自动驾驶的“大脑”-控制工程篇(二)
点击上方“专知”关注获取专业AI知识!

自动驾驶的“大脑”
——控制工程篇(二)

中国人工智能系列白皮书
-智能驾驶2017
▌自动驾驶控制技术方案
根据从行驶环境到驾驶动作的映射过程,自动驾驶控制技术可以分为间接控制和直接控制两种不同方案。
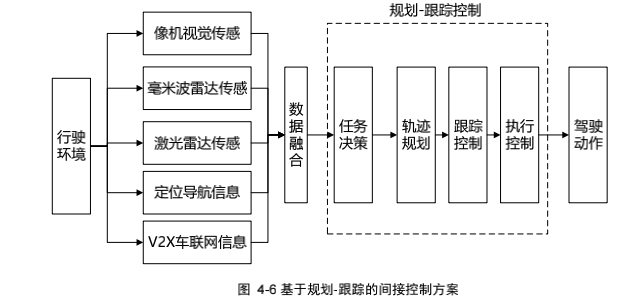
基于规划-跟踪的间接控制方法
自动驾驶间接控制是一类基于规划-跟踪的主流智能驾驶车辆控制方法。根据当前车辆行为需求,在满足车辆自身运动学和动力学约束条件下规划出一条空间上可行且时间上可控的无碰撞安全运动轨迹,然后设计适当的控制律跟踪生成的目标轨迹,从而实现自主驾驶(如图 4-6)。
早期的轨迹规划方法实际上是机器人研究领域的路径规划方法的某种扩展,80 年代后期被引入到智能汽车辆[63]。这类方法给出的路径由直线和圆弧线两种基本元素构成,由于曲率在线段连接点处不连续,迫使车辆运动到连接点处时需要停下来完成转向动作,导致车辆运动过程的不连续。要消除这种情况,一种方法是采用精确的位置传感器和高频跟踪控制器来实现;另一种是通过修改轨迹规划方法来获得平滑的连续曲率轨迹。显然,后者更具现实意义。
回旋曲线是一种被广泛应用于高速公路设计的线形表达方法,当用于连接直线和圆弧线时,能有效地起到平滑作用[65]。Nelson认为这类方法的缺点是轨迹表达式以弧长为参数,使用时需要进行积分,容易产生积累误差,并建议用五次多项式和极坐标样条以封闭式表达方式给出轨迹表达式。类似地,Bravo采用了刀样条。Fraichard在Reeds 和 Shepp的研究基础上,考虑了轨迹曲率和曲率变化率的限制,相当于用运动学特性来约束轨迹曲率,这种方法在低速情况下,例如辅助泊车系统中获得了较好地应用,但在车辆行驶速度较高时将无法适用。
基于规划的智能驾驶车辆的转向控制律的设计发展较为成熟。Tsugawa 等最先报道了采用视觉输入的比例控制方法解决自动驾驶车辆转向控制的问题。Broggi[72]在 ARGO 无人车中也采用了类似的经典 P 控制器。近期研究表明,经典 PID 控制法可以应用于某些典型路况,但控制精度难以保证。人工智能法为复杂系统的控制问题提供了一条新的途径,在自动驾驶车辆转向行为控制中已有很多应用的报道。Pomerleau 基于人工神经网络设计了自动驾驶车辆转向控制器。Naranjo 等利用模糊逻辑建立控制模型来模仿人类驾驶员的驾驶行为,研究了转向行为控制和换道行为控制。该方法中,控制规律和控制器先以驾驶员对驾驶经验的描述初步确定参数,再根据实验结果对参数进行调整至最优性能。Perez 等基于自适应神经网络的模糊推理系统设计了无人驾驶车辆控制器,可以直接从人类驾驶经验样本中离线获得控制器参数的配置。Onieva 等研究了遗传算法对控制器参数的离线自调整方法。Bageshwar 和 Keviczky 基于模型预测控制理论,分别研究了自动驾驶车辆自主巡航控制模型和主动转向控制模型。Zhang 和 Gong 等基于跟踪预估控制和模糊逻辑理论,研究了控制器参数的自调整方法。高振海和管欣分别提出了基于预瞄理论的其次自适应转向控制算法,及驾驶员确定汽车预期轨迹的模糊决策控制
模型。
基于人工智能的直接控制方法
自动驾驶的直接控制是一类基于人工智能的智能驾驶车辆自主控制决策方法。实际过程中如果控制对象的特性和环境的状态全部已知,即可以进行精确的数学建模,则基于传统控制策略就可以获得满意的控制性能。实际上汽车行驶环境包括行驶道路、周边交通和气象条件等诸多因素,具有高度的不确定、不可重复、不可预测和不可穷尽等特征,同时车辆本身的非线性、不确定性也很严重,很难建立精确的数学模型进行控制律的设计,因此传统控制策略已无法完全满足智能驾驶控制的要求。自动驾驶直接控制方法采用人工智能等手段,建立了从行驶环境到驾驶动作的直接映射过程,具体讲是在认知的范畴内试图建立一种先进的驾驶员模型以完成实际复杂驾驶过程,此外控制过程无需建立被控对象的数学模型,具有较强的机动性和实时性。
优秀的汽车驾驶员应具有过硬的汽车驾驶操作能力。不仅能够及时察觉、判断车内外环境的变化,还能够据此选择正确的方位和反应动作,从而有效地防止道路交通事故的发生。具体到简单场景(忽略道路中的其他车辆)的转向问题,优秀的驾驶员行为应至少具备:
正确的视觉注意机制,驾驶员的驾驶动作大部分是基于环境对视网膜的刺激,因此优秀的驾驶员在转向过程中视界应趋向于某些习惯的固定区域;
根据环境对视网膜的刺激而采取的正确安全的操纵动作,某一固定曲率的弯道必然对应合适的方向盘转角和打方向的时刻,而优秀的驾驶员则会通过合适地组合这二者的时序和大小达到理想的转向效果。
已有的基于人工智能的控制方法均需要较多的先验知识,且模型参数难以在线自适应,对环境的适应性差。近年来,利用增强学习来解决以上问题已经成为一大趋势。增强学习的基本原理是基于心理学的“试错法”,能够在与环境的交互过程中根据评价性的反馈信号实现序贯决策的优化,从而可以解决某些监督学习难以应用的优化控制始条件的假设”一直是尚未得到解决的问题。同时对于复杂大系统的求解,其算法收敛速度直接影响控制器的实时性,因此如何利用有限已知的信息提高学习算法的实时性也是当前的一个研究难点。
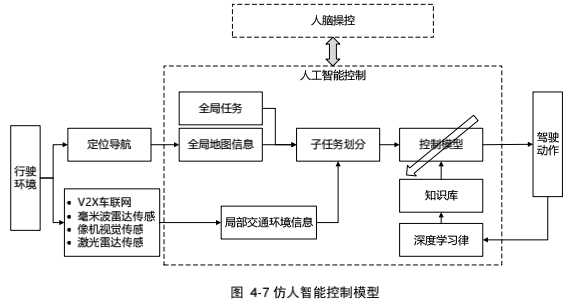
基于人工智能决策控制模型本质上是模拟人脑对外界环境信息和车体本身信息的感知(图 4-7),同时由驾驶经验并同在线学习机制来获得持续稳定输出的过程。因此如何建立合适的驾驶过程模型成为认知领域的一大难题。驾驶员行为的研究始于上世纪 50 年代,通用汽车研发人员希望通过研究驾驶员的行为,开发合理的辅助控制策略提高驾驶舒适性,降低交通事故率。通过对驾驶员驾驶样本数据的统计分析和系统辨识技术,建立基于某种场景的数学模型。
驾驶行为具有异常复杂的模型,其分类方法也不尽相同,一种分类方法将驾驶员模型分为:跟车模型、转向模型、驾驶负担模型和安全模型等。跟车模型的研究起步相对较早,研究人员先后提出了线性和非线性动力学模型、线性最优模型、神经网络和模糊逻辑模型等一般认为驾驶员转向模型研究的里程碑为MACDAM的最优预瞄模型,内学者郭孔辉也进行了相应的跟进研究,其研究思路基本上是基于车辆动力学和闭环操纵稳定性的研究,目的在于替代人类驾驶员从事专业且危险的汽车动力学测试工作,旨在对汽车设计过程进行指导,并没有涉及对无人驾驶车辆的转向控制的直接研究。据笔者的调研,到目前为止从学术界到工程界并没有建立一个公认的完善的转向控制模型。MACDAM 和郭孔辉等提出的最优预瞄理论并没有考虑航向偏差对最优预瞄模型的贡献,且其最优预瞄仅限于高速公路上具有光滑曲率的小曲率转向模型,在交义路口这样的城市工况下,其理论显然是不成立的。因此研究转向过程中具有普适性的的驾驶员生理特性成为建立转向驾驶模型的当务之急。M.F. LAND 在文献中提出驾驶员在转向过程中视线总是集中在转向内侧的道路边缘的“TANGENT POINT"(道路变向的点)。D.D. Salvucci 在 M.F.LAND 基础上提出了一种“两点”转向驾驶员模型,他指出驾驶员在转向过程中注视前方一个远点和近点,利用近点保持汽车在路中问行驶,利用远点补偿前方的道路弯曲,实验结果显示和驾驶员驾驶相近。
尽管生理学、心理学在研究驾驶员转向行为中取得了很多令人欣慰的结果,却极少有人将这些成果应用到自动驾驶车辆技术中。其原因主要是:前期研究的驾驶员转向计算模型都是基于某些固定的场景,获得的驾驶员模型适应能力较弱,距离工程应用还有一定的距离;
驾驶员模型的研究始于车辆工程领域,其目的多是为了研究汽车闭环操纵稳定性以及汽车动力学优化设计等。
▌人机交互系统
人机交互系统的作用和意义
人机交互系统作为智能驾驶的关键技术之一,对于智能汽车发展和应用有着十分重要的作用和意义,包括:
进一步提高智能汽车的可靠性和安全性。发展智能驾驶技术的一个主要目的就是提高了交通系统的效率和安全性。绝大多数情况下,智能汽车对于问题的反应和处理速度都要比人快的多,其安全性要比人为控制高很多。但智能汽车毕竟不是人脑,其算法的复杂程度更无法与人的思维相比,在一些比较复杂、特殊的情况,例如在通过一些无路、施工或恶劣道路地域时,人们可以方便快速的对智能汽车进行接管控制。
拥有更强的实用性和更加出色的用户体验。智能汽车的设计最终是要让其能够为人所用,更好的为用户服务,最大限度的满足人们的需求,人永远都是控制和享受服务的主体。优秀的用户体验对于智能汽车自然是必不可少的。
增强智能汽车的灵活性和机动性。优秀的人机交互系统可以使人们随时随地对智能汽车的行为进行干预,使其在处理问题时,能够根据实际情况的不同,按照人们的要求,采取更加合理的实施方案。
提高智能汽车的任务执行力。人们可以通过交互系统,方便的给智能汽车下达任务命令,进行远程控制,实时监控其任务完成情况,并可以随时对目标进行变更和修正,使智能汽车能够更好的应用于智能交通及国防科技领域。
智能汽车人机交互系统发展现状
目前世界上比较主流的人车交互系统主要有以下几种:
奥迪 MMI
奥迪多媒体交互系统 MMI(Multi Media Interface),它包含两个部分:终端操作装置和显示区域。终端操作装置位于换档杆和中央扶手之间;显示区域包括多媒体交互系统显示屏(位于中控台顶部)和驾驶员信息系统显示屏。在设计方面,两个部分都具有用户友好性和清晰易读性。
多媒体交互系统的终端操作装置具有最佳的操作便利性和清晰的布局,是一个依照人体工程学设计非常出色的控制装置。与仪表盘中的驾驶员信息系统显示屏一样,多媒体交互系统的显示屏不仅易于读取,而且安装于驾驶员的直接视线范围之内。显示屏和控制区域分别处于驾驶员能够直接读取和便于操作的位置,确保了道路始终在驾驶员的直接视野之中。
多媒体交互系统概念包含两个部分:终端操作装置和显示区域。终端操作装置位于换档杆和中央扶手之间;显示区域包括多媒体交互系统显示屏(位于中控台顶部)和驾驶员信息系统显示屏。在设计方面,两个部分都具有用户友好性和清晰易读性。
在行驶时,驾驶员信息系统显示屏显示车辆的最新数据以及电话和导航系统的状态信息(视设备而定),也可以读取基本的信息娱乐功能(例如选择无线电台或 CD 曲目)。这意味着大部分的重要信息始终处于驾驶员的直接视野之中。仪表盘显示屏与多媒体交互系统显示屏具有同样的外形风格,通过多功能方向盘上的菜单滚动键也可对其进行操作。
由于两个装置的操作原理一致,驾驶员从一个装置转向另一个装置时无需转换思维模式。驾驶员可以继续同样的操作逻辑。空调系统也是如此。鉴于温度调节对于驾驶员的重要性,空调系统采用了单独的控制装置,这个控制装置具备与多媒体交互系统相同的用户友好型操作逻辑。
奔驰 COMMAND
COMMAND 包括显示屏、控制器、功能按钮和电话键区,COMMAND 可操作车内的以下功能:音响功能、导航系统、电话和通信功能、DVD 视频和电视以及各种车辆设置。COMMAND 控制器正前方是四个功能按钮,可以直接控制光盘播放器/收音机、HOME(回家功能)、多方向可调座椅和电话/导航功能
COMMAND 的聪明之处在于其可以区分该功能是每日使用的(举例来说如电台的选择和交通信息的播放)还仅仅是单次的设置(举例来说如系统的设置和低音的设置)。这样做的结果是,会根据功能使用的频繁性来决定操作的先后顺序。菜单是根据项目的相互关联性和使用的频率来进行安排的。当在菜单上进行项选择时,系统会表明需要执行的操作路径。下一次当你再次选择这个菜单时,系统会直接显示该备选项目。这会减少操作的步骤。
而在竞争者的同类系统中,日常使用的功能通常位于子菜单中的,这就会增加所需操作的步骤。
宝马 iDrive
智能驾驶控制系统 iDrive(intelligent Drive system),它是一种全新的、简单、安全和方便的未来驾驶概念,属于自动化信息化驾驶系统的范畴,某些高级轿车和概念车上配备了这项最新的科技新技术。iDrive 的使用节约了设置传统控制装置大量空间,使设计人员可以发挥他们的才智,创新地进行车内设计,使之更加符合人体工程学,使操纵更加便捷,同时仪表板更加简洁。iDrive 使用起来非常简便。8 个主菜单分别为车内气候、通信(车载电话等)、娱乐(CD/电视等)、导航、信息、宝马服务支持、功能设置和帮助菜单。其中经常使用的前4 个主菜单可通过圆形旋钮向上下左右四个方向推拉控制器进入。以气候调节为例,3 次简单操作就可以调节车内不同位置的温度和气流分布,比如可以设设定某个座椅的加热从腰部位置开始(当然,这也归功于宝马的舒适性座椅),而气流是以某种流量按设定的方向吹出。
iDrive 具备记忆功能,驾驶者可以把某种设置储存,信息就自动储存在汽车"钥匙"中。宝马 7 系列的车钥匙是一个智能卡片,进入汽车后将之放入插座内,然后简单地按"启动/熄火"键发动/关闭发动机。另外,该电子钥匙还可自动储存汽车所需维修保养服务的信息数据,使客户可以获得更便捷的服务。
但是,宝马在新 7 系上推出 iDrive 系统时,由于操作相对较为复杂,曾引起巨大争议。在开车之前要阅读详细的说明书,一些人对此功能并不认同。在后推出的新 5 系上,宝马的 iDrive 系统已作为大大简化,这也使 iDrive 系统的优势充分发挥出来。
丰田 G-BOOK
丰田 G-BOOK 智能副驾系统于 2002 年在日本正式发布,是由无线网络、数据中心以及车载智能通信技术组成,其最基本的功能可以看作是导航系统功能的延伸和扩展。在功能逐渐扩展后,可为车主提供资讯、救援以及话务员直接服务等多种功能。
丰田 G-BOOK 有如下 7 项主要功能:话务员服务、G 路径检索、资讯提供、紧急救援、道路救援、防盗追踪、保养通知。
丰田 G-BOOK 在功能上主要是辅助设定导航、安全保障和资讯服务 ,没有太多的应用和扩展功能,与安吉星相比显得比较单薄。在安全保障方面,提供了最重要的事故自动报警和防盗追踪,但缺乏远程控制闪灯、解锁车门这些比较实用的功能。同时 G-BOOK 没有电话拨号和语音控制功能,行车中操作也比较繁琐。
苹果 CarPlay
CarPlay 是苹果公司发布的车载系统,即将用户的 iOS 设备,以及 iOS 使用体验,与仪表盘系统无缝结合。CarPlay,可以将 iPhone手机的绝大部分基础功能,通过汽车的控制面板来使用。其中的部分功能包括 Siri 语音助理工具,iTunes 音乐播放,苹果地图以及短信服务。通过 CarPlay,驾车人可以双手不离开方向盘就接打电话,另外可以听到语音邮件的内容,如图 4- 8 所示。

绝大多数汽车厂 CarPlay 绝对是又爱又恨的。毕竟原本的车载 CD机、硬盘、航仪和车载电话都是可以当做配置作为卖点,现在全部都被一个集成的 CarPlay 取代了。所以这点很大程度上限制了自主品牌加入 CarPlay 联盟,配置受到冲击。
支持苹果全 CarPlay 的具体车型还很少,只有法拉利 FF、梅赛德斯奔驰 C-Class 以及沃尔沃 XCS90 SUV 三种车型。而且现在 CarPlay移植于汽车上技术并不成熟,日内瓦车展上展出的法拉利样车,CarPlay 基本操作也会出现这样那样的问题。CarPlay 并非苹果的一大步,而更像是一个轻量级的 App,作用是把 iPhone 映射到车载中控屏幕上,而非真正的车载系统。就如苹果自己所说,“It's a smarter, safer way to use your iPhone in the car”,所以 CarPlay 只是一种辅助方式。
此外,从 CarPlay 的发布节奏来看,苹果试水的成分很大。作为全球最具影响力的 IT 公司,CarPlay 的发布几乎是用新闻通稿的形式传播,而且所有的展现形式都是通过合作伙伴来展示,这显得过于平常了。可以说,对于 CarPlay,我们无需给予太高的期望。但业界也有分析说,CarPlay 只是苹果公司进军车载系统的一个跳板,因此,对于CarPlay 我们要给予足够的关注度,说不定某天,CarPlay 在苹果公司的演变下就变成行业颠覆性产品了。
人机交互系统的核心技术
人机界面技术
人机界面技术的研究主要针对驾驶员和车辆驾驶信息的交互。从上个世纪九十年代开始,美国、日本、欧洲等开始立项研究如何利用信息和通讯技术来加强车辆的安全性和操纵性。如美国从 1960s 晚期就开始研发的电子路径导航系统(Electronic Route Guidance System);日本政府推出了复杂车辆交通控制系统(Comprehensive AutomobileTraffic Control System)等研究项目;欧洲实施的交通和安全先导计划([ROMETHEUS)等。这些项目的研究推动了智能交通技术的发展。各大汽车厂商,如 Honda,Toyota,Nissan,Bosch,BMW 等相继推出了自主的电子导航系统。而开放给用户的导航界面正是最早的人机交互界面。
随着车辆控制功能的持续增多,越来越多的研究开始关注于人机界面的设计,如 Toyota 的集成操纵按钮,BMW 的 i-Drive 系统,Nissan的人机交互界面等,如图 4-9 所示。一直到九十年代末期,中控台的主流设计风格依然是屏幕加按钮的形式。

一直到 1990 年,驾驶员在人车系统中和车辆的交互仅仅是通过转向盘,操纵杆和踏板等机构。但是导航系统的出现,使得驾驶员在操纵汽车的同时还需要分散一部分精力到 HMI 上。这势必将增加驾驶员的操纵负担,影响正常驾驶行为。因此,针对驾驶员在使用 HMI中造成的精力分散的问题,人们开展了对 HMI 的改进设计研究,并提出了很多 HMI 的设计准则错误!未找到引用源,如 UMTRI 设计准则;HARDIE 设计准则;ISO 也提出了车内 HMI 的相关设计准则。由于画面交互系统会分散驾驶员的目光,从而增加驾驶员的驾驶负担,为了解决这一问题,声音交互系统逐渐发展起来。驾驶员信息交互的研究开始于 1970s,但直到 1990s 车辆导航系统的出现才真正应用到商业产品中。在这一发展过程中个,研究人员开始认识到驾驶员在车辆行驶过程中的重要性。和传统汽车相比,驾驶员可以通过 HMI 实时的获得大量的车辆信息,在帮助驾驶员做出操纵判断的同时,也增加了驾驶员的精神负荷。在过去十年间,人们通过驾驶员负荷测量技术研究了驾驶员在利用 HMI 信息时的精神负担,这方面的研究结果对 HMI 的设计起到十分重要的作用,并且进一步推动了相关标准和设计准则的制定。
人机共驾技术
人机共驾技术的研究主要面向先进驾驶辅助系统。进入二十一世纪以后,人们对于车辆安全的研究已经从原先的被动安全转变为主动安全。1970 年,制动防抱死系统(ABS)第一次市场化应用标志着主动安全系统的开始。随后,电子稳定性控制系统(ESC),自适应巡航系统(ACC)等在 1990s 相继研发出来。除此之外,嵌入在 HMI 界面中的后视系统,车道保持系统(LK),车道偏离预警系统(LKW),盲点监测系统,辅助换道系统等也都相继展开了研究。
为了发展辅助驾驶过程中的人机交互系统研究,欧洲,德国,日本等相继启动了相关方面的研究项目。作为先进辅助驾驶系统中的一部分,驾驶员行为特性也得到了广泛的研究,如跟车行为,车道保持行为和制动行为等。
随着具有不同功能的 ADAS 系统的发展,多个 ADAS 系统和驾驶员之间的协调问题日益凸现出来。如果车辆上安装有多个 ADAS 系统,那么驾驶员将会收到多个预警信号和其他信息,尤其是在复杂工况下。这会使驾驶员感到困惑并无法对预警信号作出回应。对于辅助驾驶系统,人机交互是其中很重要的一环。随着越来越多的辅助驾驶系统进入产品化的阶段,系统对于车辆的控制权变得越来越大,越来越复杂。如果不能很好地协调好各个辅助驾驶系统,驾驶员就不能正确分析出车辆的运动状态,进而无法做出正确的操纵判断。因此,如何将多个辅助驾驶系统和驾驶员之间进行集成已经成为当前的一个研究热点。ADAS 系统本身就被定义为辅助驾驶系统,这就不可避免的需要考虑到和驾驶员行为之间的交互关系。如果辅助驾驶系统不考虑驾驶员的操纵行为反而会增加车辆行驶过程中的危险性。
驾驶行为特性研究
驾驶员在真实道路中的驾驶行为研究是人机共驾技术中十分重要的一部分,也是智能辅助系统的研究的基础。尽管真实道路试验具有成本高,数据量大,试验采集复杂等缺点,但是各国依然在这一方面做了大量的工作。美国国家高速公路交通安全局(NHTSA)投入100 辆汽车进行了驾驶员行为研究。他们采集了车辆状态信息,道路交通信息和在事故工况下以及濒临事故工况下的驾驶员行为信息。最终研究表明,注意力分散是事故发生的根源。日本新能源和工业技术发展组织(NEDO)利用三年的时间收集了正常工况下真实环境下驾驶员行为数据。欧洲 EURO-FOT 和 PROLPGUE 项目收集了数量十分可观的驾驶员信息。其中,EURO-FOT 主要关注于驾驶员信息在 ADAS 系统中的应用部分。
计算机图形学和计算性能的发展使得道路结构和交通车行为的虚拟建模成为可能,这就使得驾驶模拟器可以模拟更为广泛的道路和交通状况。再加上处理器处理能力的发展和成本的下降,驾驶模拟器再次成为驾驶员行为特性研究的有力工具。和真实道路试验相比,驾驶模拟器具有可重复性好,工况设定更为灵活,耗时少,效率高,风险低等优点。尽管驾驶模拟器现在被广泛的应用于驾驶员特性研究中,但是对于通过驾驶模拟器获得的驾驶员特性数据和真实道路试验获得的驾驶员特性数据相比,其可靠性仍然需要进一步的验证。一个高质量的研究项目仍然需要平衡好驾驶模拟器实验数据和真实道路试验数据之间的关系。
人机交互系统的发展趋势
通过对目前人机交互系统的研究现状的分析,未来有关人机界面,人机交互和人机共驾可能的发展趋势包括:
在人机交互设计过程中,需要考虑不同人群的需求,这也是未来HMI 设计标准和准则的制定方向。
车辆中和驾驶员操纵输入密切相关的部分,如转向盘力感,踏板脚杆,座椅舒适度,体感等,依然会是未来的研究方向之一。更适合驾驶员的操纵输入和身体感知将是一个需要持续努力的研究方向。
对于 ADAS 系统,驾驶员在获得辅助驾驶的同时,也会分散注意力增加驾驶负担,这是 ADAS 系统面临的一个重要问题。如何协调好驾驶员基本操纵行为和辅助驾驶系统之间的关系需进一步研究。
未来车辆以及交通领域不仅仅是驾驶员和车之间关系的研究,这一领域所面临的问题可能会是更为广泛的社会问题,需要更多领域的研究人员参与进来,如城市规划师,社会学家,人类学家等。
目前各国虽然都获得大量的驾驶员行为信息的数据库,但是如何将这些数据应用于工程系统中仍有待研究。
参考文献:
中国人工智能系列白皮书-智能驾驶 2017
请登录专知,获取更多AI知识资料,PC登录www.zhuanzhi.ai或者点击阅读原文,注册登录,顶端搜索主题,查看获得对应主题知识等资料!如下图所示~

请扫描专知小助手,加入专知主题群(请备注主题类型:AI、NLP、CV、 KG等,或者加小助手咨询入群)交流~

专知荟萃知识资料全集获取(关注本公众号-专知,获取下载链接),请查看:
【专知荟萃01】深度学习知识资料大全集(入门/进阶/论文/代码/数据/综述/领域专家等)(附pdf下载)
【专知荟萃02】自然语言处理NLP知识资料大全集(入门/进阶/论文/Toolkit/数据/综述/专家等)(附pdf下载)
【专知荟萃03】知识图谱KG知识资料全集(入门/进阶/论文/代码/数据/综述/专家等)(附pdf下载)
【专知荟萃04】自动问答QA知识资料全集(入门/进阶/论文/代码/数据/综述/专家等)(附pdf下载)
【专知荟萃05】聊天机器人Chatbot知识资料全集(入门/进阶/论文/软件/数据/专家等)(附pdf下载)
【专知荟萃06】计算机视觉CV知识资料大全集(入门/进阶/论文/课程/会议/专家等)(附pdf下载)
更多请点击查看:【专知荟萃集合】人工智能领域主题知识资料全集[ 持续更新中](入门/进阶/论文/综述/视频/专家等,附查看)
-END-
欢迎使用专知
专知,一个新的认知方式! 专注在人工智能领域为AI从业者提供专业可信的知识分发服务, 包括主题定制、主题链路、搜索发现等服务,帮你又好又快找到所需知识。
使用方法>>访问www.zhuanzhi.ai, 或点击文章下方“阅读原文”即可访问专知
中国科学院自动化研究所专知团队
@2017 专知
专 · 知
关注我们的公众号,获取最新关于专知以及人工智能的资讯、技术、算法、深度干货等内容。扫一扫下方关注我们的微信公众号。


点击“阅读原文”,使用专知!
展开全文



