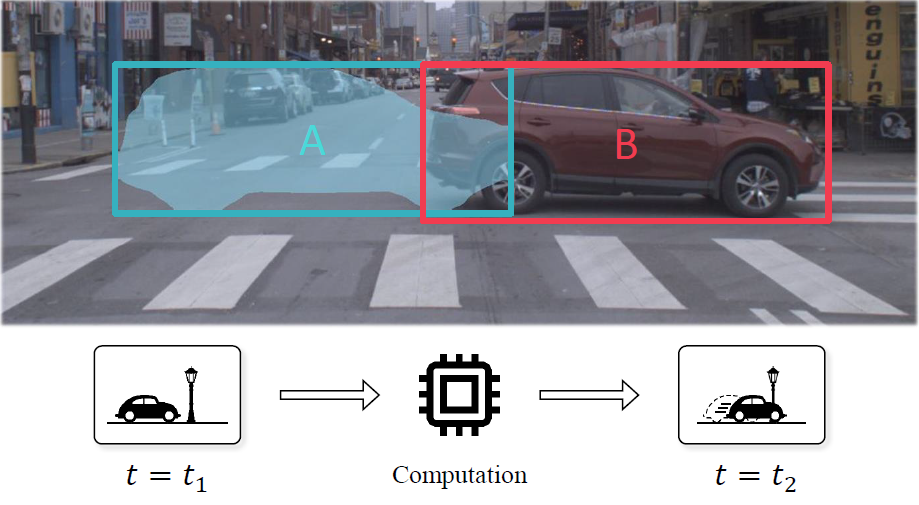
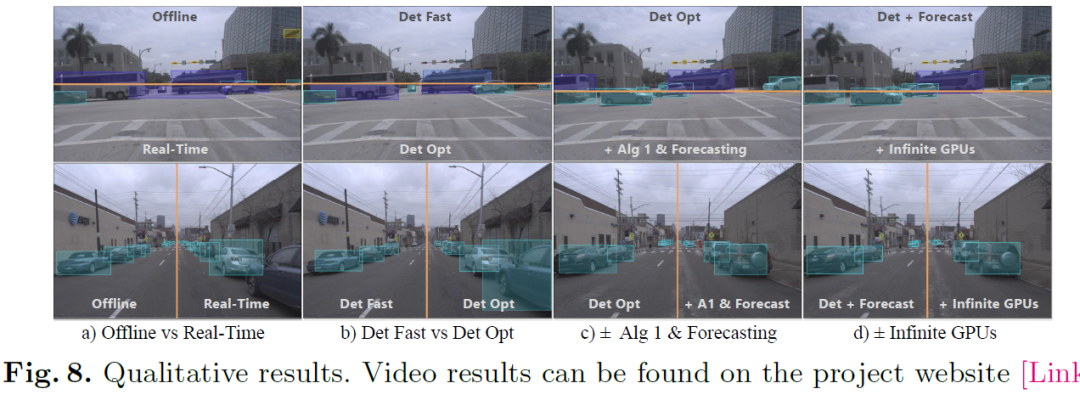
以这种评估方法优化得到的算法还无法应用在实时在线的感知场景中,因为当算法完成对某一帧图像的处理时,比如200ms后,周围的环境就已经发生了变化。如下面的视频所示,算法在得到第一帧中车辆的分割结果后,车辆就已经运动到另一个位置了,那此时所得到的分割结果的意义就很小了。
本文提出了一种方法可以将延迟和准确率结合起来应用在实时的算法评估中,作者称之为“流准确率”,并在此度量的基础上,提出了流感知的元基准,可以将任何单帧任务转换为流感知任务。
2 实验效果
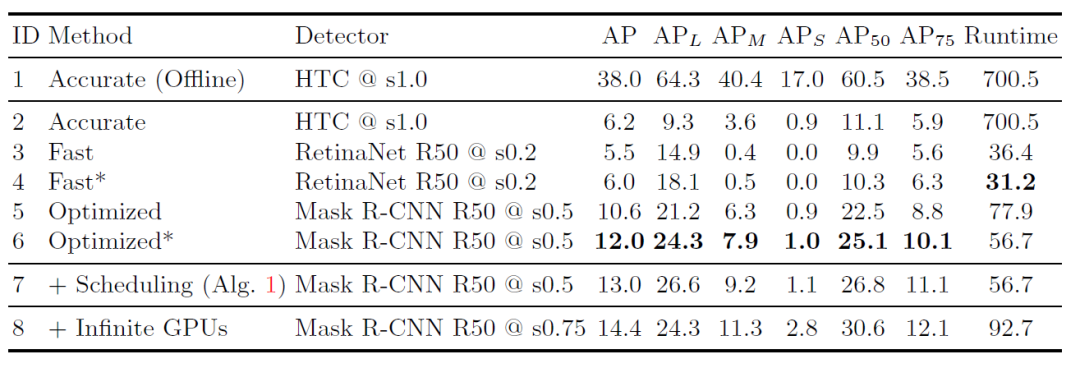
Single GPU vs Infinite GPUs
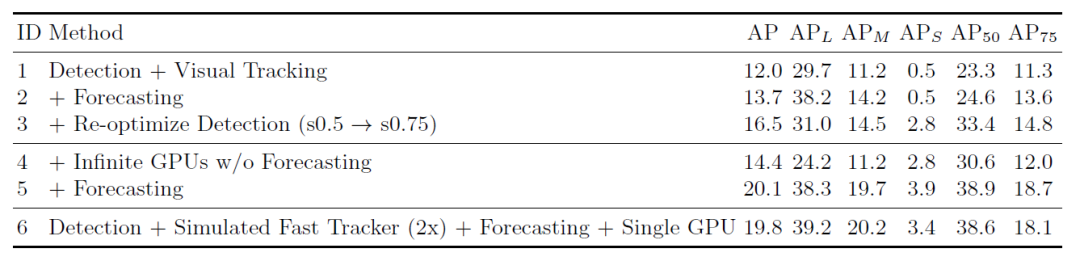
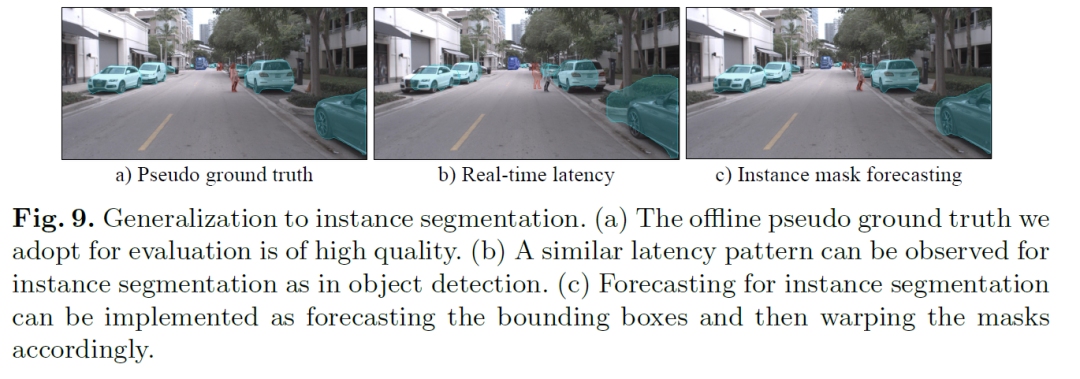
Instance Segmentation
Forecasting
Detectors Only
3 数据对比
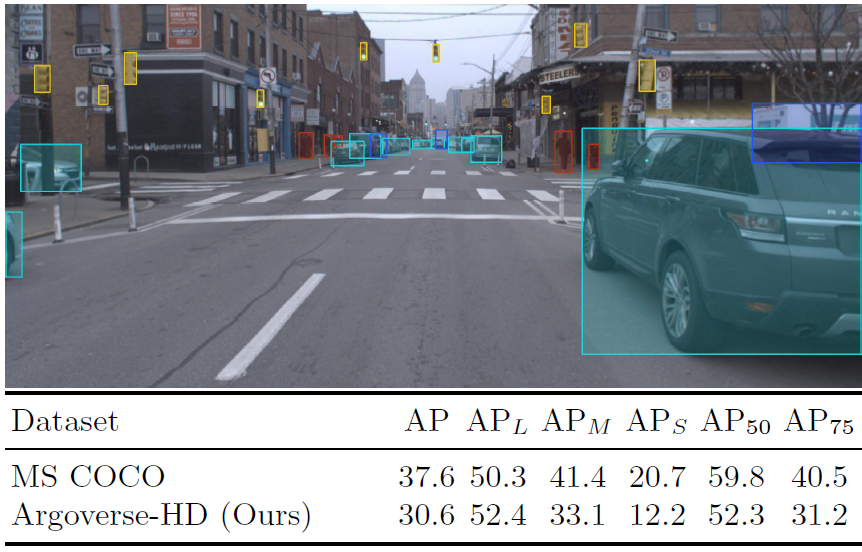
作者选择了Argoverse1.1数据集,作者重点选择其中的RGB图像数据,对其做了额外的密集标注构成了Argoverse-HD(High-frame-rate-Detection),新数据集中每个场景的视频的帧率为30FPS,同时标注密度与该帧率保持一致.
从0到1学习SLAM,戳↓

交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
投稿、合作也欢迎联系:simiter@126.com

扫描关注视频号,看最新技术落地及开源方案视频秀 ↓





