
过去几年,海上无人系统在现代战争中的应用取得了飞跃式发展。自主数据处理、水下通信与导航技术的进步,正在为反潜战等更复杂的应用开启大门。传统的有人反潜作战能力通常伴随高昂的运营成本、有限的可用性以及在风险区域的脆弱性。通过利用新技术,用低成本无人系统增强现有反潜作战能力,可以成为力量倍增器。在此背景下的一个特定用例,是设计用于近期、小规模冲突的自主北约反潜战屏障的开发。为此,一个由静态和动态节点组成的网络,充当“绊网”,当潜艇穿过时被触发。一部或多部主动吊放声呐与被动节点相结合,可对(低速)入侵者进行基于多普勒的分布式检测。在2024年“机器人与无人系统增强型感知军事演习”中,与其他北约伙伴合作,成功演示了这种反潜战屏障的概念实施方案。实验性被动海底节点与一艘配备吊放声呐的水面无人艇一同部署在海底。所有资产均使用“智能自适应长/短程水声网络”协议栈,实现了完全自主的机载目标探测、跟踪和结果水声通信。通过使用“协同自主任务层”协议,实现了不同北约国家资产间的互操作性,允许其他合作伙伴对目标进行跟踪打击。实验证明了使用无人系统增强传统反潜作战能力的潜力。本文将详细阐述该“系统之系统”的实施,并展示所取得的成果。
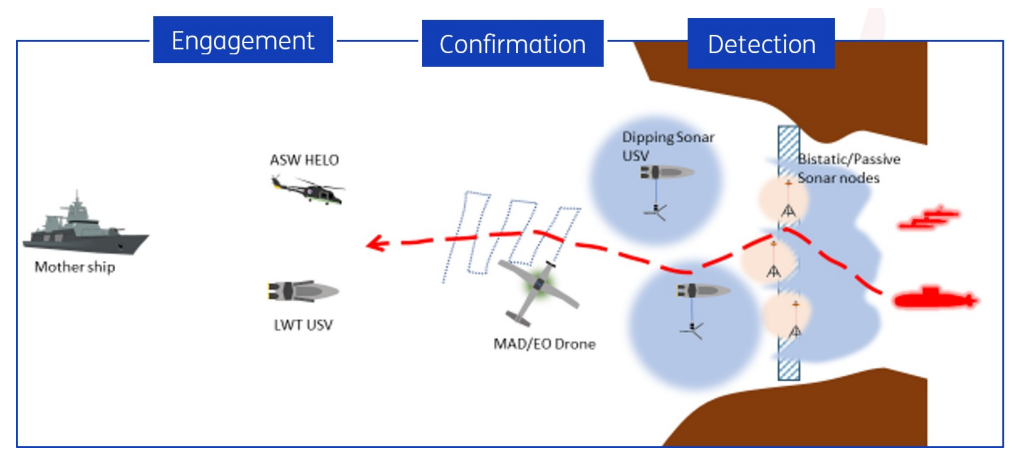
图1. 为监控潜艇通过阻塞点或港口附近而设想的反潜战屏障交战链示意图。
图1描绘了设想的一个反潜战屏障实施方案的完整交战链概览,示例场景为敌方潜艇企图通过一个阻塞点或离开港口。最初,结合使用主动和被动资产对潜在入侵者进行探测。探测之后,进行接触目标的交接,以便由其他传感器(例如声呐浮标或携带磁异探测器的无人驾驶航空器)进行确认。在得到肯定确认的情况下,可以进行交战以阻止敌方潜艇继续其任务。本文将重点阐述从探测阶段到为确认而进行交接的这一过程。
在早期的研究中,为了使这个提出的解决方案具有可扩展性并保持低成本,做出了一些设计决策。该屏障使用主动(分布式)声呐进行目标探测。如果仅仅依赖被动声呐,现代潜艇被动特征的减弱会严重限制探测距离。由主动声源发射的对多普勒敏感的脉冲,与被动、便携式、固定式节点结合使用,可以探测低速入侵者,并极大地缓解了因使用小型传感器节点而产生的混响限制。
被动节点通常以线状配置部署在海底,节点间距数公里,共同构成一个虚拟屏障。主动声源由一艘或多艘无人水面艇操作的一部或多部吊放声呐代表。吊放声呐在激活时是固定的,但本质上是动态的,以便在认为必要时重新部署。由于被动节点没有连线,它们依靠水声通信来传输数据。水声通信典型的数据吞吐量较低,要求节点进行显著的数据缩减。节点配备了处理硬件,需要具备高度的自主性,涵盖从原始水听器数据构建声呐图像,直到包括目标探测、跟踪和通信。开发反潜战屏障是北约的一项倡议。因此,重点在于使所有资产在交战链的所有阶段都能在不同国家间互操作。这意味着要使用和/或开发高水平的标准化。操作和通信尽可能遵循现有或即将出台的北约标准化协定。
