盘点中国最先进腿足机器人,部分已接近应用!未来你可以骑着机器狗上班了

中国科学院外籍院士、外专千人计划入选者、中国政府友谊奖获得者福田 敏男(Toshino Fukuda)正在竞选2019年IEEE总主席,此次是亚洲人首次竞选IEEE主席。福田教授多年来为中国与世界各国的学术交流及合作做出了巨大贡献,广大IEEE会员及机器人行业同仁们可以进行投票支持,扩大亚洲在IEEE的影响力。
IEEE网址:ieee.org/elections
投票:Directvote.net/ieee
投票时间:2018.8.15-2018.10.1 EDT USA时间下午1时,UTC时间下午5时
腿足机器人是机器人领域还没有到应用阶段就异常火爆的一类产品,相比那些只能靠轱辘运动的机器人,带腿的机器人看起来既炫酷又极具未来感,而且仿生的结构又让人感觉非常可爱。
中国对于腿足机器人的研发,虽然相比美国起步较晚,但近期也有了一些还不错的产品。在2018年世界机器人大会的赛场上便汇聚了一批国内最先进的腿足机器人,进行了一次角逐。

(2018世界机器人大会上进行比赛的机器人)
这些腿足机器人算得上中国在这领域的未来方向了,机器人大讲堂下面就带大家探秘一下这批机器人:

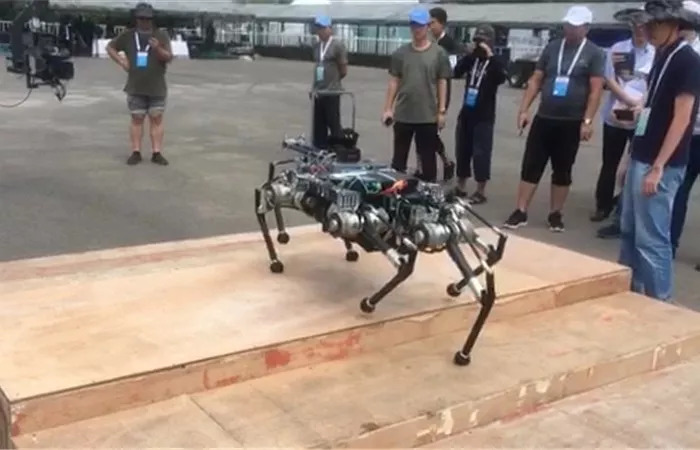
这只号称中国首个四足机器人的“莱卡狗”,爬、行、拖、拉样样都行,还十分听话!重量仅22kg,但其自行研发的电机系统能输出高达18千瓦的瞬时功率,算出来功率密度比一般的超级跑车还高将近一倍,这是莱卡狗强大动态性能的基础。另外莱卡狗也已经完全摆脱了外部供电,自带电池一次充电可以支持2~3小时的行走。
下面是宇树科技模仿波士顿动力拍摄的一段测试视频,视频中莱卡狗爬上了斜坡、穿过了石板路,以及再现了那个经典的被测试人员用脚踹的场景。当然,测试的结果是莱卡狗与波士顿动力的BigDog一样,稳定性表现的很优异。

北理哪吒由北京理工大学运动驱动与控制研究团队研发,是一款轮式、足式和轮足复合式运动的机器人平台。该机器人高1.4米,长1.2m,宽1.2m,自重160Kg,总功率15KW,最大能承载300kg。足式运动续航时间1小时,轮式运动续航时间2小时,轮足复合运动续航时间45分钟。可用于无人作战、抢险救援、物资运输、资源勘探等领域。

机器人可以实现四轮驱动的轮式运动。最大运动速度可达30km/h,最大爬坡角度为25°。四个轮子可分别相向转动45度,实现顺时针和逆时针原地旋转。机器人可以自动探测障碍物,当宽度大于机器人当前轮距时,自动变轮距实现越障,轮距调整范围0.5-1m。当高度高于机器人底盘时,能自动调整底盘实现越障。机身高度调整范围为1.2m-1.5m。
在保持机身平稳的前提下,机器人四条腿可以向外伸展,实现变轮距和变轴距运动。通过环境感知系统探测路径,机器人可实现直线、90度转弯、以及S型弯道等循迹运动。机器人结构中心对称,没有前后左右之分。因此,可实现纵向和横向行走,也可实现快速对角步态足式行走。机器人通过安装在脚上的触觉传感器,可实现不平地面的漫步行走。
如此“魔鬼的步伐”,戳下面视频可见~
下面就是名气在外的浙江大学四足仿生机器人“绝影”啦。

浙大控制学院、浙江大学工程师学院朱秋国说:“‘绝影’的表现表明,中国的四足机器人技术已经能够对标国际一流水平。” 它身长1米,四足站立时60厘米高,重70千克,这样的个头,意味着能够胜任许多实际任务。
“绝影”靠电机驱动,最大负载20千克,最快行走速度为每小时6公里,续航时间2小时。它已经掌握了跑跳、爬梯子、在碎石子路上行走、自主蹲下再站起来等许多能力。
“绝影”的技术优势正如视频中展现的,动作自然柔顺,反应快速准确,面对复杂环境能表现出很强的适应力。就拿 “踩钢管”来说,“绝影”在踩到钢管即将失去平衡的瞬间做出决策,以一系列动作快速调整了姿态。这种“连人都未必做得到”的表现,有赖于系统和控制两方面高效结合。
团队在既有基础上完善了“绝影”的算法,使其在运动上更加智能。正确决策要转化为快速反应,需要发达的“神经系统”。“绝影”采用了实时性最好的操作系统,并自主开发一系列驱动程序,使信息的传输大大提速。“绝影”一举一动所包含的那种栩栩如生的神韵,还尤其要归功于精妙的机械设计。“就像人类的四肢一样,‘绝影’的四肢也是力控的,不像流水线上硬梆梆的机械臂那样沿着严格的轨迹死板运动,从而可与环境实现更好的交互。”

在2018世界机器人大会上,上海交大高峰教授团队携带的新型六足机器人“青骓”参加了比赛。“青骓”采用自主开发的电机传感复合驱动器,实现了力觉动态控制行走,轻量化设计让机器人具备了更高的功率自重比,六足3-3步态行走具有更高的稳定性。该机器人以优越的性能和稳定的发挥,获得比赛冠军!
今年,高峰教授团队还公布了两款灾后救援六足机器人。第一款机器人的走路方式,特别像一只横着走的大螃蟹。这款机器人主要用于野外环境探测与作业。可以代替救援人员携带检测设备进入发生事故的地点,探测灾后环境,搬运救灾物资等。通过在身体上方安置其它机械臂、消防龙头等,还可以执行开关阀门,清除障碍物以及灭火等作业任务。也可以在湿热、辐射等复杂环境下执行作业任务。
第二款机器人为六足并联机器人,又被称作“章鱼侠”,它具有视觉、力觉、识别地形、主动避障、自主开门、感知外载、自主平衡等各项功能。而这款机器人最突出的优势是它的负载能力与全向运动性能。它能够负载超过300kg(之前有媒体报道上交大类似外形的‘章鱼侠’能负重600kg)而且能够满足各个方向的运动需求。这款章鱼侠的移动速度可达1.2km/h,从演示动画上来看它还可以搭载其他作业工具完成相应动作,比如拧阀门和拆穿墙壁等。


2014年9月,我国自行研制的120千克某型军用山地四足仿生移动平台首次被媒体曝光,这种山地四足机器人由中国北方车辆研究所兵器地面无人平台研发中心研制。该型机器人的出现标志着,中国在军用仿生机器人的技术上已经与美军旗鼓相当,在实用化进展上紧随美军步伐。这只四足大狗主要用于山地及丘陵地区的物资背负、驮运和安防,可以承担运输、侦察或打击任务。另外,在道路设施被破坏较严重的灾害现场也能发挥作用。平台自重130kg;任务搭载能力:50kg;最大行驶速度:6km/(平整铺装路面);克服斜坡:30°;续航能力:2h。

山大机器人研究中心的四足机器人中,小型的面向科研教育的平台Billy已经实现产业化生产。Billy的运动能力是国内同级别同尺寸机器人所无法比拟的,无论是平衡性、坡度训练,还是适应能力方面。但由于成本较高,主要是面向科研教育,儿童可以跟它对话、讲故事,实现简单的陪伴功能。机械狗上的高动态伺服压作动技术,已在其他一些领域得到应用。山大机器人研究中心研发制造的四足机器人,除发动机外,都属自主研发。核心技术的零部件性能,基本能实现发达国家性能的60%-80%。
除了上面几个多足机器人,国防科大、哈工大等高校和科研机构也研发成功过不少不同种类的多足机器人。上海交通大学教授、国家重点基础研究发展计划(973计划)首席科学家高峰在2018世界机器人大会期间表示,在世界范围内,腿(足)式机器人还没有广泛的应用,但是前期的研究和技术已经实现突破,技术的发展已经接近应用阶段!


工程院院士 蔡鹤皋丨北航教授 文力丨深醒科技 袁培江丨深之篮 魏建仓丨 大然科技 张春松
一飞智控丨深醒科技丨发那科丨柔宇科技丨优傲机器人丨宇树科技丨臻迪科技丨iRobot
①工业 缝纫机器人丨无人智能采矿机器人丨中国饺子生产线自动化车间丨MIT 建筑机器人
②服务 索尼机器狗 Aibos丨叠衣机器人 FoldiMate丨日本 骑自行车机器人丨有触觉机械手 LUKE丨达芬奇机器人丨机器人乐队丨空中飞车丨日本护理机器人合集
③特种 丰田人形机器人丨水下机器人 探索号丨俄罗斯人形机器人 FEDOR丨美国重型机械 Guardian GT丨波士顿动Atlas 360度后空翻丨中国四足机器人 Laikago丨北理工 四轮足机器人丨佛罗里达研究院 “机械鸵鸟|大然 变胞机器人
④仿生 3D打印 仿生机器人 丨东京大学 流汗人形机器人丨柔性电池丨哈佛 柔软肌肉丨哈佛 RoboBee
英特尔 宋继强博士 | 中民国际 刘国清丨陈小平教授 |驭势科技 姜岩丨浙大 熊蓉教授|长江学者 孙立宁丨上海大学 无人艇专家团|新松总裁 曲道奎丨北航 王田苗教授|863专家 李铁军教授丨北邮 刘伟教授|清华 邓志东教授丨清华 孙富春教授|天津大学博导 齐俊桐丨哈工大 杜志江教授|长江学者 王树新丨甘中学教授 | 硅谷创客 赵胜
意向合作,文章转载, 均可联系堂博士
商务合作:13810423387(同微信)
内容合作:15611695072(同微信)






