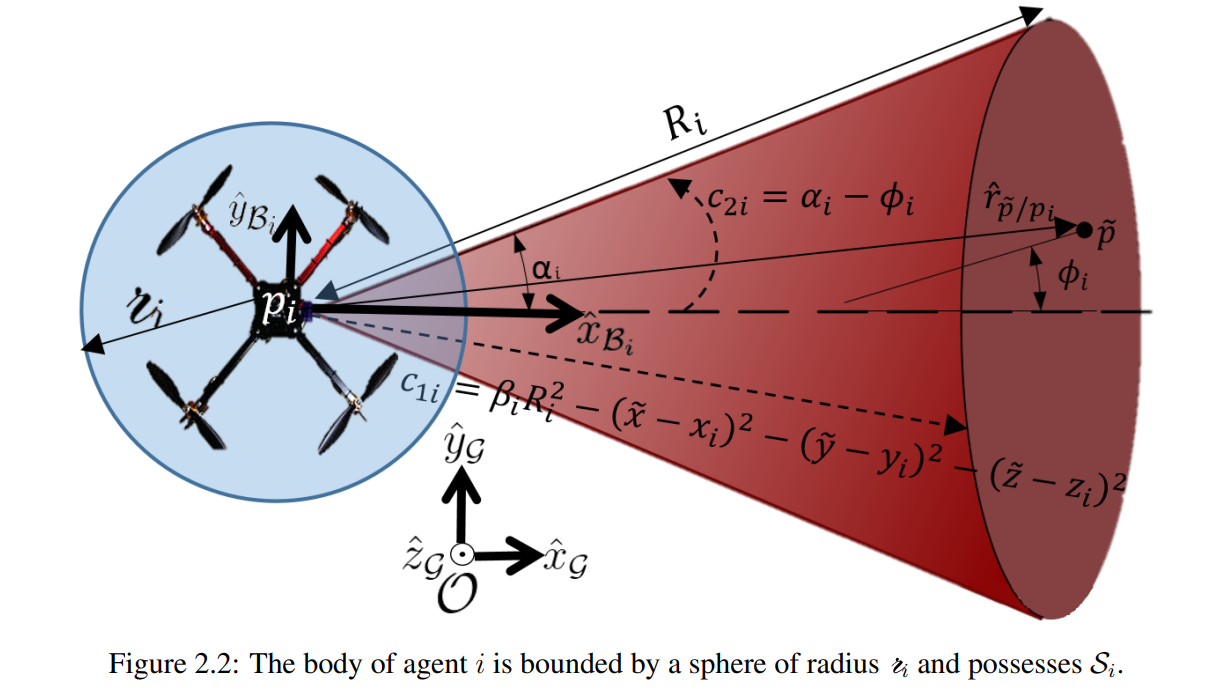
这篇论文中,作者提出了一套控制、估计和决策策略,使小型无人驾驶飞机系统和自由飞行的航天机器人能够充当智能移动无线传感器网络。这些智能体的主要任务是从环境中收集信息,以提高网络和人类合作者的态势感知能力。这些信息是通过一个抽象的传感模型--前向各向异性球面扇形--收集的,通过调整其调整参数,该模型可通用于各种传感模型。
首先,推导出一种混合控制策略,根据该策略,一组无人飞行器可以动态覆盖(即随着时间的推移将其感知足迹扫过域中的所有点)指定空域。假设这些飞行器的电力资源有限,因此提出了一种智能体部署和调度协议,允许智能体在覆盖环境的同时定期返回充电站。此外,还规定了有关能量感知域划分和智能体航点选择的规则,以便在整个网络中分配覆盖负荷,并提高剩余电力供应较大的智能体的优先级。这项工作被扩展到考虑三维空间中嵌入的二维流形的覆盖问题,这些流形会受到随机入侵者的碰撞。在避免碰撞、及时向充电站靠拢以及友好智能体及时拦截入侵者等方面提供了形式上的保证。本章最后介绍了一个案例研究,在该案例研究中,人类充当了动态覆盖监督员,即通过手势来指导机器人选择应该勘测的区域。
其次,态势感知的概念被扩展到由与航空或航天机器人近距离工作的人类组成的网络。在这项工作中,机器人充当人类的助手,帮助人类完成一系列相互依存、空间上相互分离的多任务目标。人类佩戴着增强现实显示屏,机器人必须在线学习人类的任务位置,并将这些任务的摄像头视图播放给人类。任务位置是通过高斯混合模型期望最大化的并行实施来学习的。从学习到的任务集中选择任务由马尔可夫决策过程执行,该过程由人类使用 Q-learning 进行训练。在获得 IRB 批准(HUM00145810)的 24 名人类受试者实验中,机器人任务选择方法与监督方法进行了比较。
论文最后讨论了作者在贝叶斯推断路径规划方面的另一项案例研究。此外,论文还讨论了动态覆盖和人机交互方面的未决问题,以便为今后的工作指明方向。
以下是本研究的贡献摘要:
-
受各向异性传感和刚体运动学影响的三维多智能体动态覆盖网络的正式混合控制策略、
-
必须定期返回补给站的 MWSN 的能量感知部署和调度,为智能体的安全提供正式保证、
-
随机入侵者的检测和轨迹估算技术,为智能体的拦截提供形式保证、
-
通过手势指令实现人类监督动态覆盖的混合模型、
-
一种无监督学习算法,通过该算法,空中合作机器人和自由飞行器可以估计与任务相关的摄像机视图集,然后将这些视图提供给它们的人类伙伴、
-
一种基于 MDP 的监督学习算法,通过该算法,人类可以强化从上述视图集中依次选择视图的能力。
本论文中反复出现的几个概念及其与主要贡献之间的联系如图 1.15 所示。
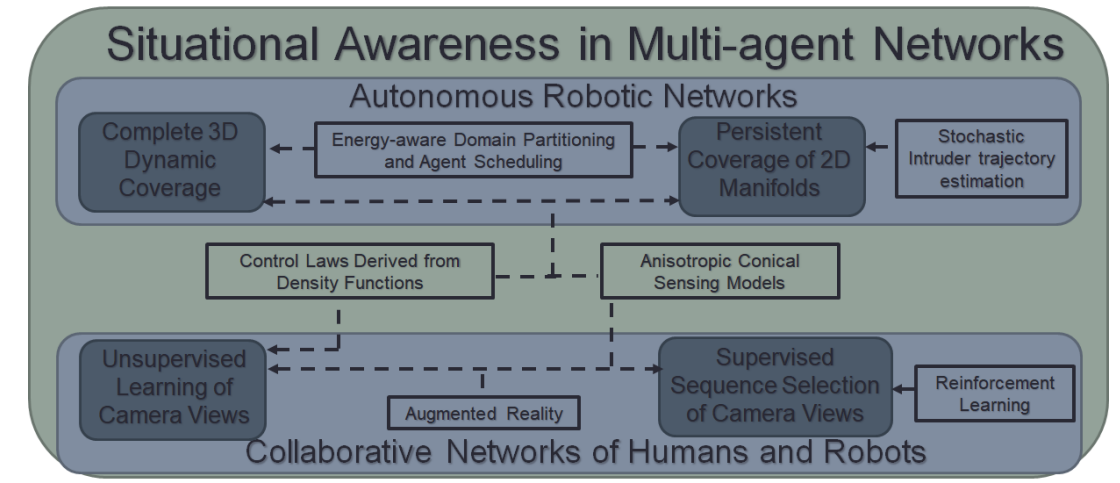
图 1.15:本论文中反复出现的几个概念,包括传感模型和沿密度函数的车辆制导。它们与主要贡献之间的联系如上图所示。
提纲
第 2 章包括本论文在功率受限动态覆盖方面的贡献。它提出了一种无人机混合控制策略,可保证三维环境的完全覆盖。这项工作发表在 2017 年的《自主机器人》上(见第 1.4 节)。这项初步工作为在更为复杂的环境中处理持续覆盖问题奠定了基础。智能体现在的任务是覆盖嵌入 R 3 的二维流形,该流形会受到随机生成的入侵者的影响。这项工作发表在 2019 年的《自动》(Automatica)上(见第 1.4 节)。第 2 章最后介绍了基于手势的覆盖案例研究,其中人类充当了半自主智能体的动态覆盖监督员。这项研究将工作从完全自主的网络过渡到人机协作网络,旨在维持人类队友的态势感知。
第 3 章专门讨论人机/空间机器人协作。该章介绍了在多任务环境中在线学习和选择相关摄像机视图的研究。这项工作的成果是由数据驱动的,来自机构审查委员会(IRB)批准(HUM00145810)的分布式航空航天系统与控制(DASC)实验室的人体实验。这项工作的成果已于 2020 年 1 月提交给《国际机器人研究杂志》,目前正在接受评审。
第 4 章将总结本论文的主要贡献以及一些其他案例研究,并讨论动态覆盖和人机/空间机器人协作领域的未决问题。随后将讨论附录,附录中的数学推导对于论文主体来说过于冗长。