【KDD2018】143页 MIT自动驾驶算法地图推理教程
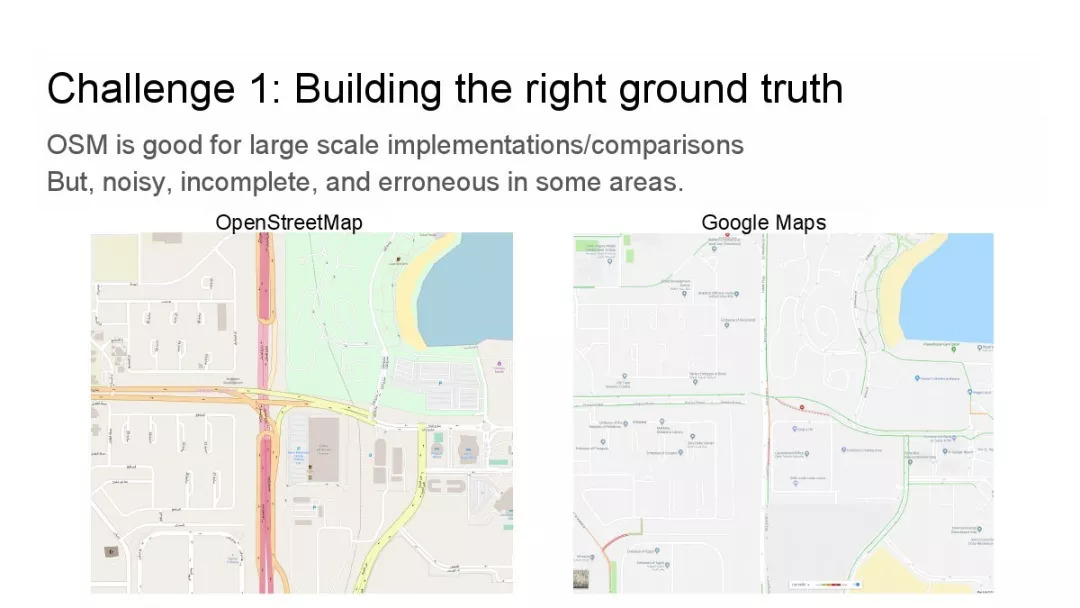
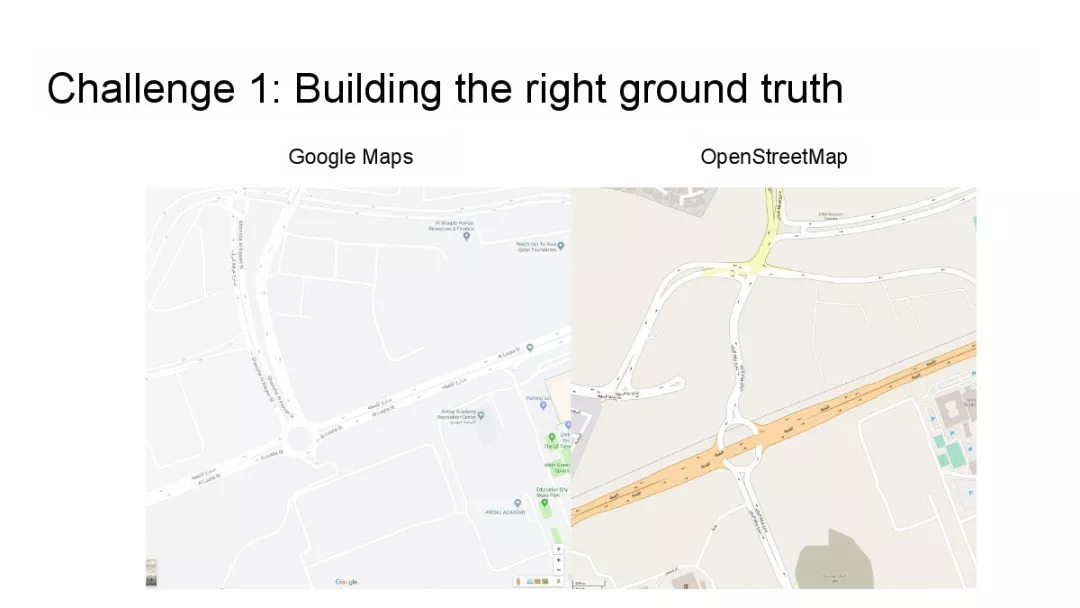
【导读】自动驾驶车辆成为“主流”的必要条件是高度准确和可更新的地理道路网络地图。最近宣布了汽车制造商和技术公司的几项大型商业地图制作工作。构建最准确地图是一个社会问题,在不久的将来,最准确的地图可能不是公共产品,而是私人利益相关者的财产。需要齐心协力才能使地图制作民主化,以及像OpenStreetMap(OSM)这样的协作努力社区的力量汇集起来创建和维护地图作为公共产品。
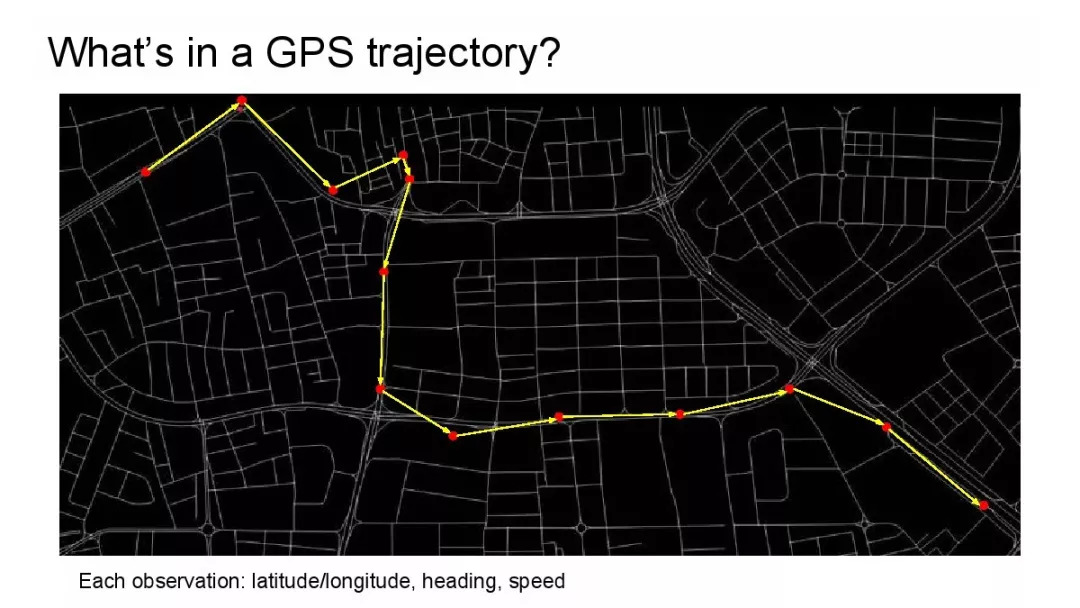
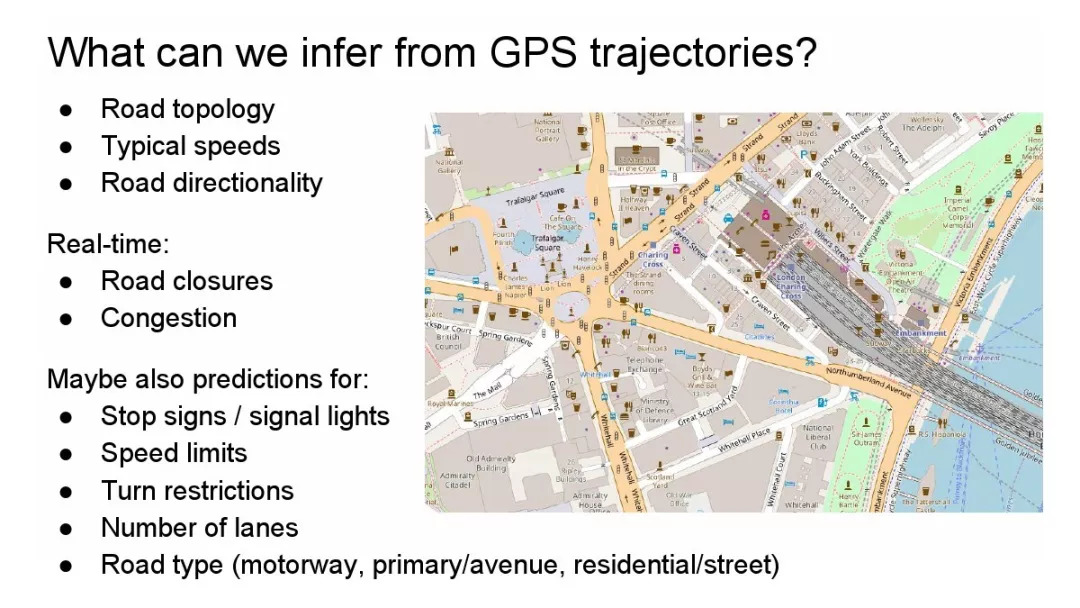
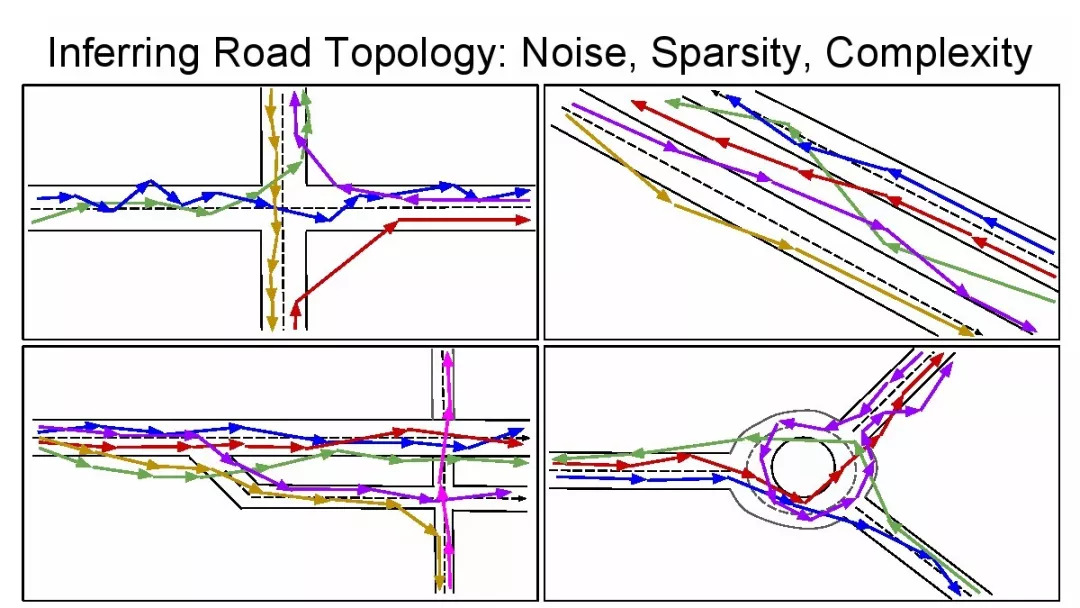
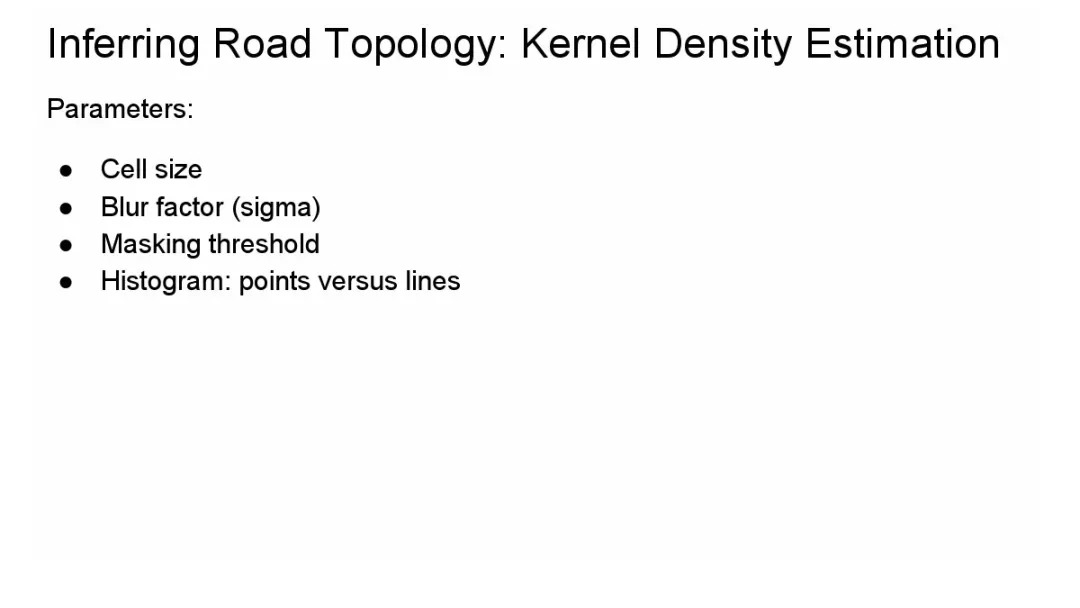
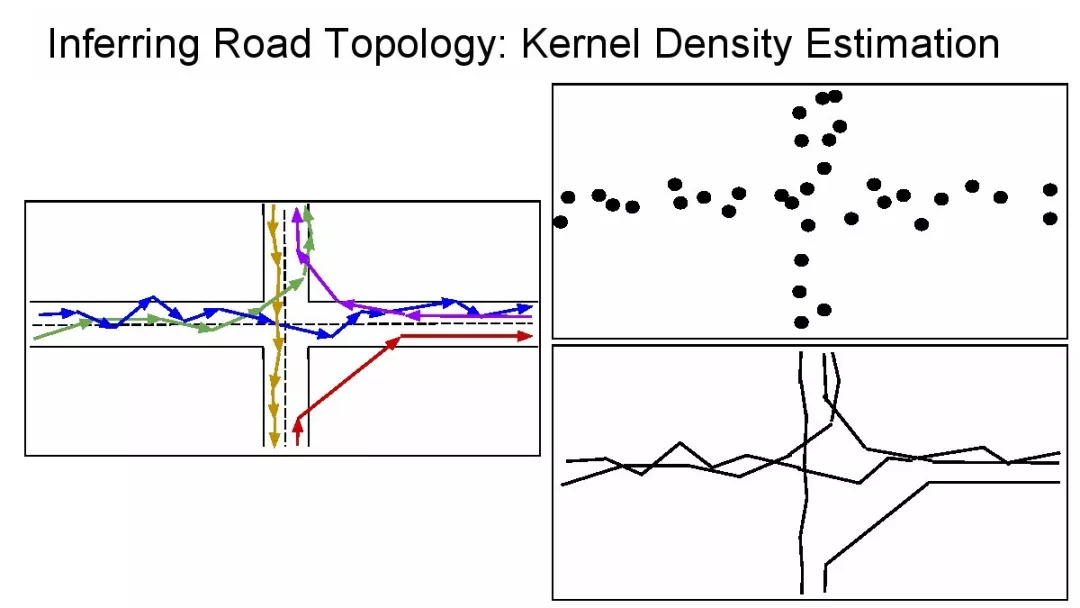
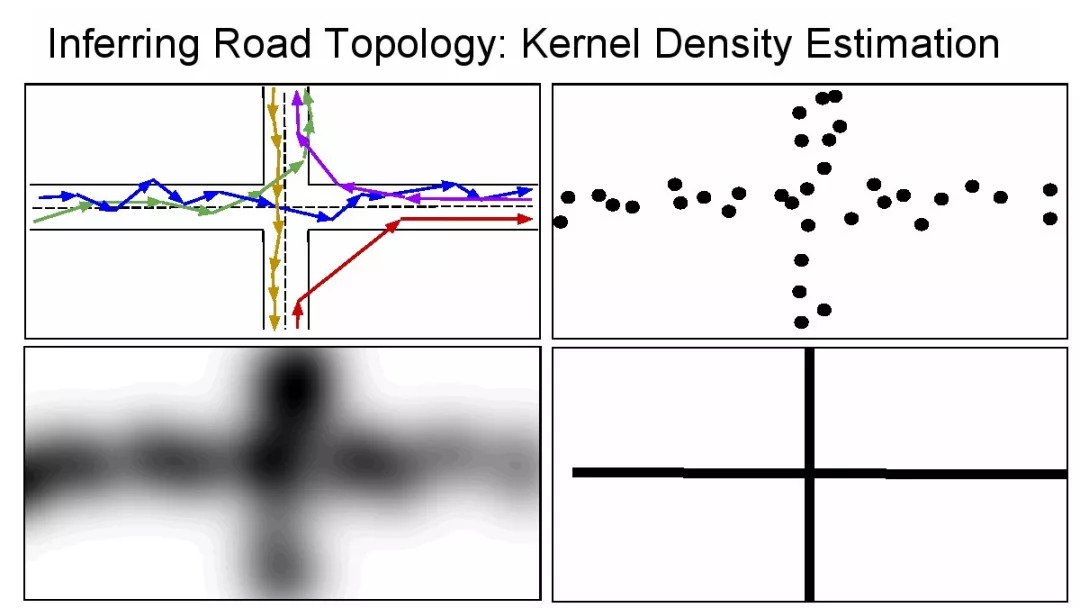
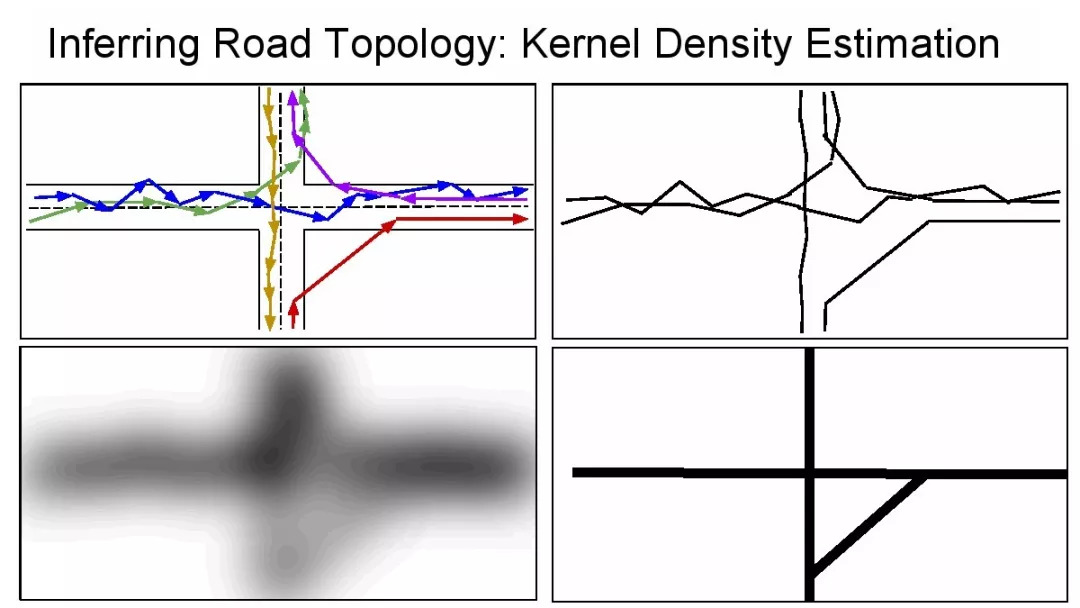
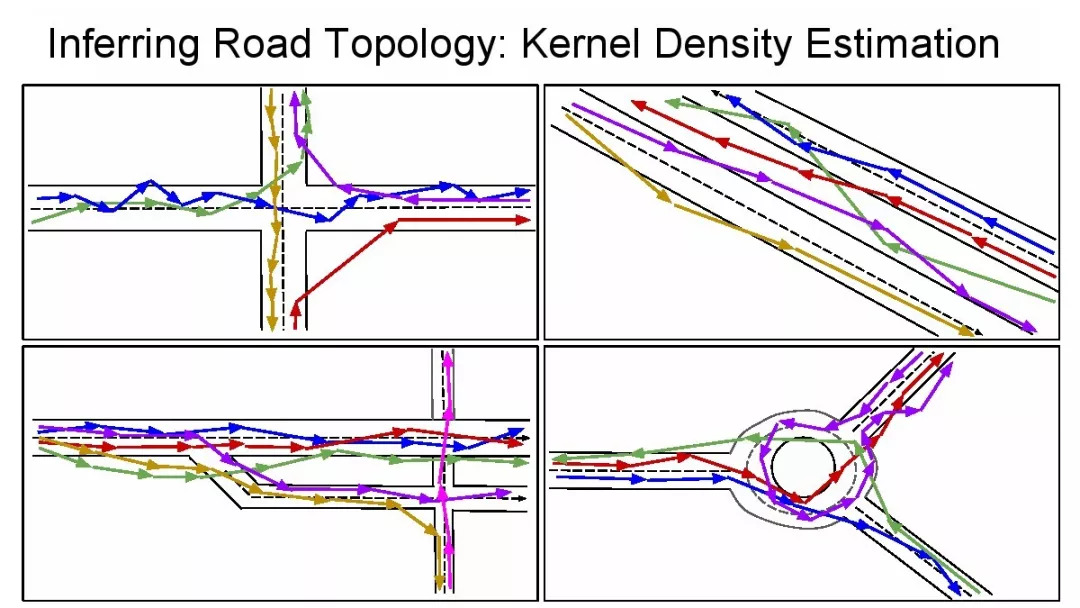
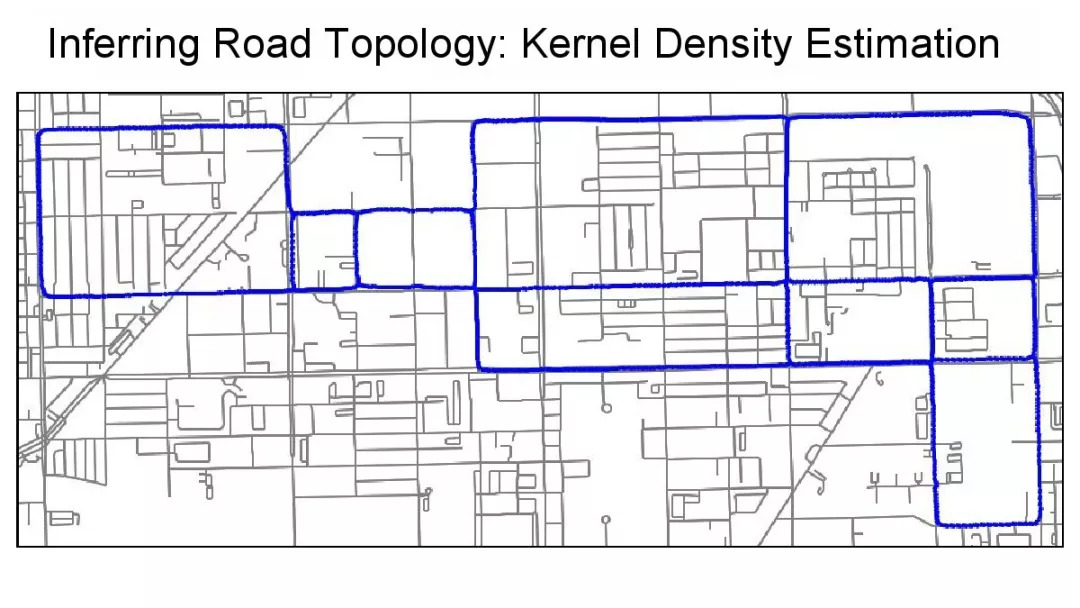
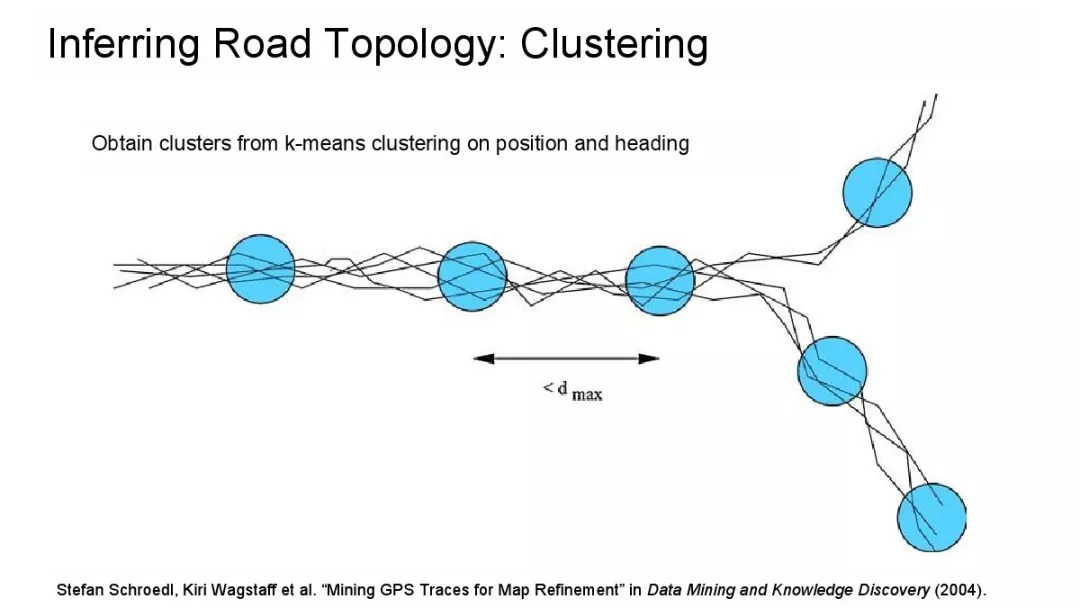
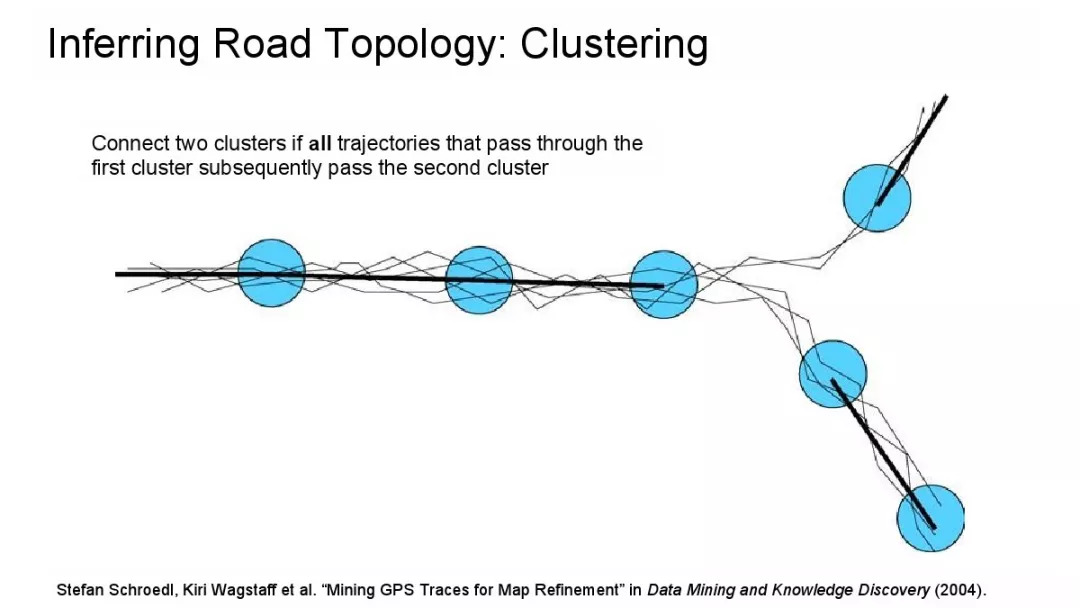
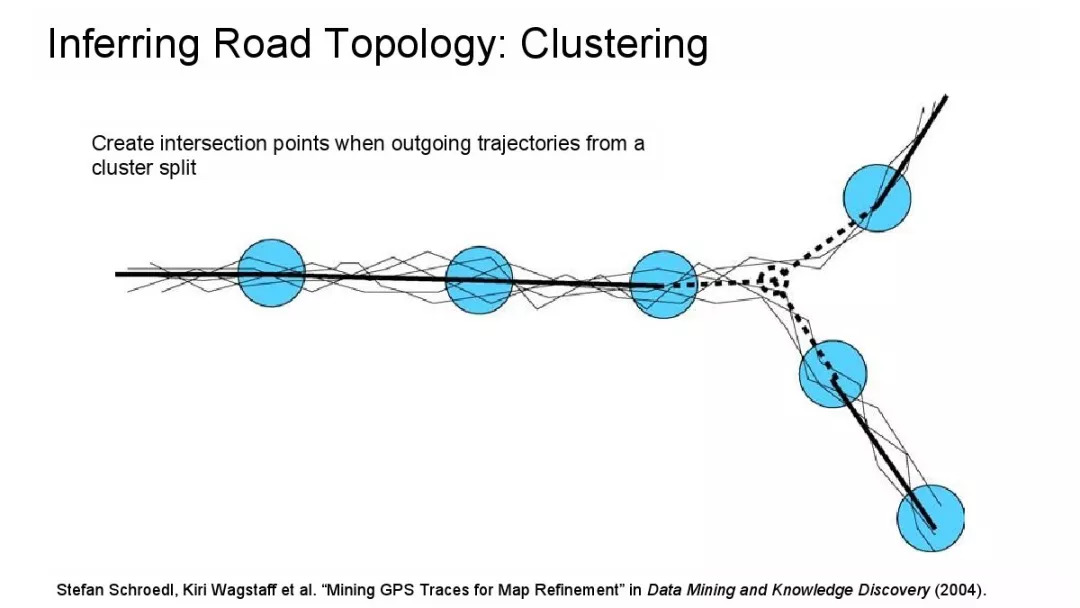
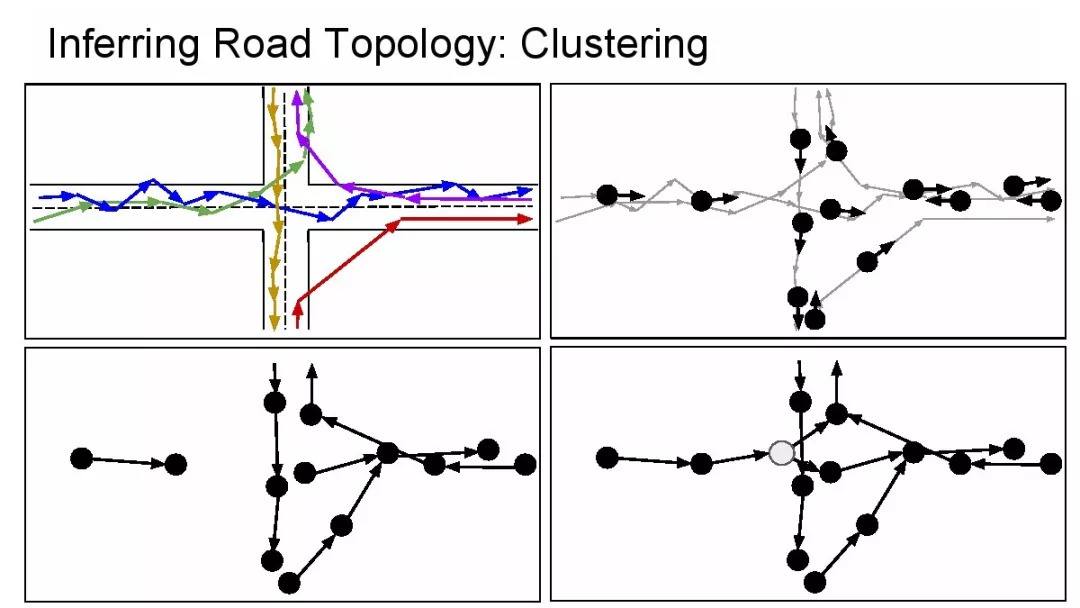
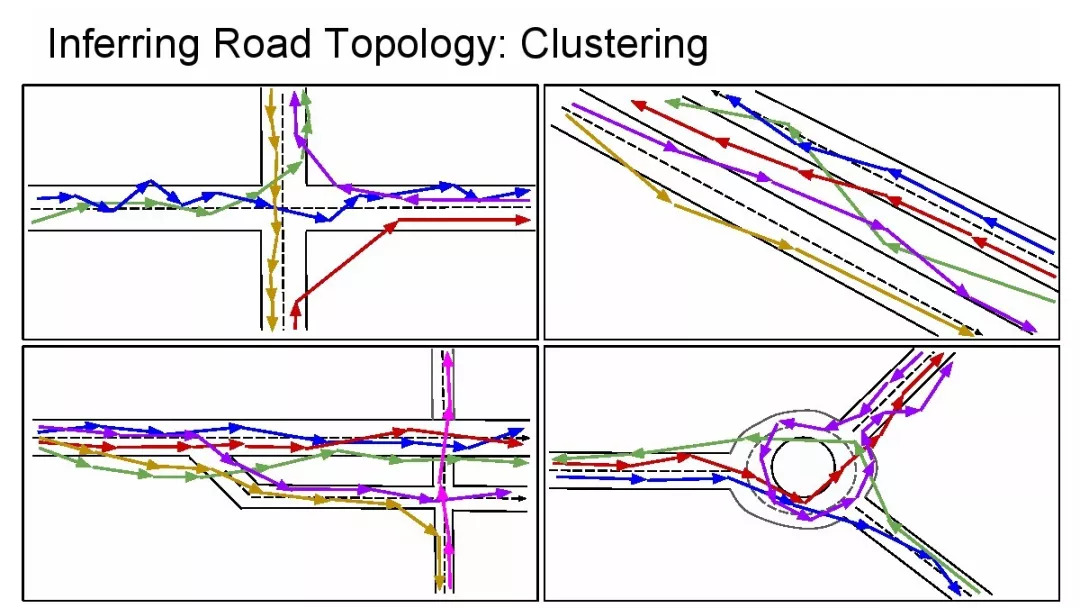
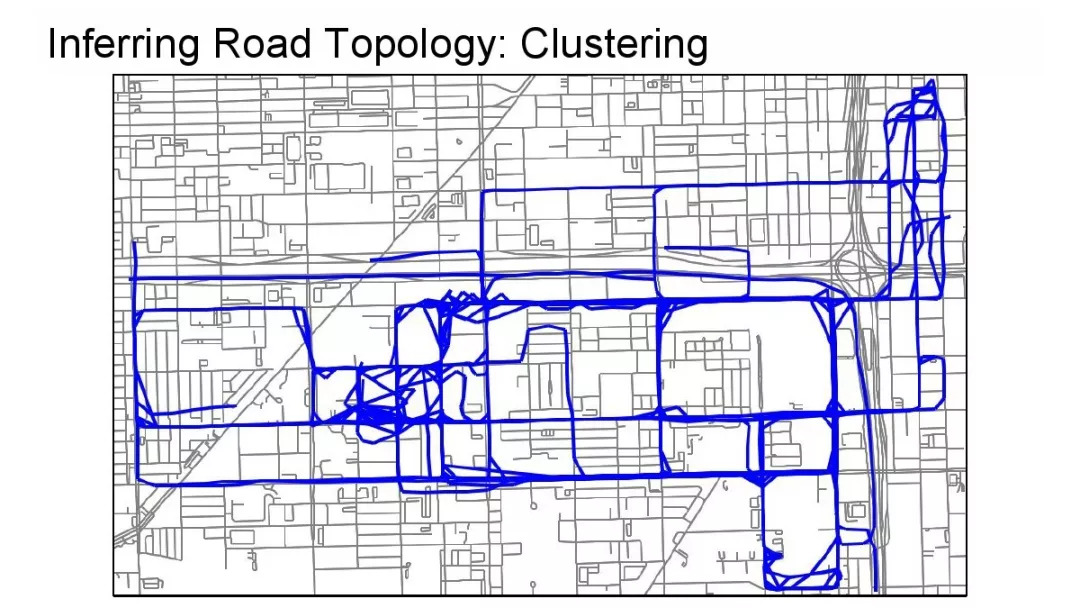
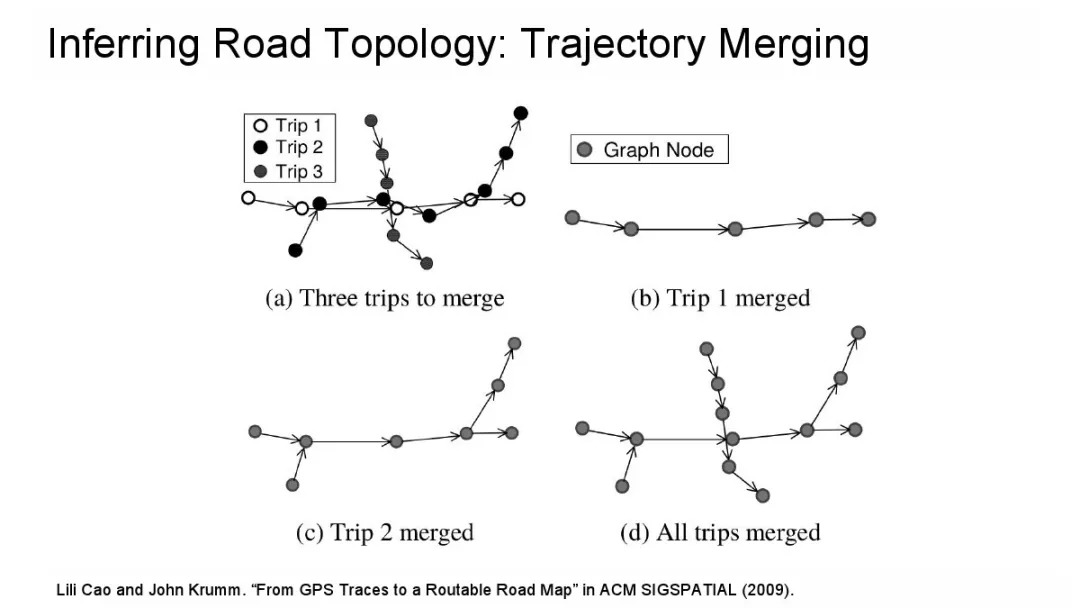
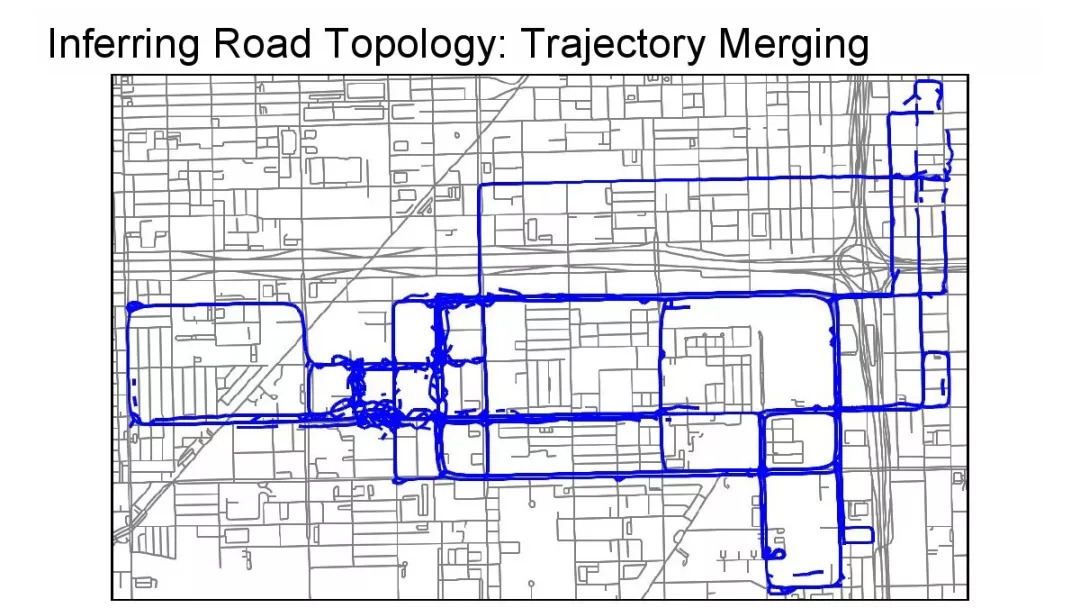
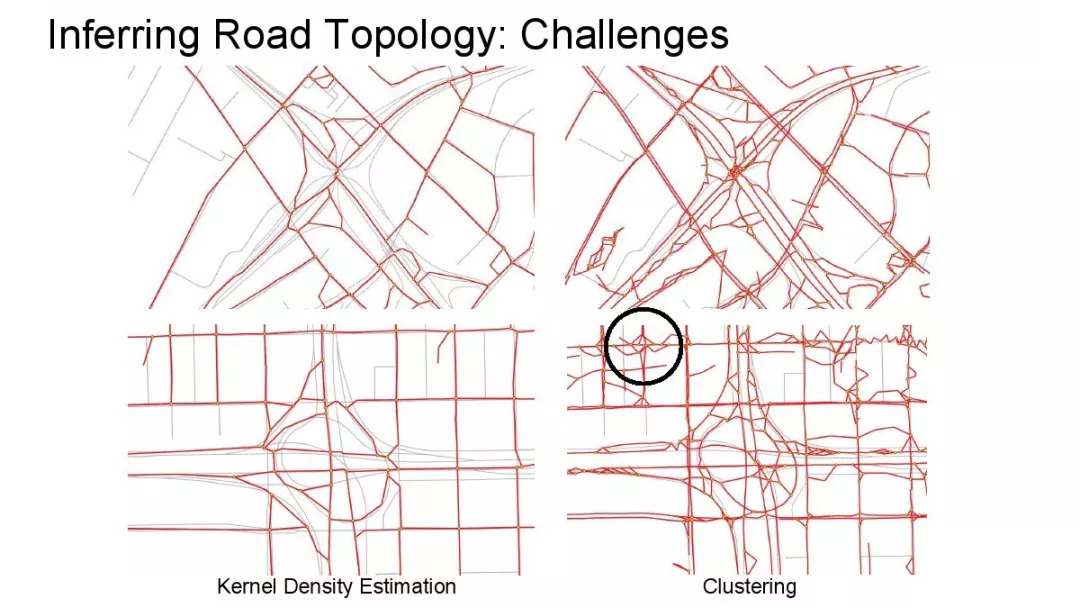
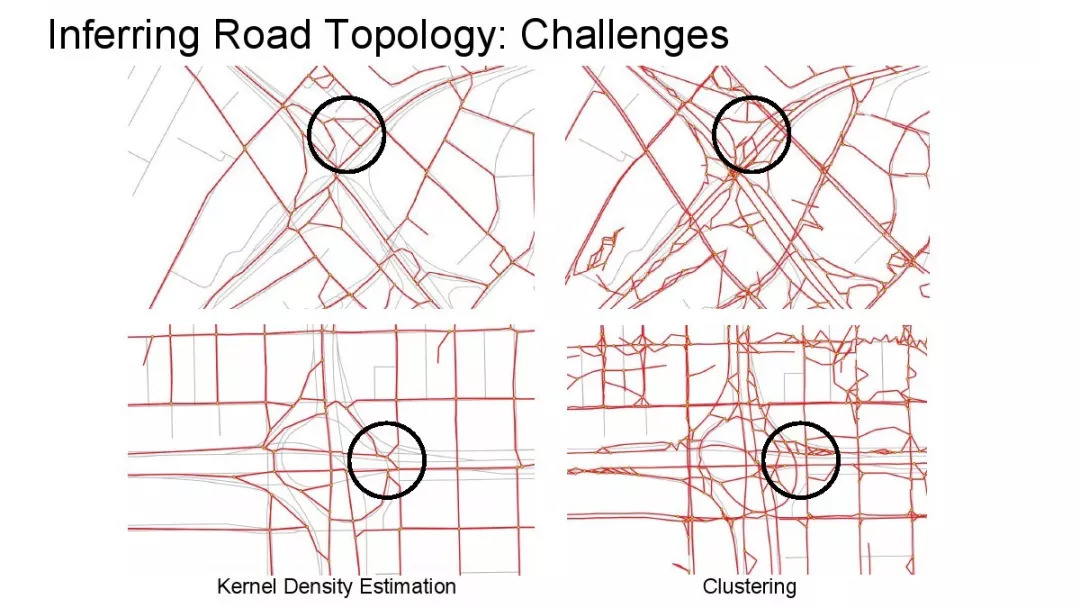
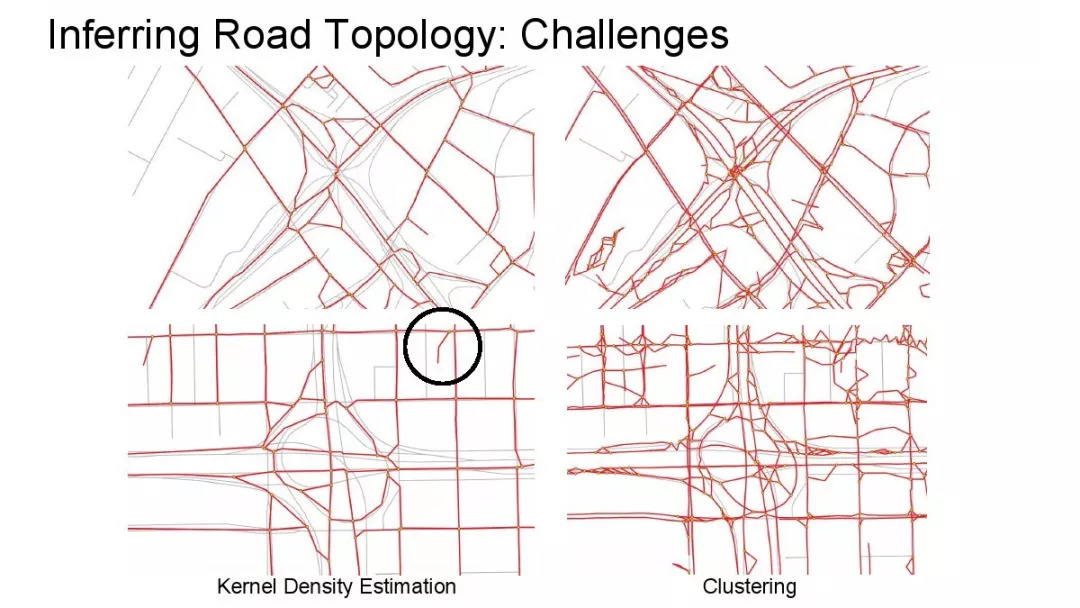
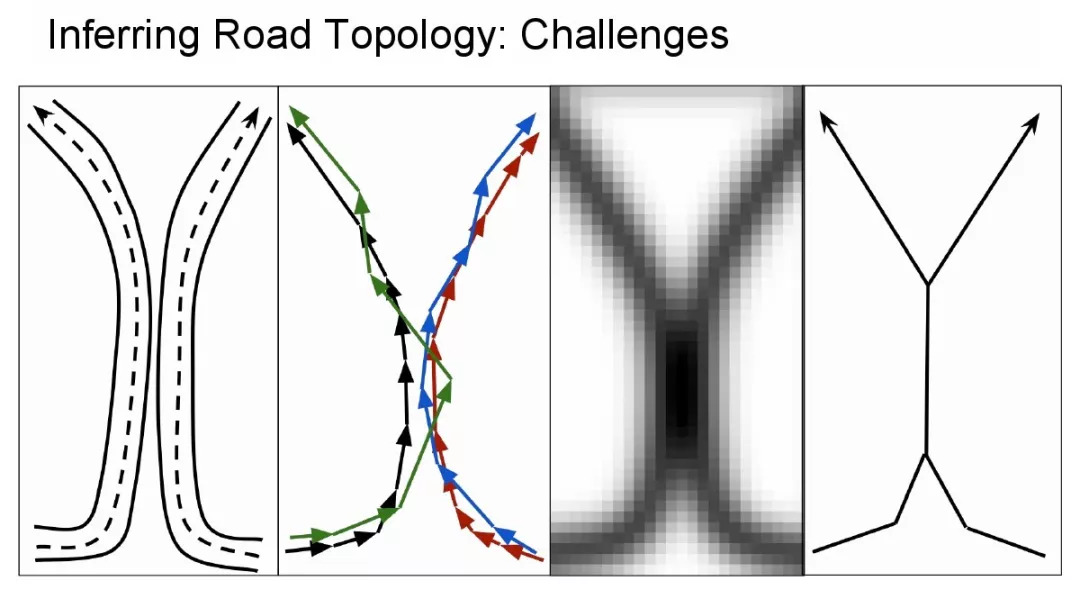
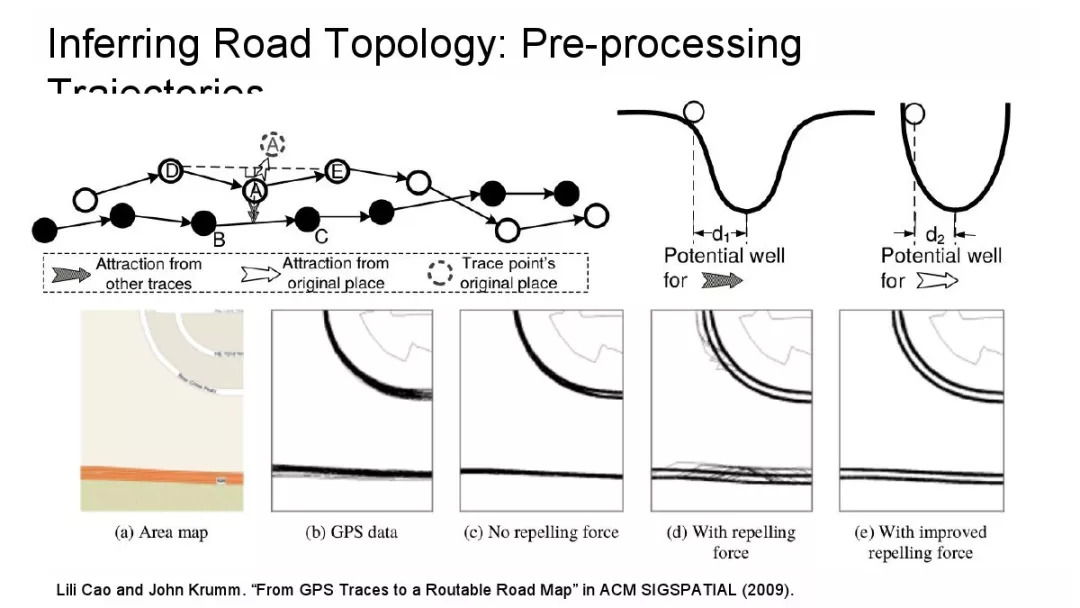
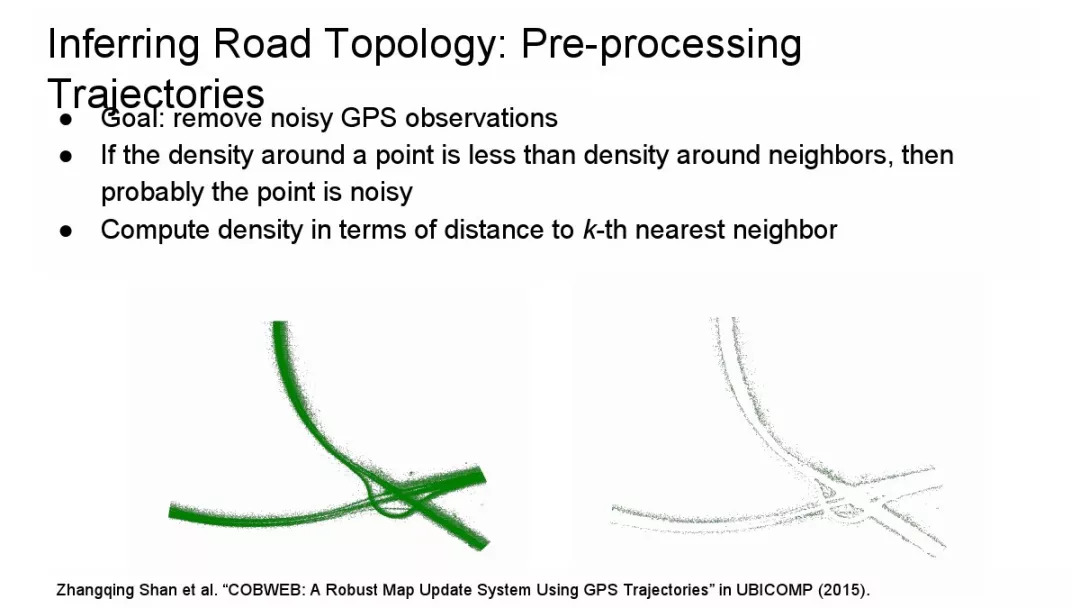
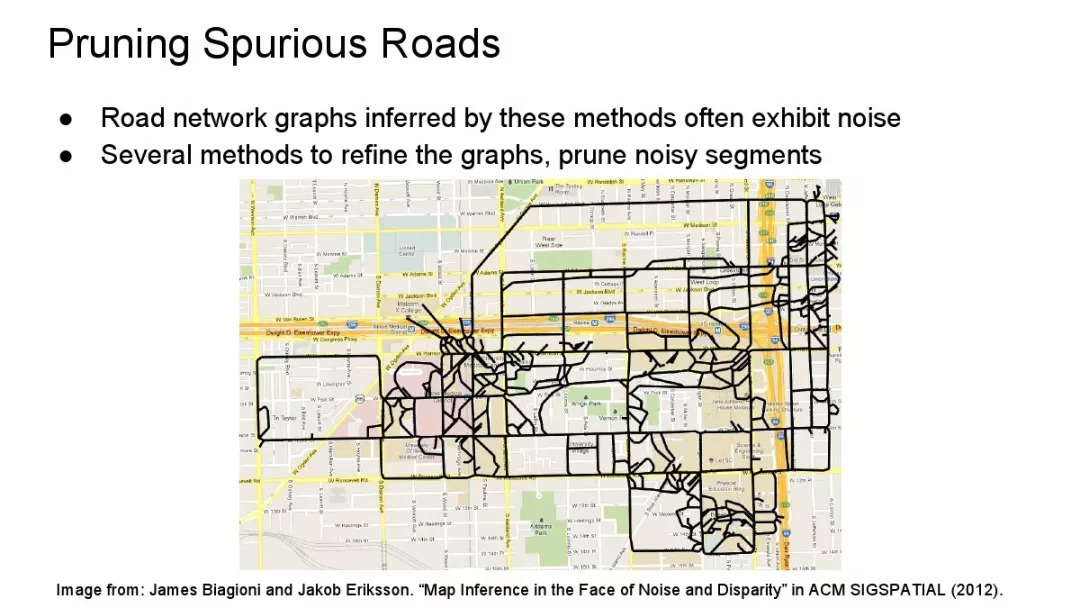
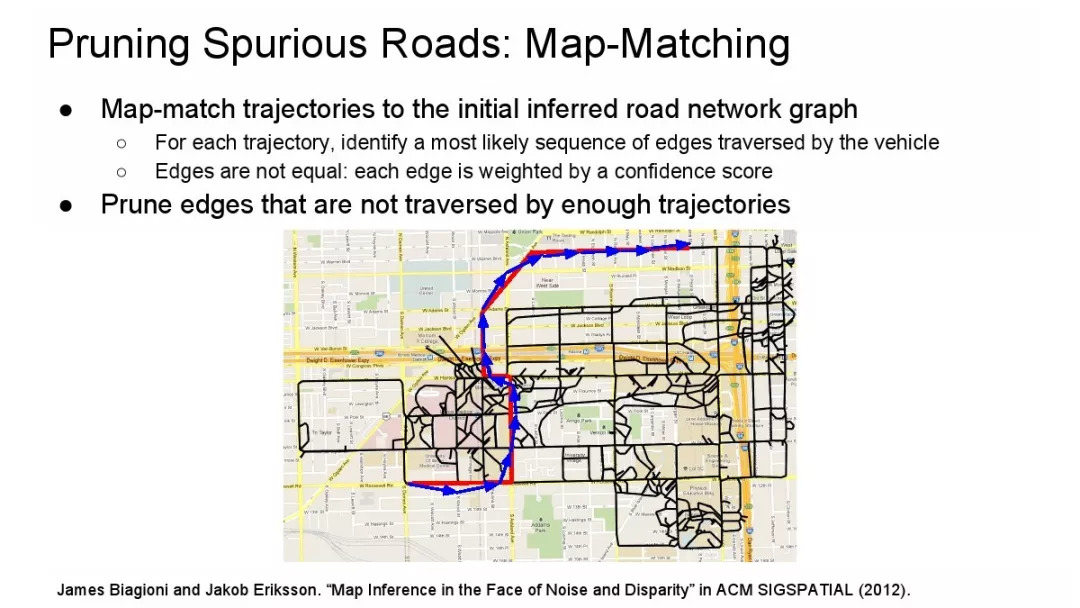
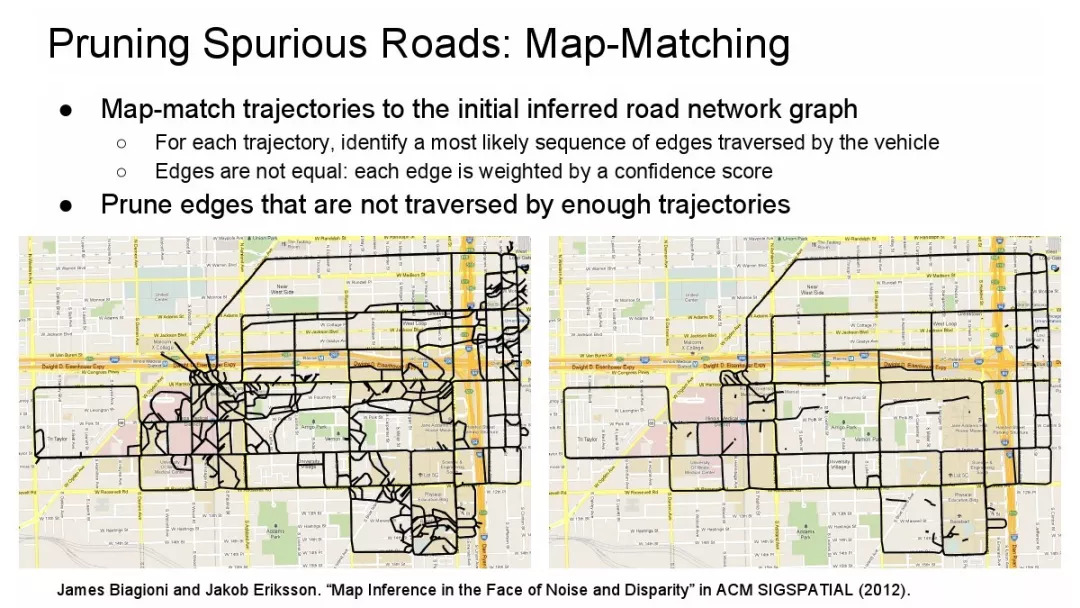
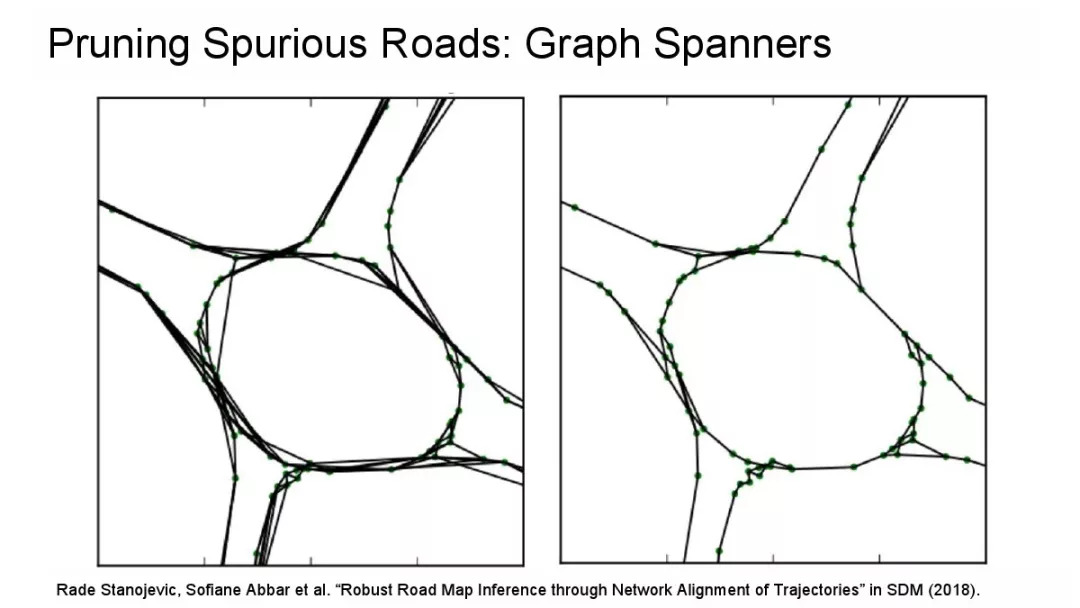
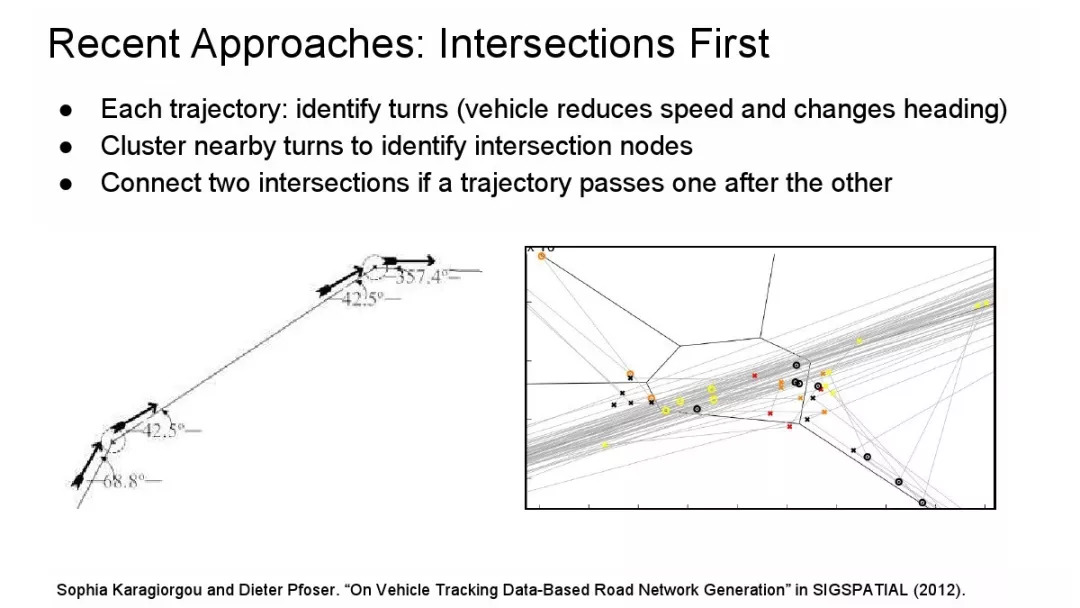
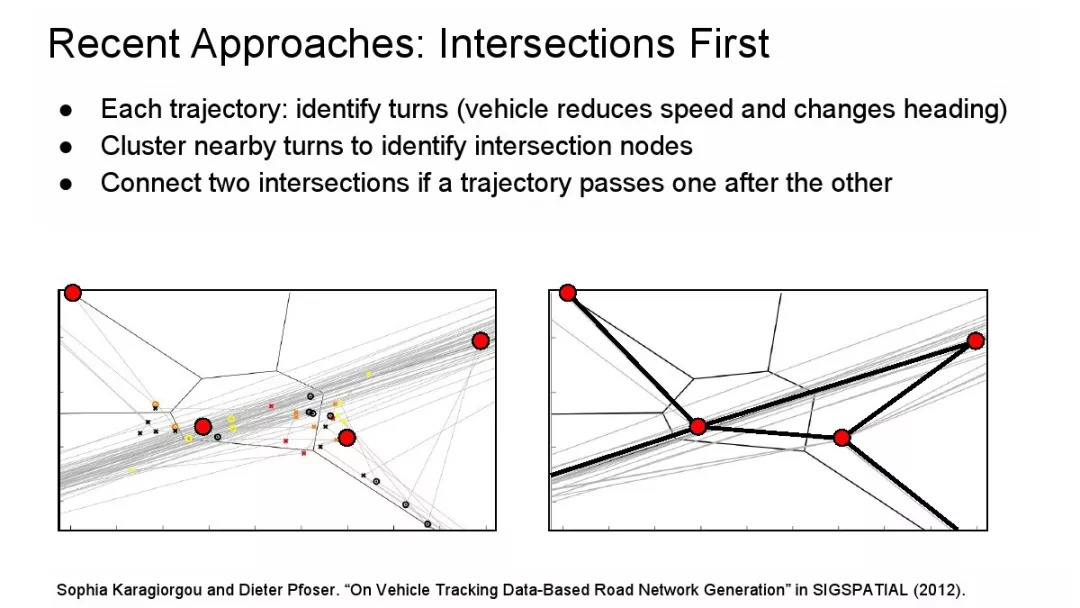
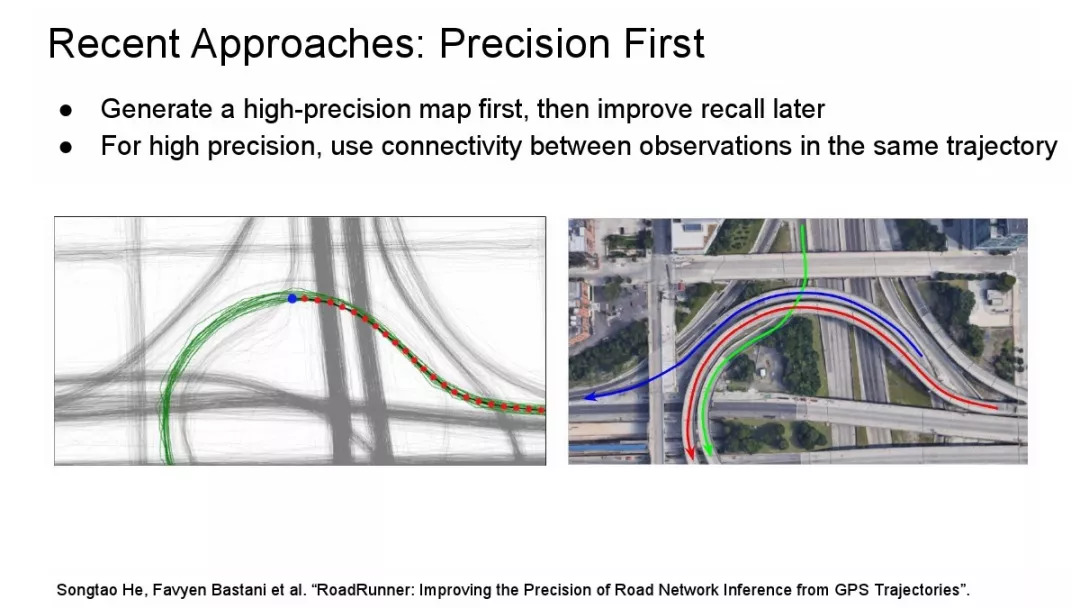
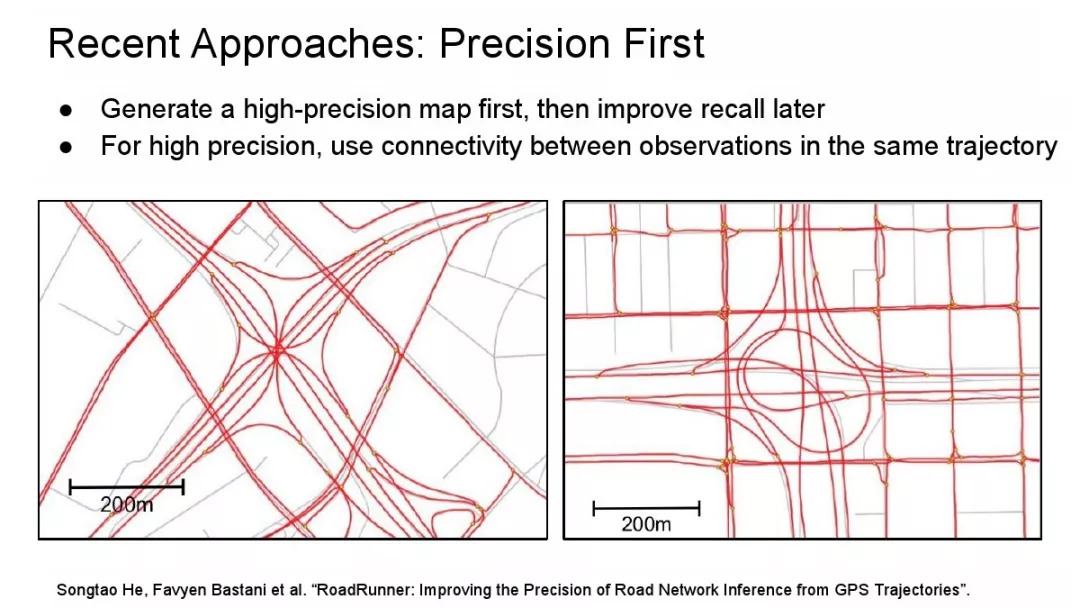
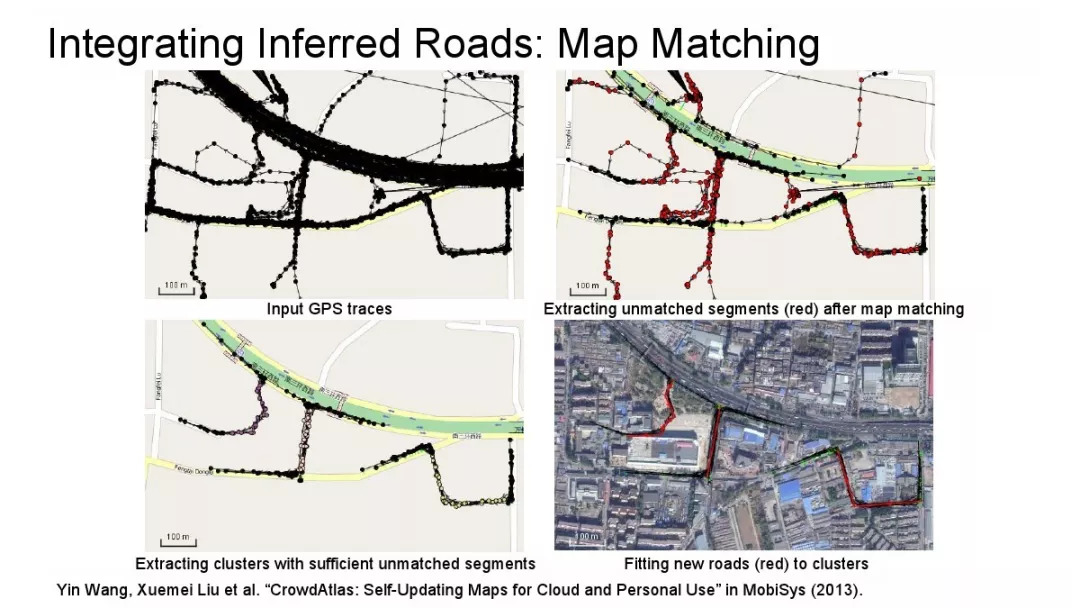
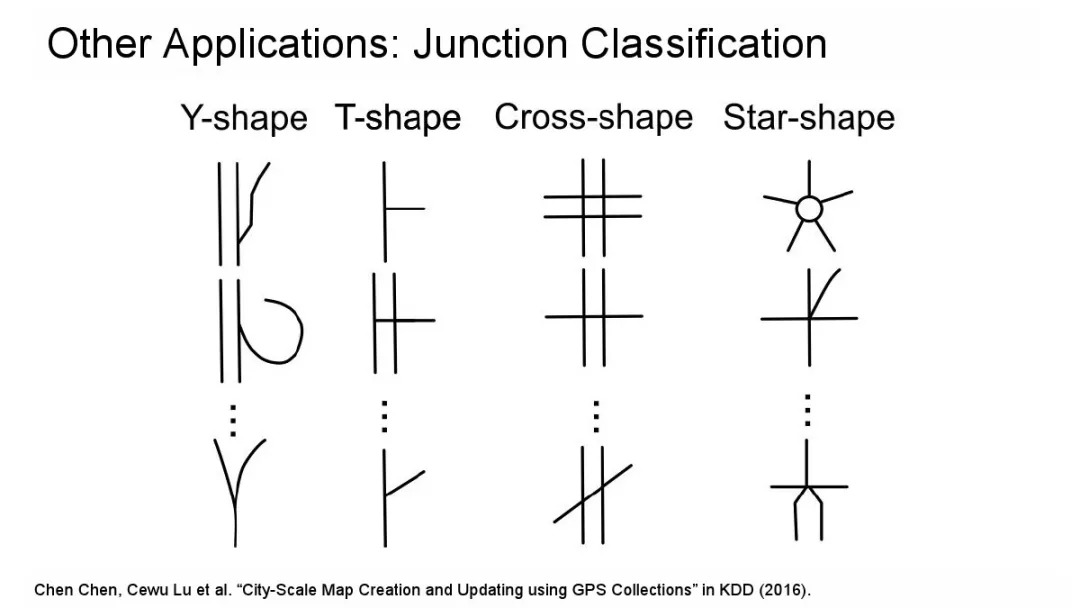
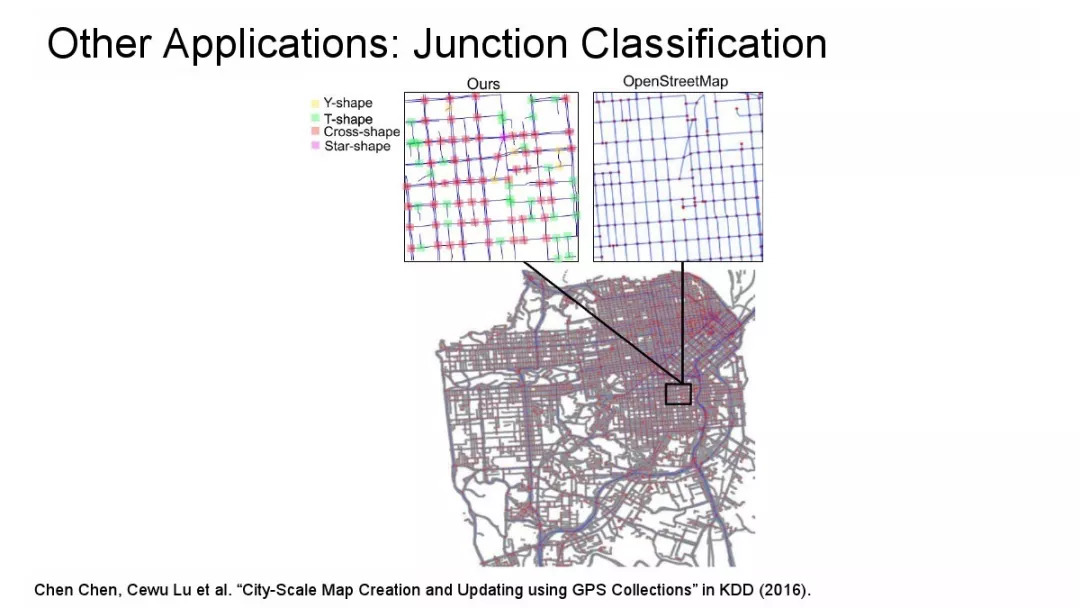
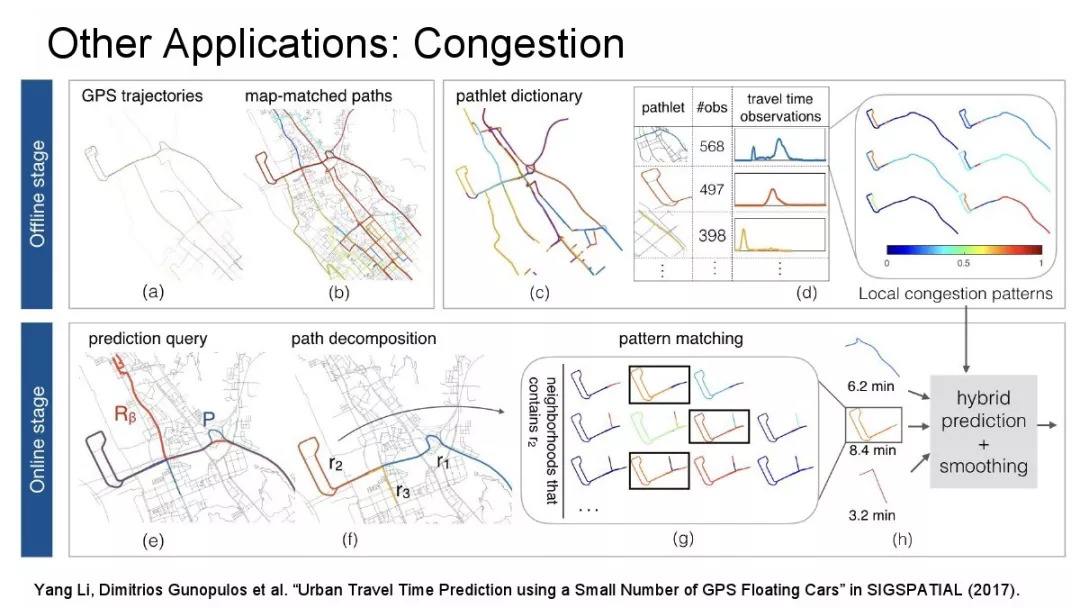
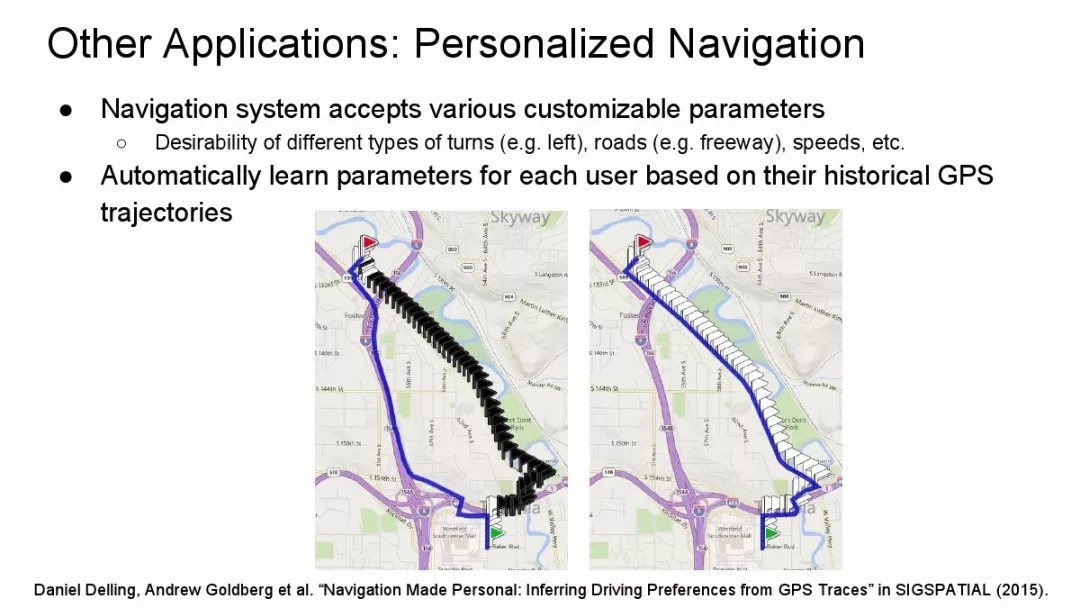
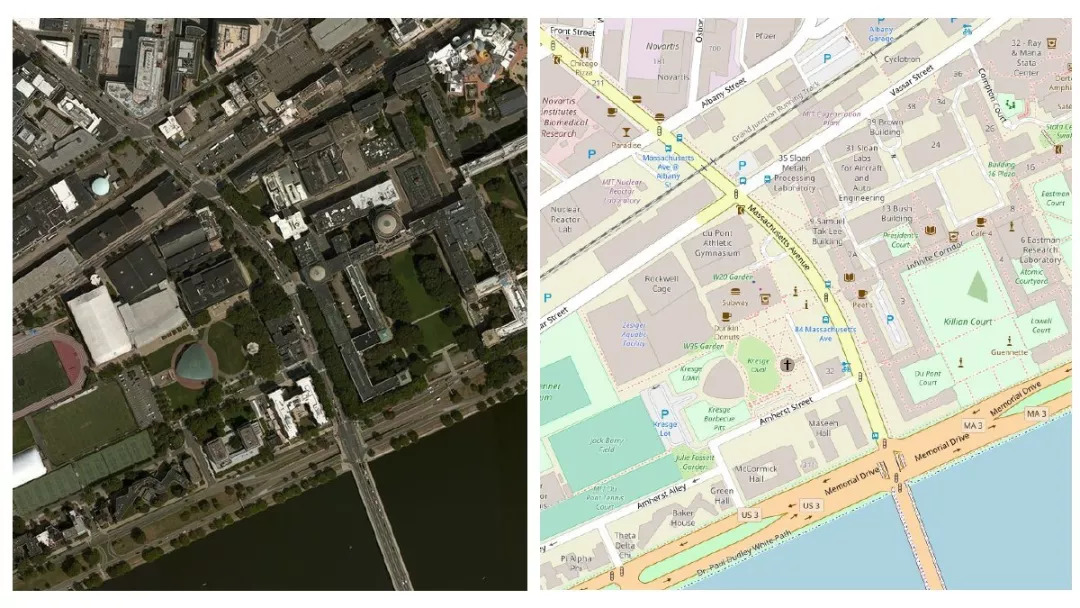
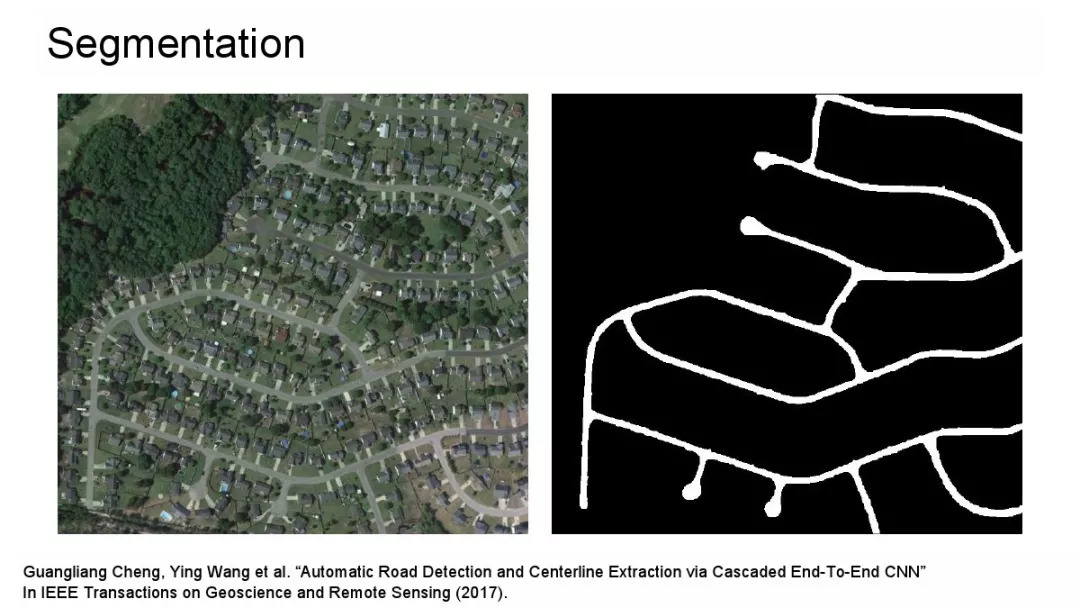
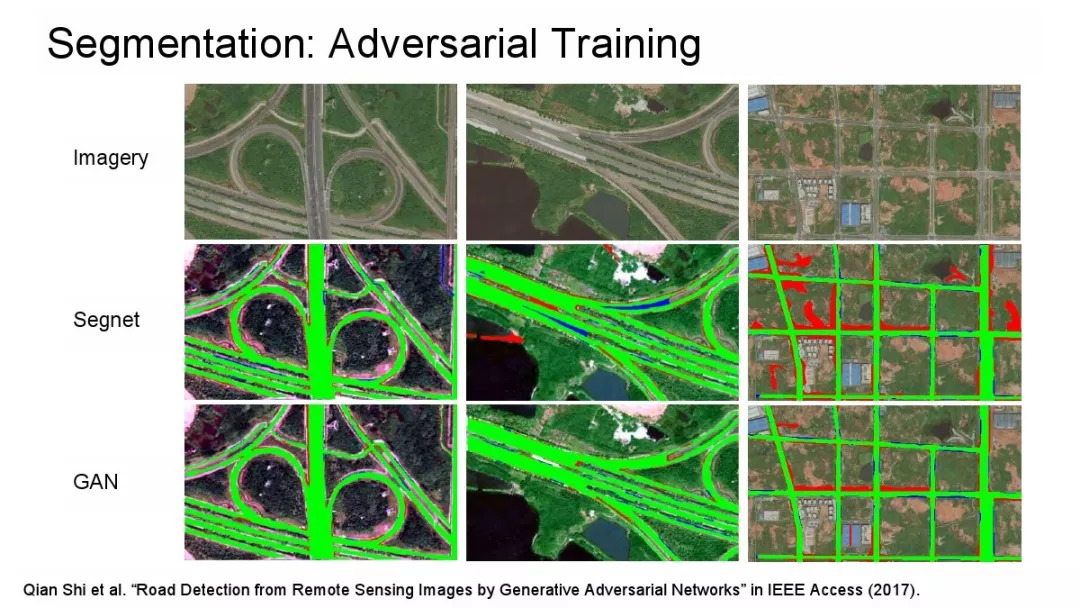
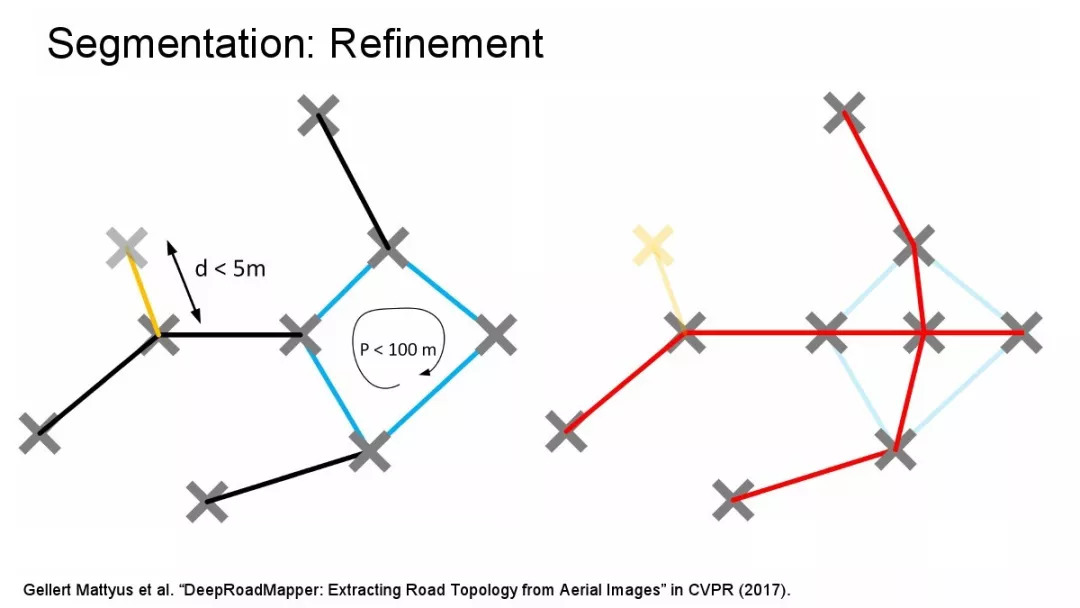
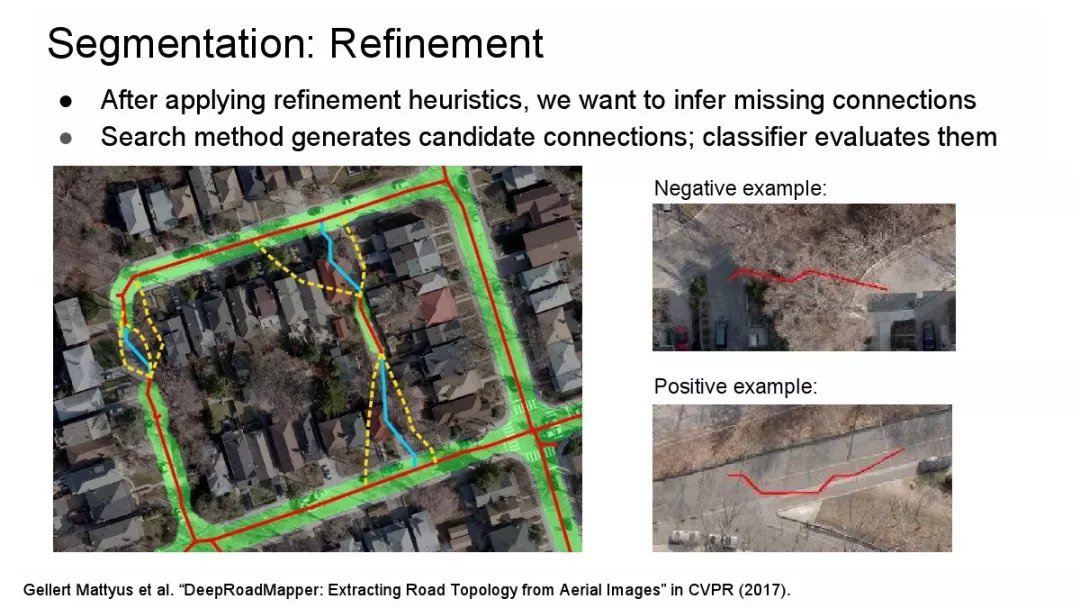
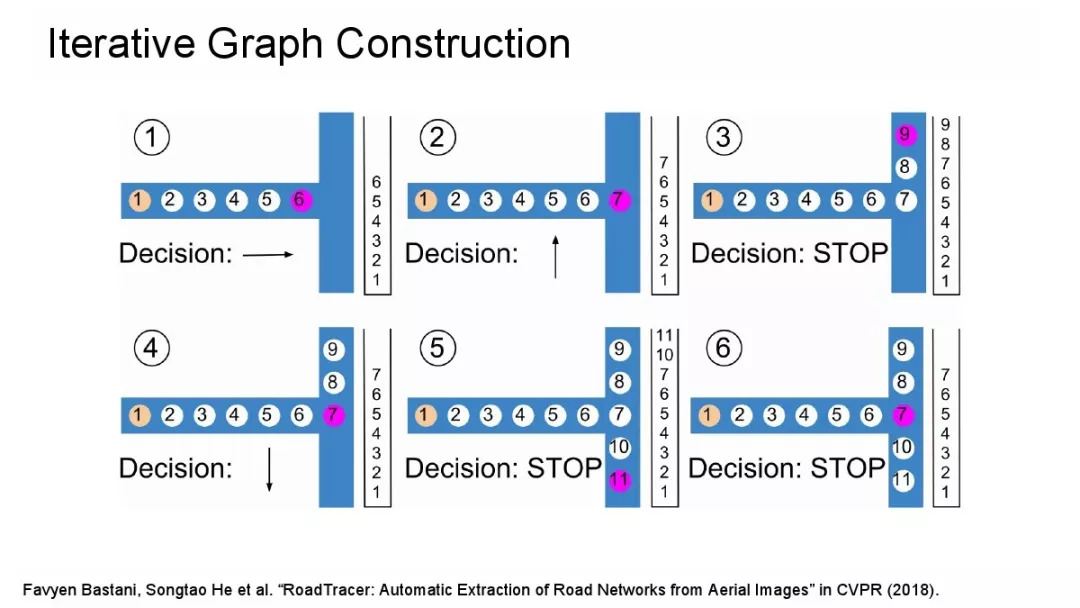
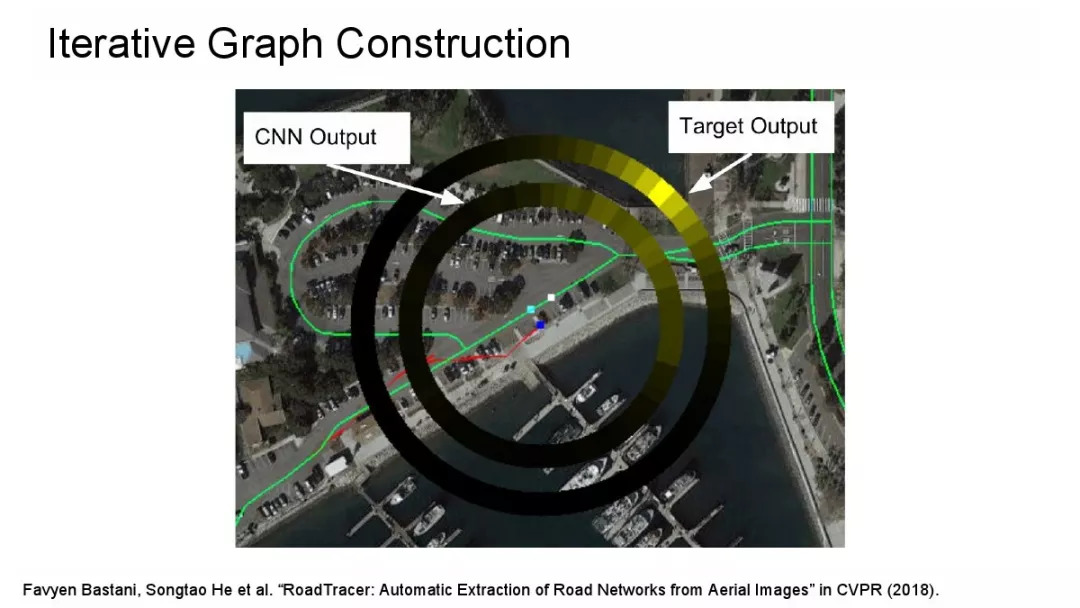
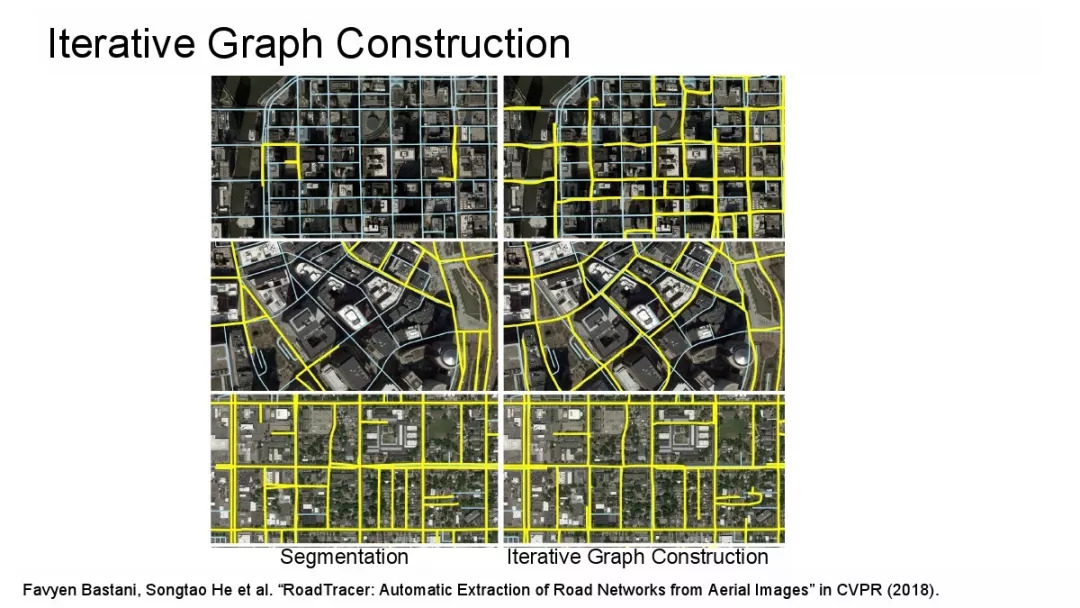
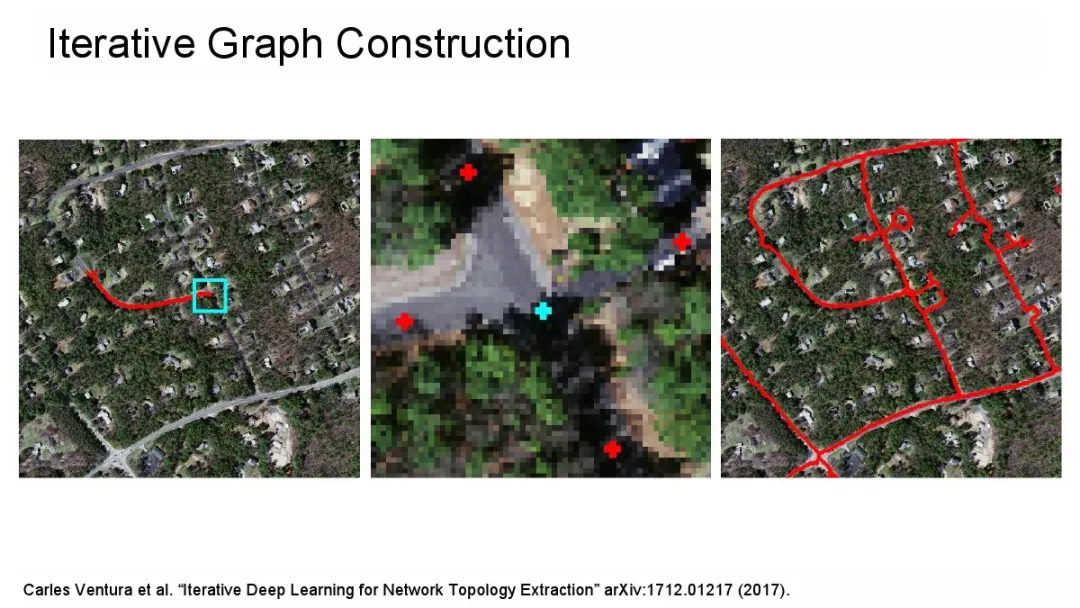
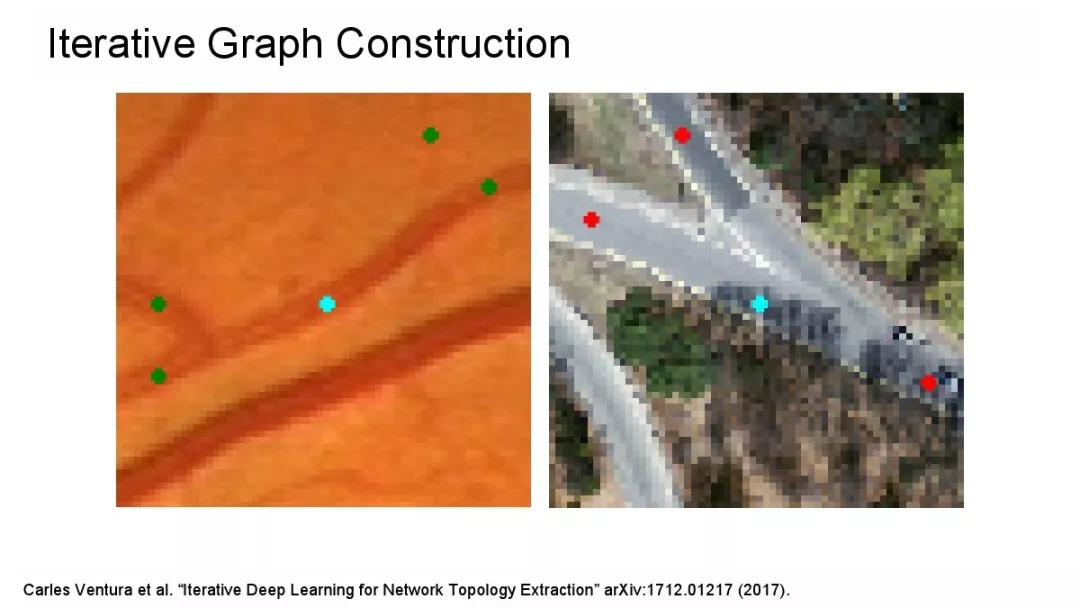
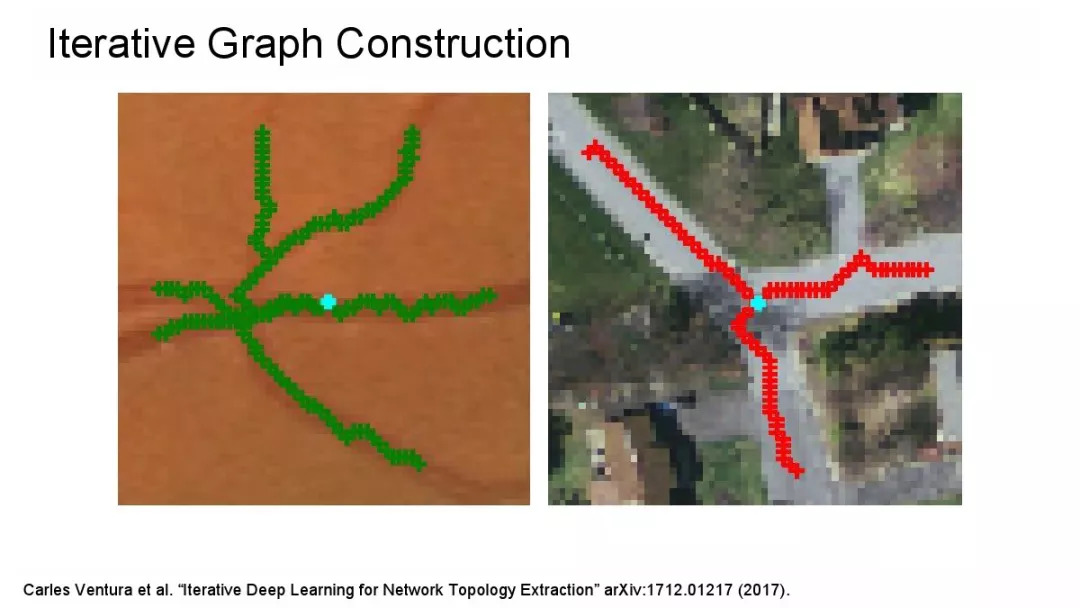
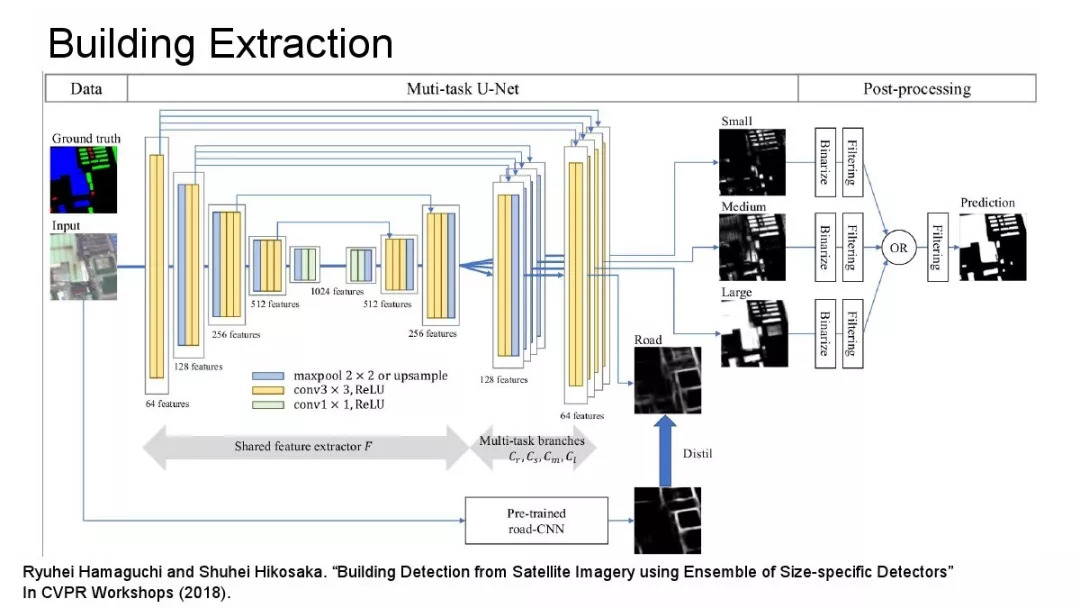
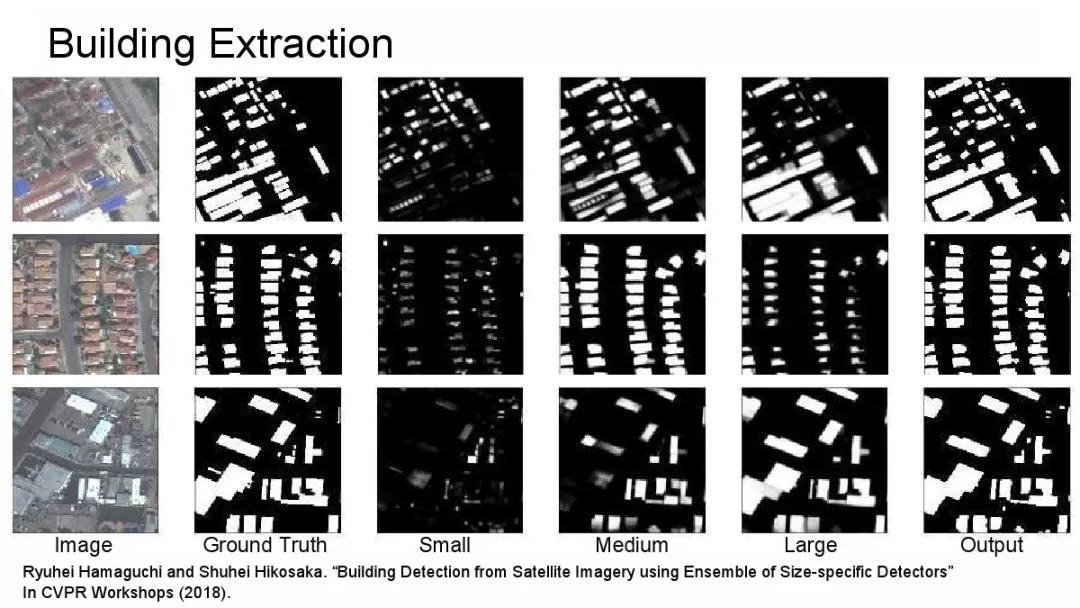
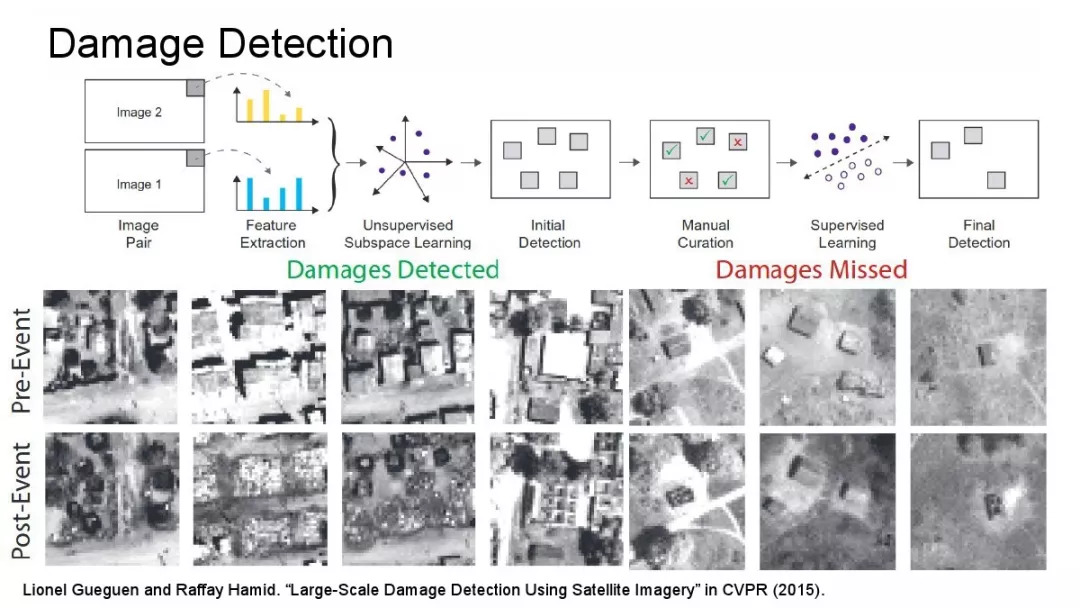
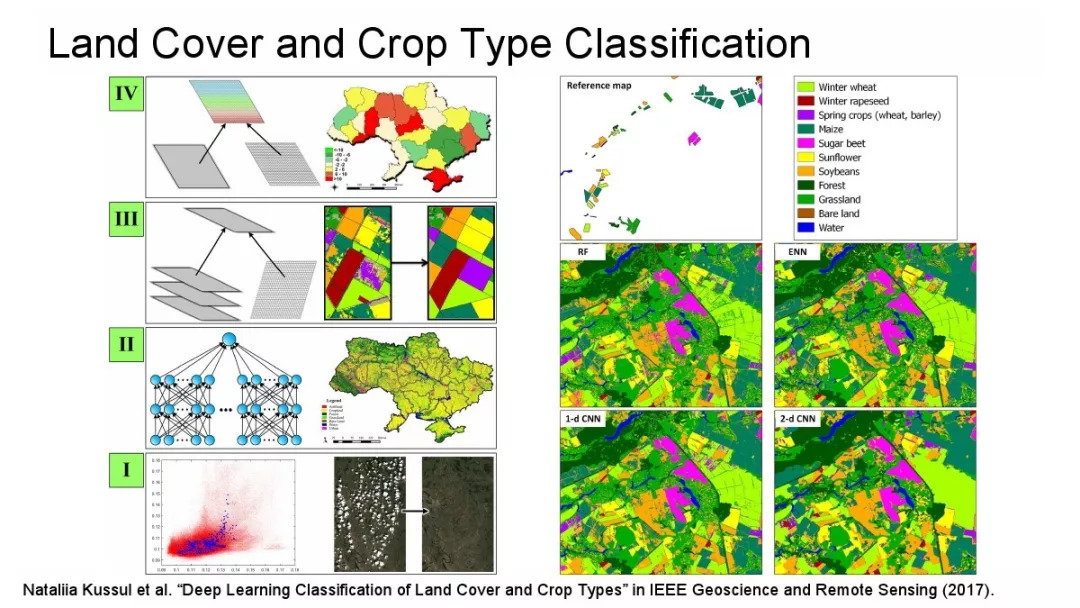
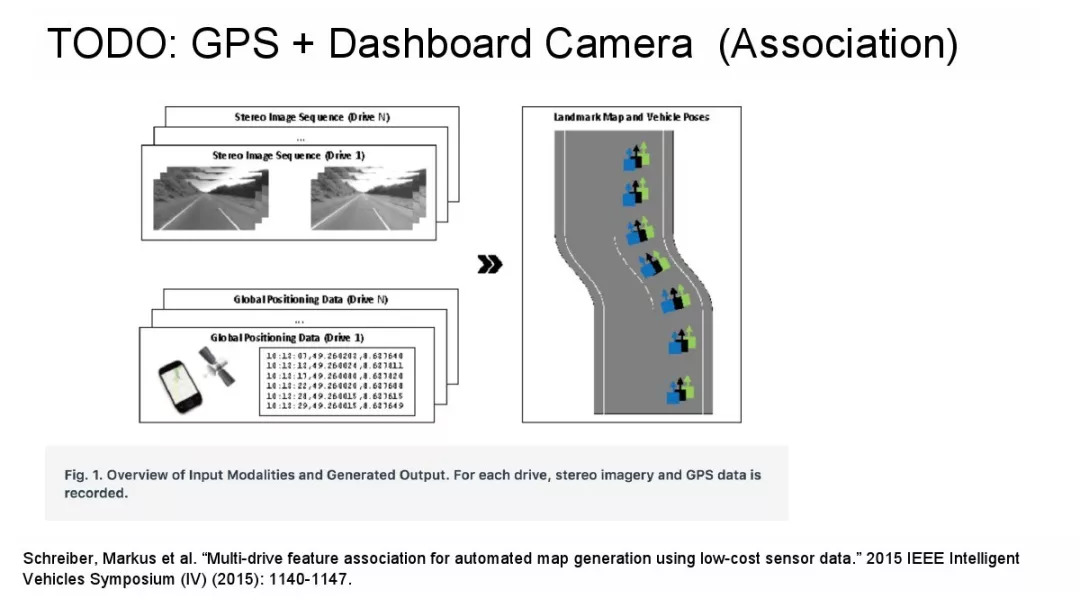
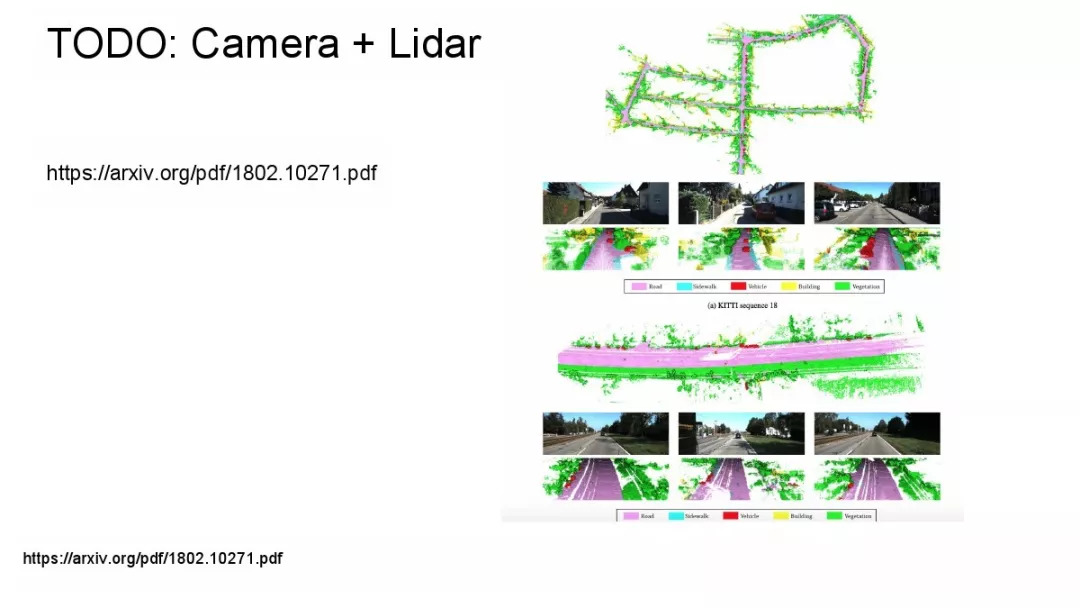
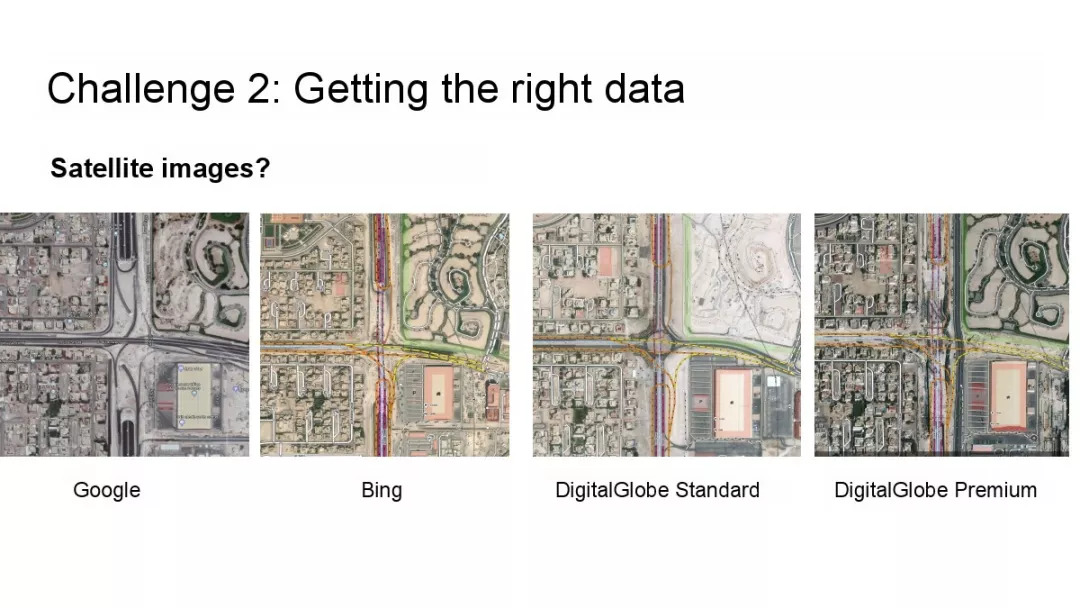
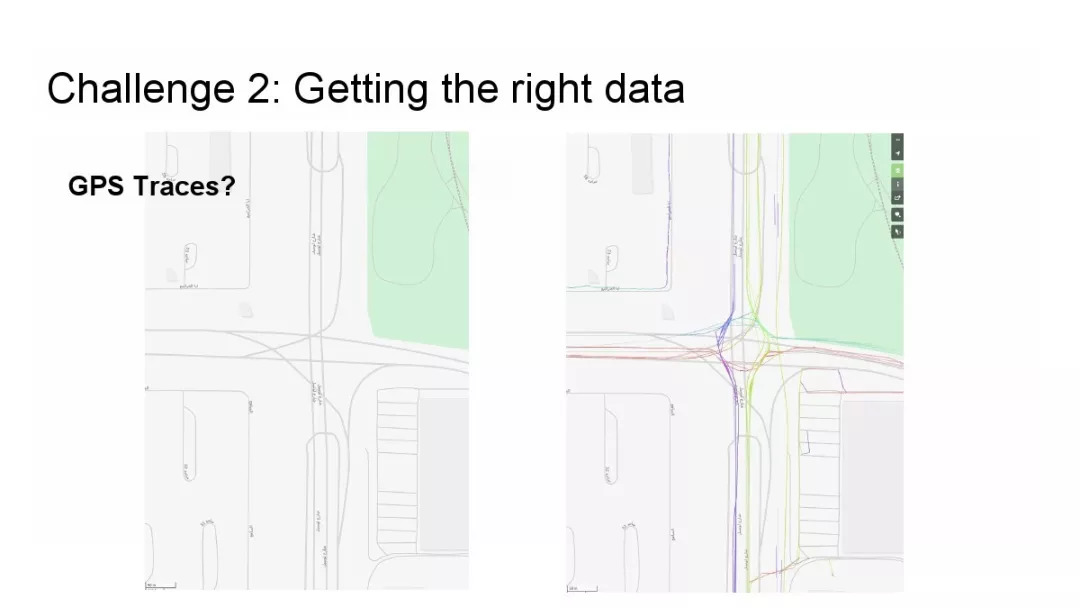
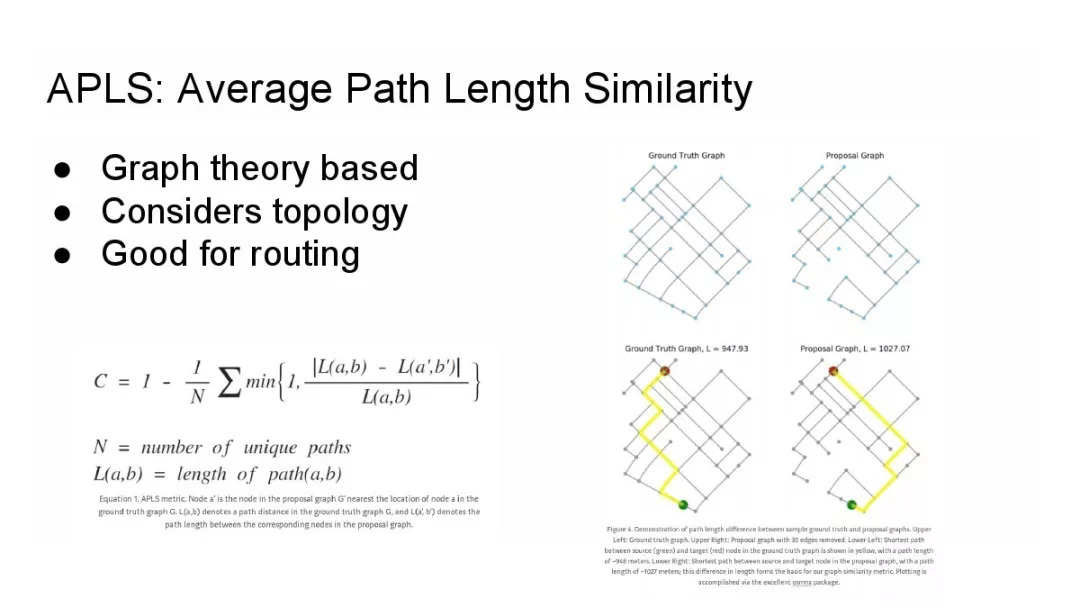
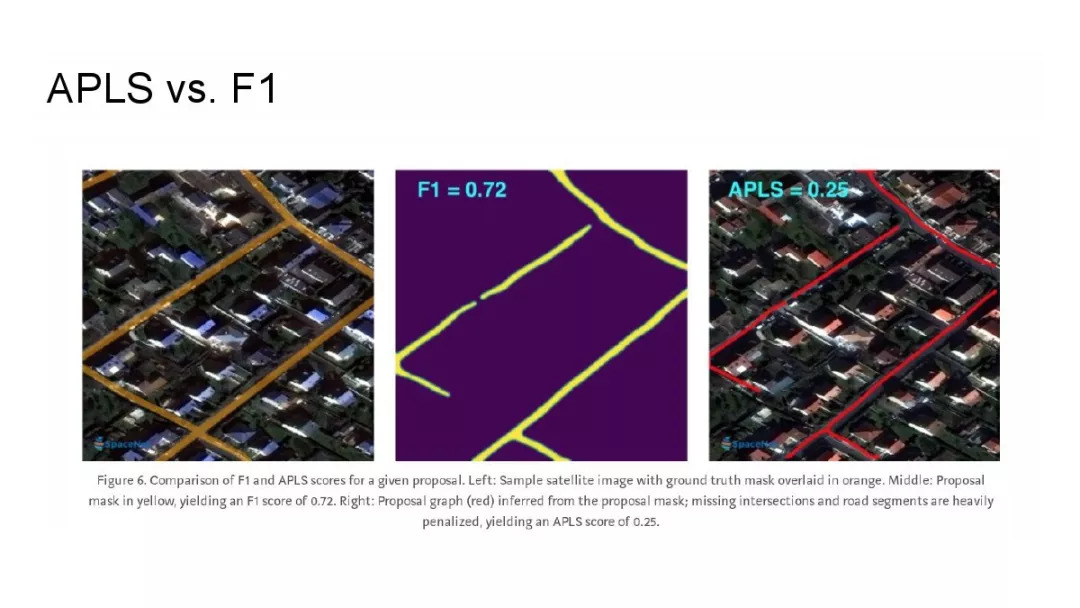
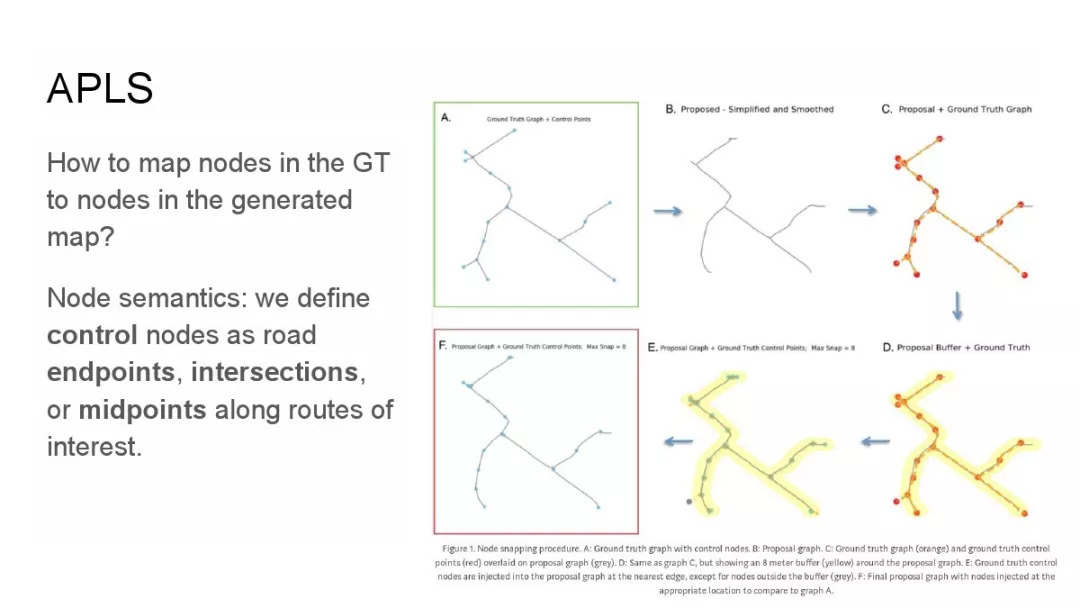
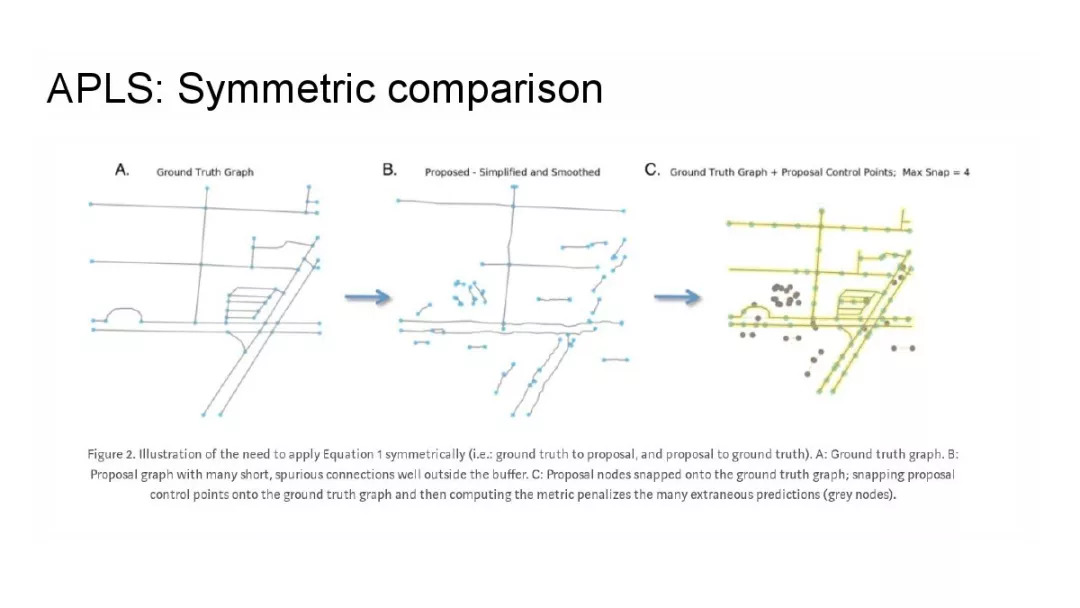
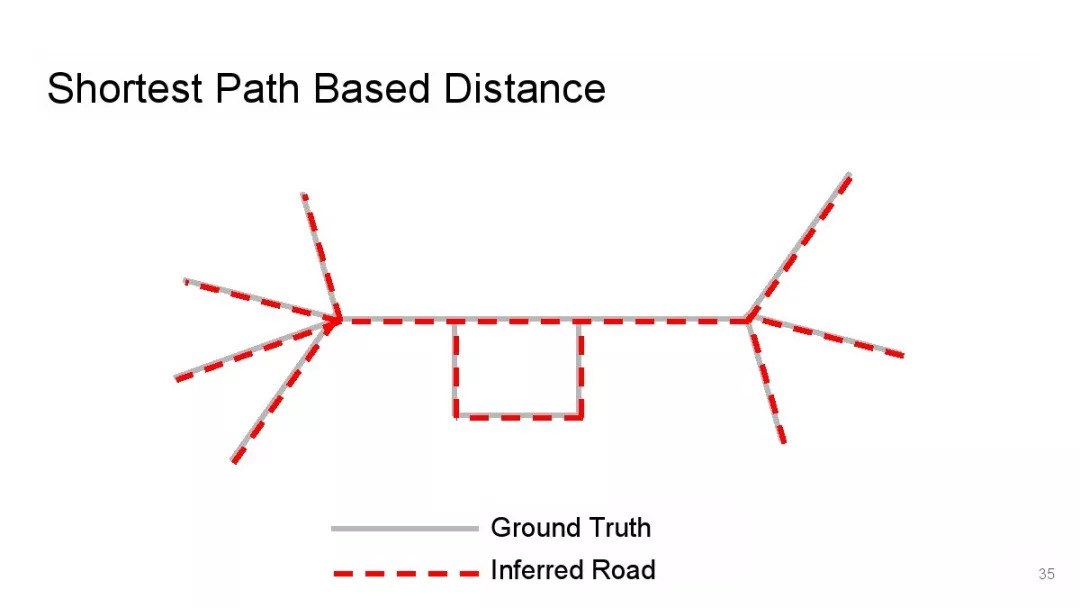
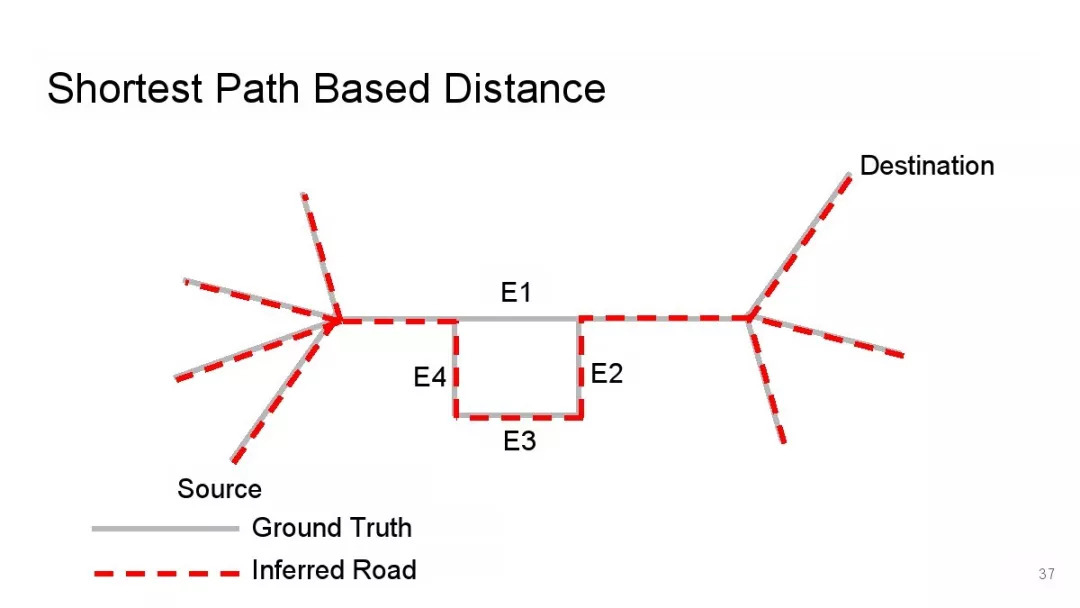
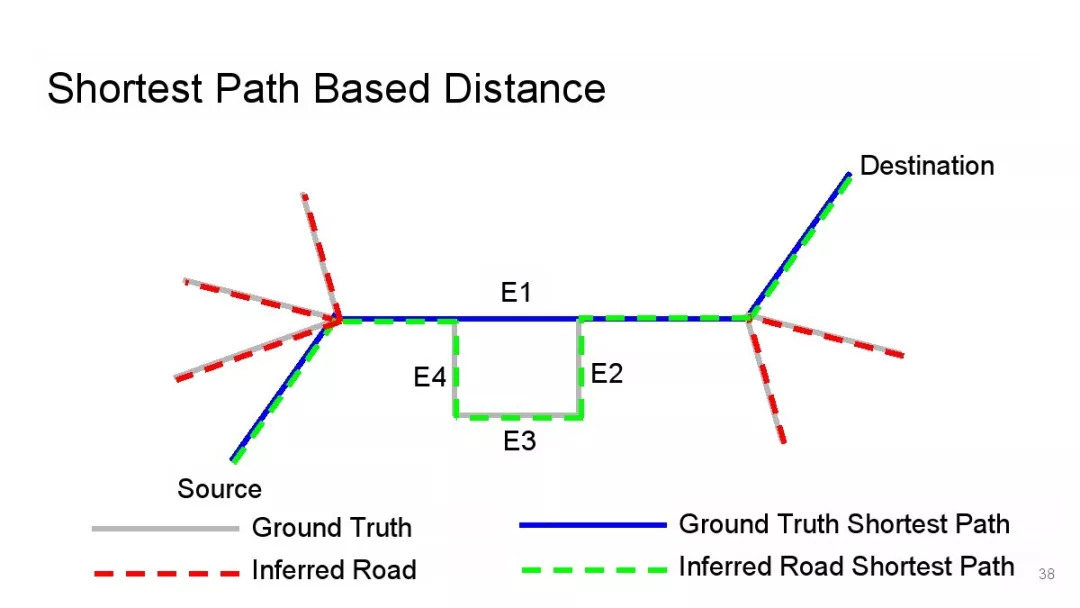
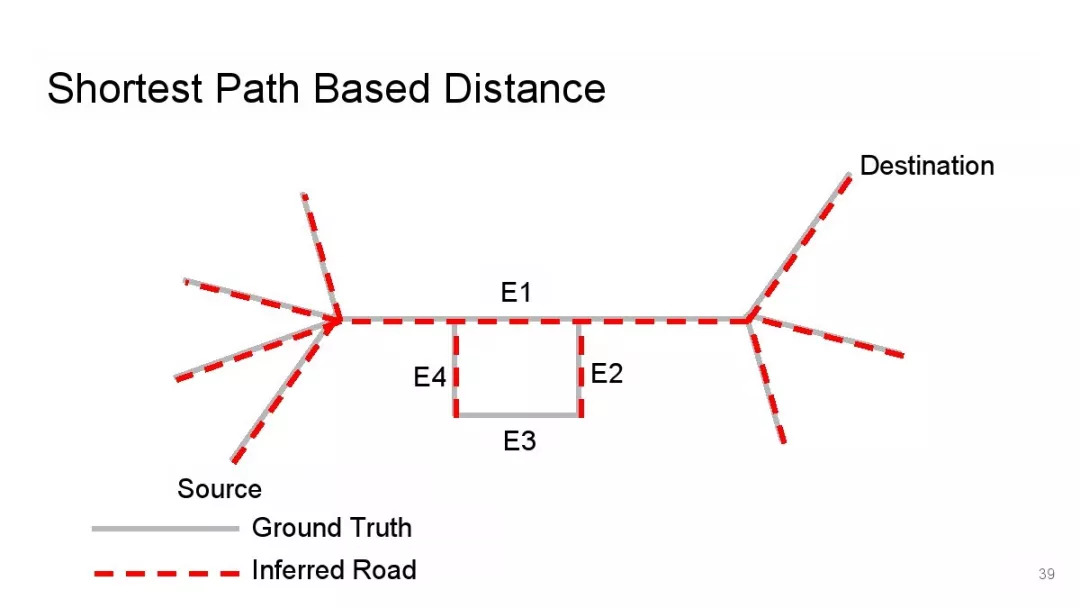
在本教程中,我们将回顾算法地图推理(AMI)的新兴领域,即使用各种数据源(主要是GPS数据和卫星图像)自动构建和更新地图的算法设计。
官方网站:
https://sites.google.com/view/algorithmic-map-making/home
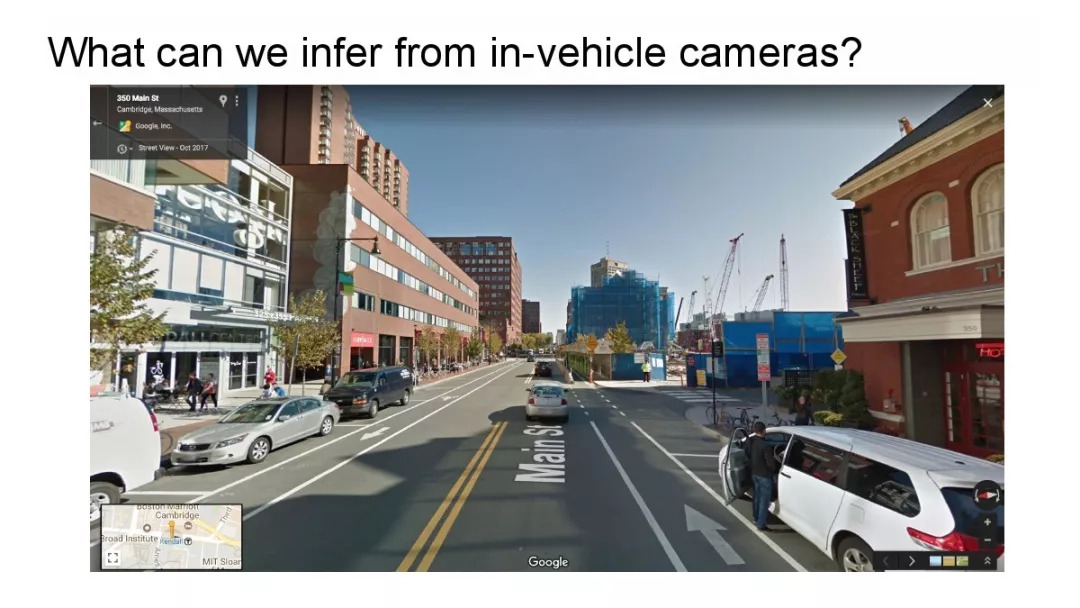
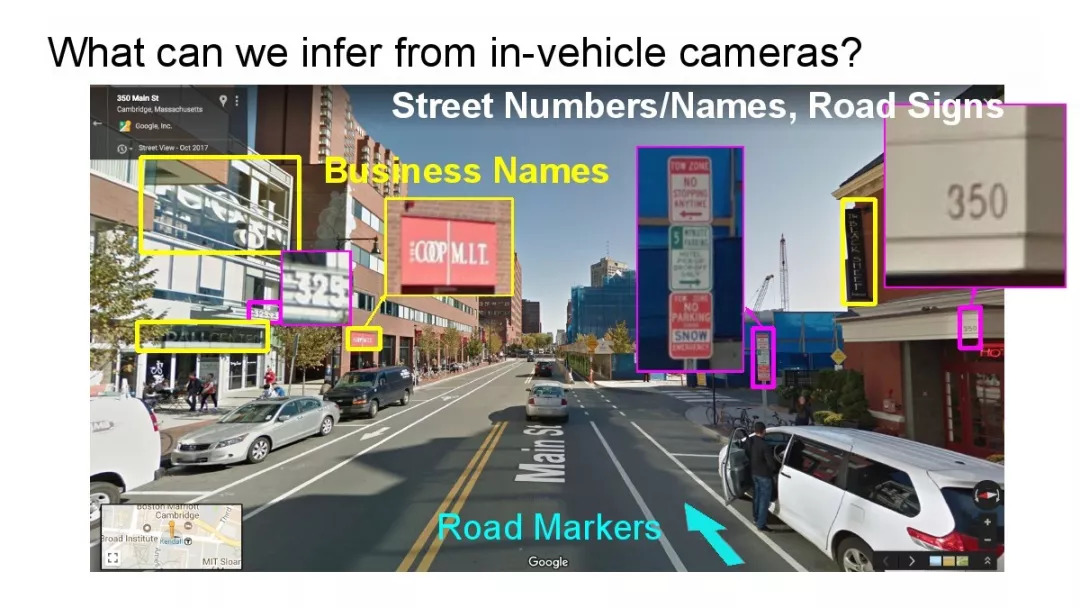
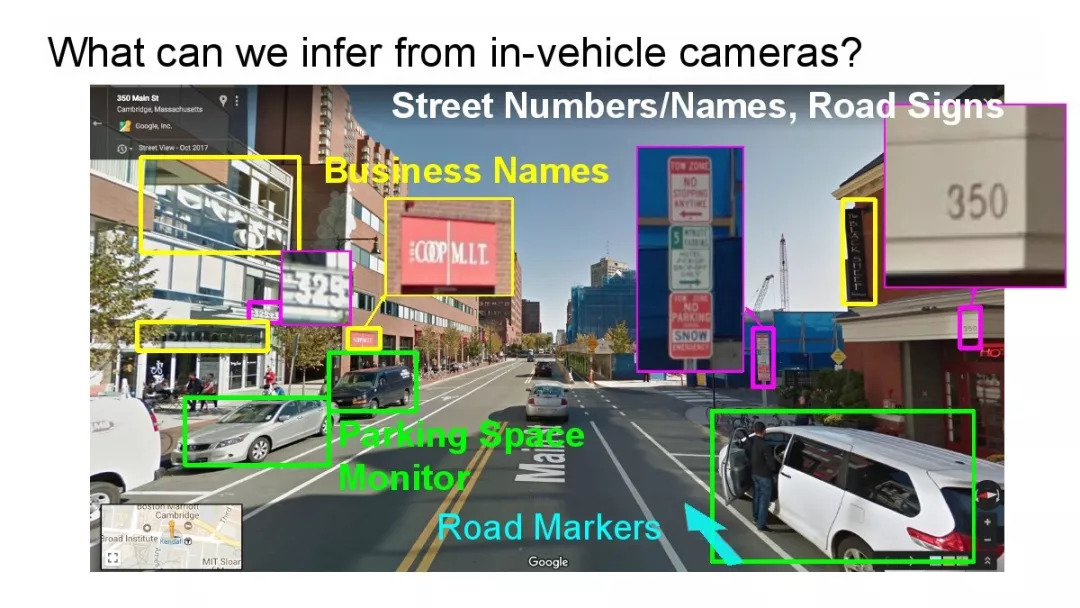
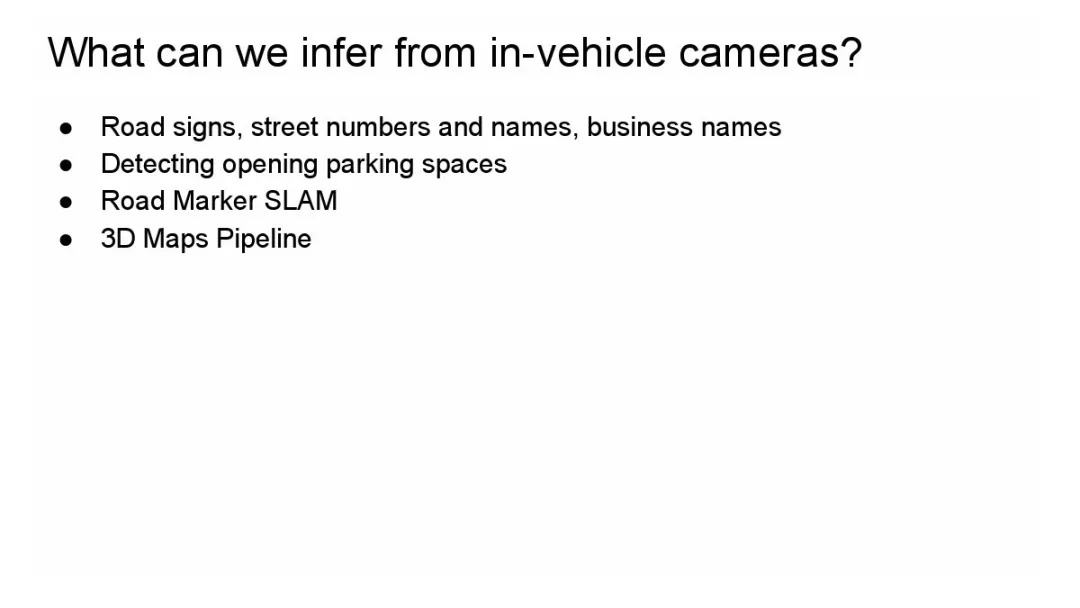
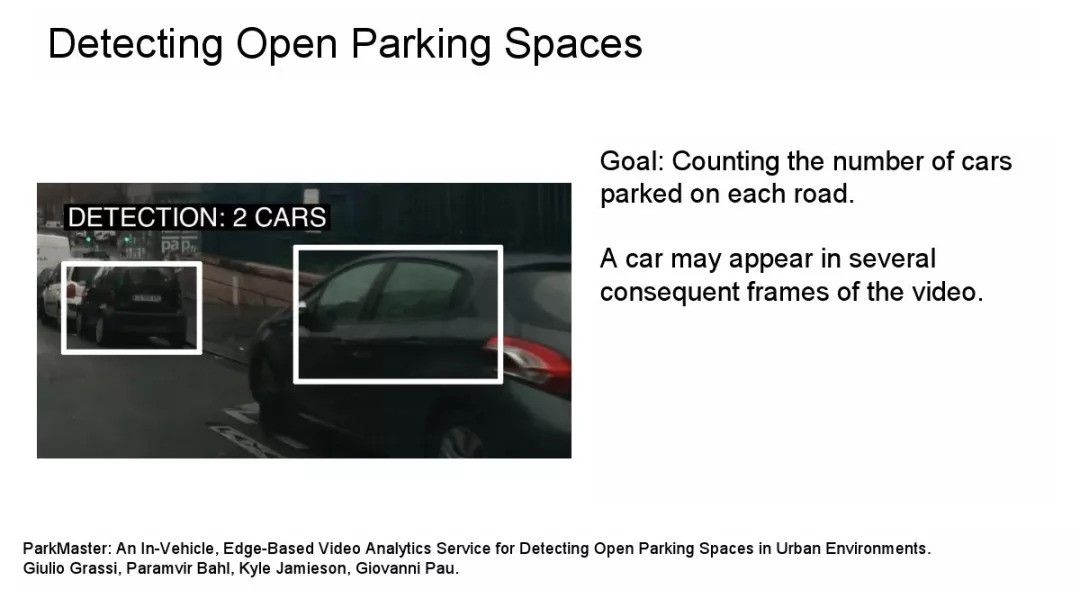
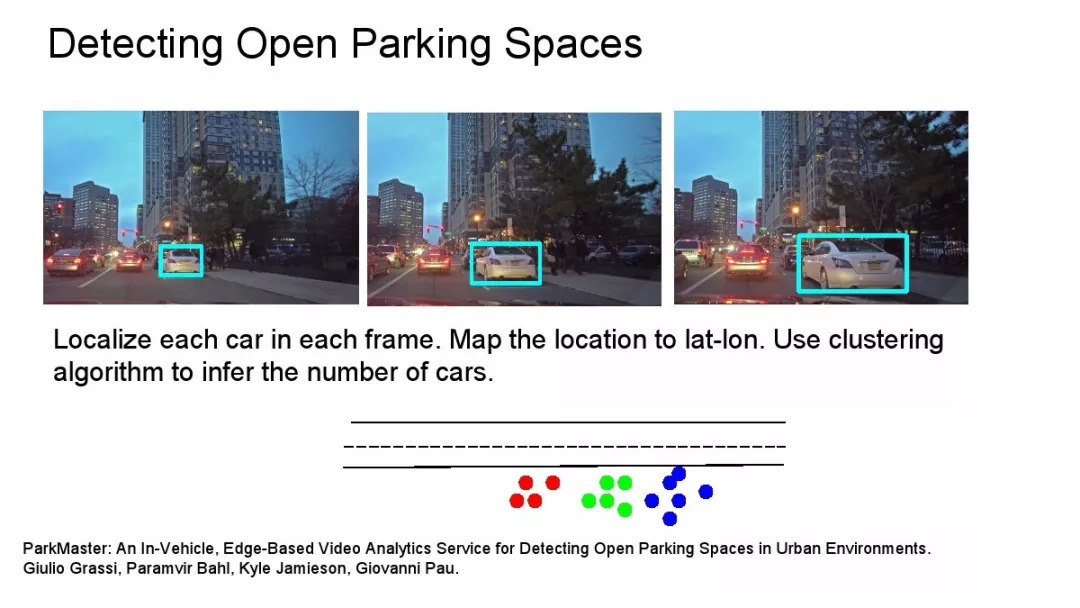
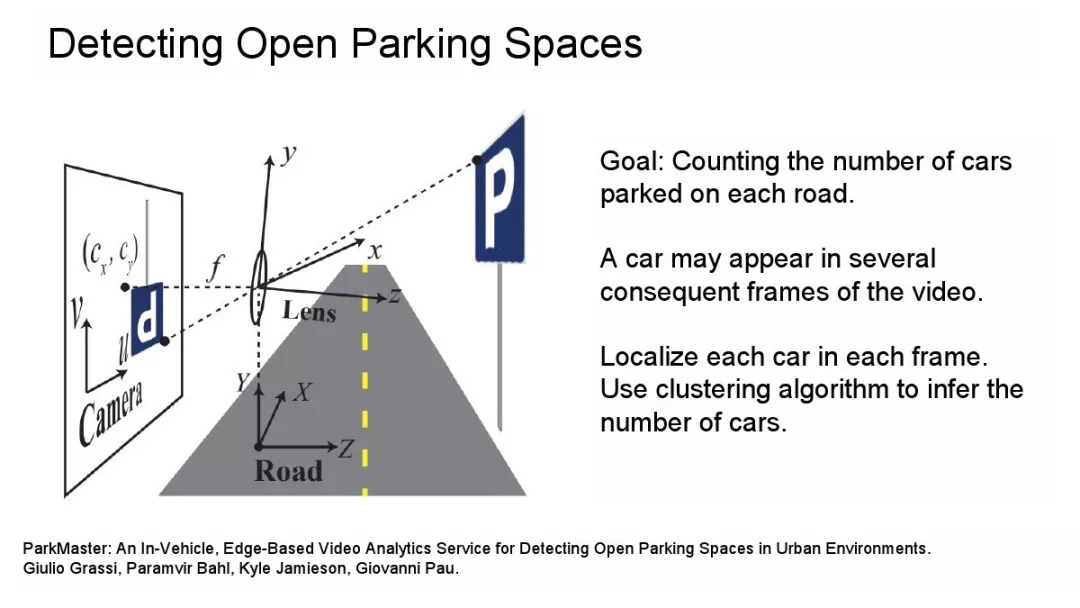
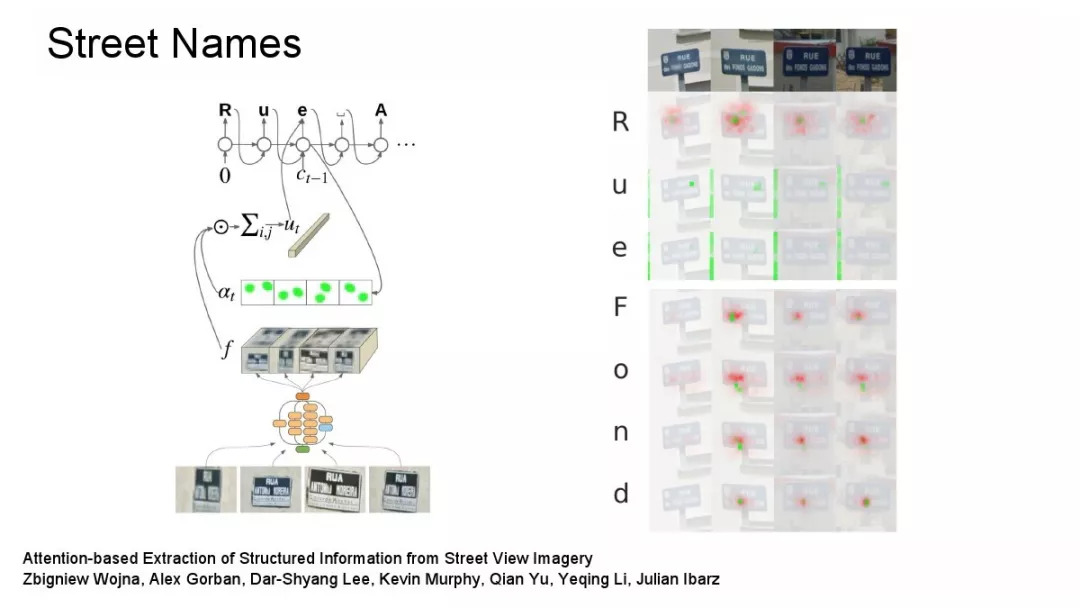
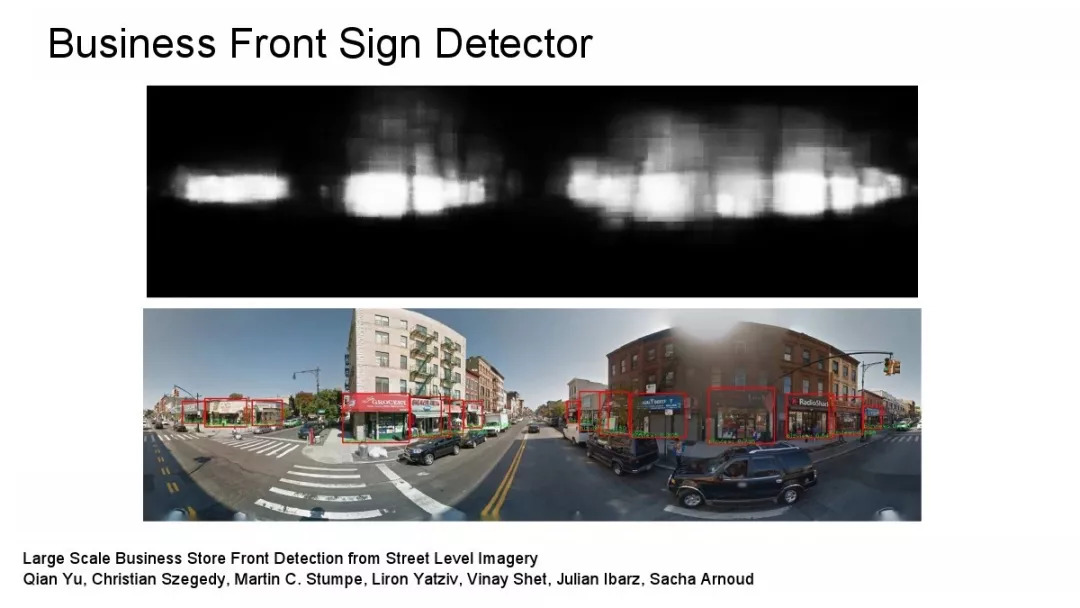
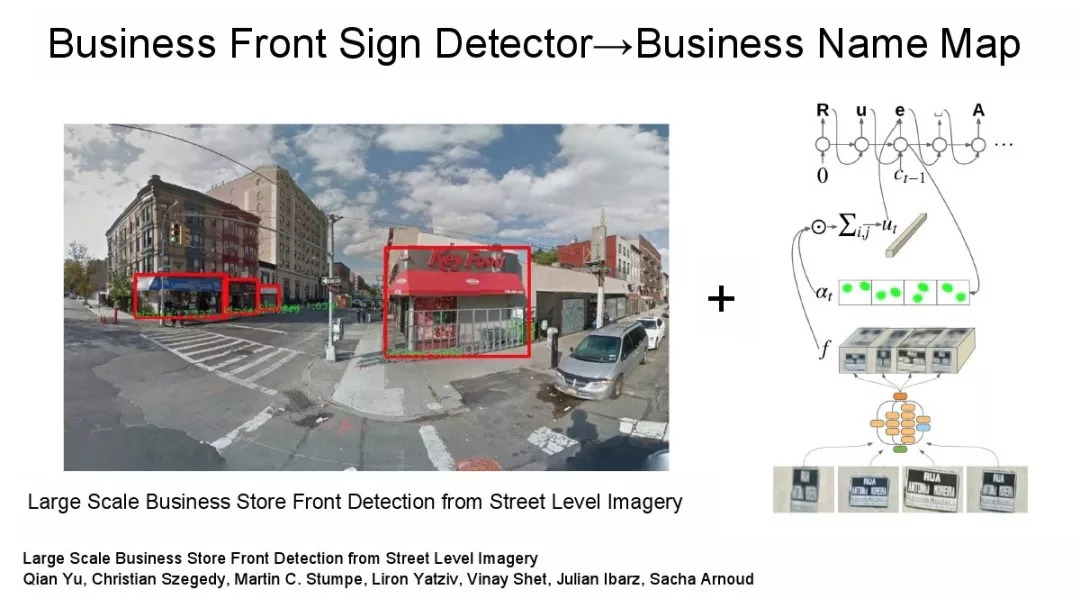
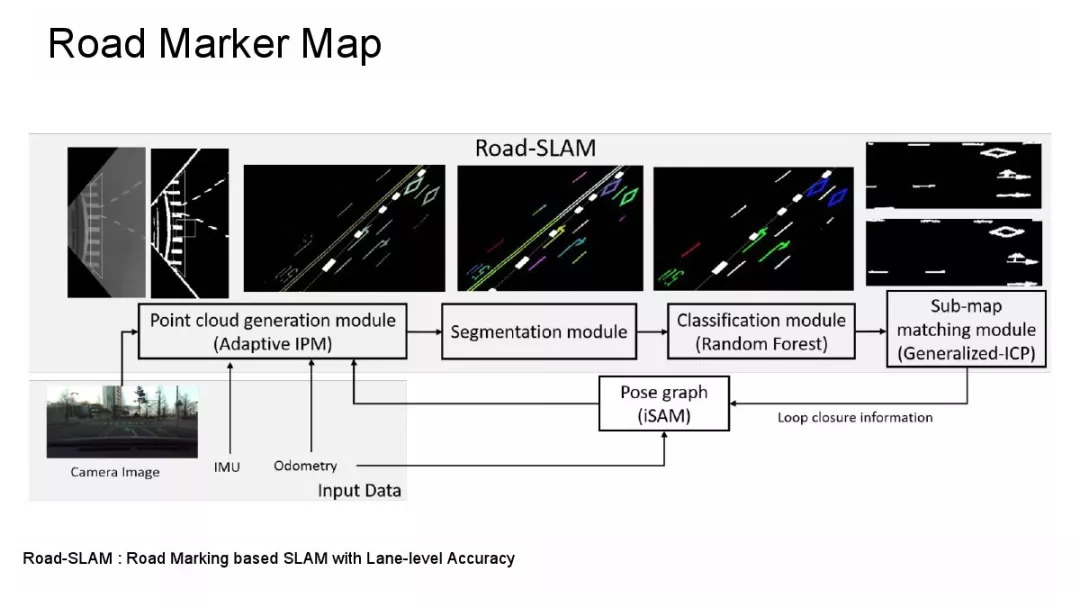
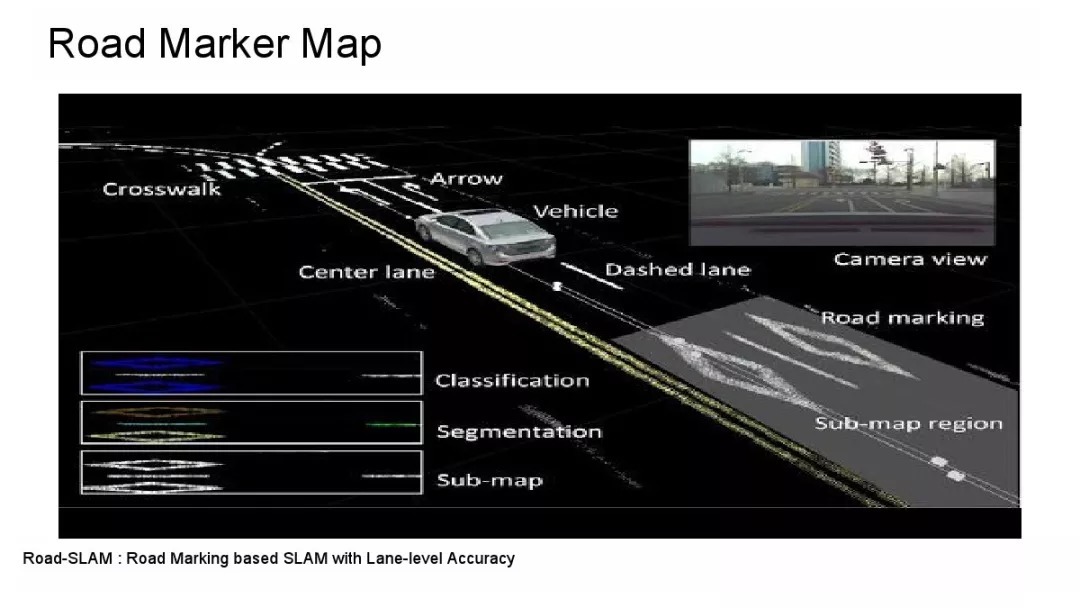
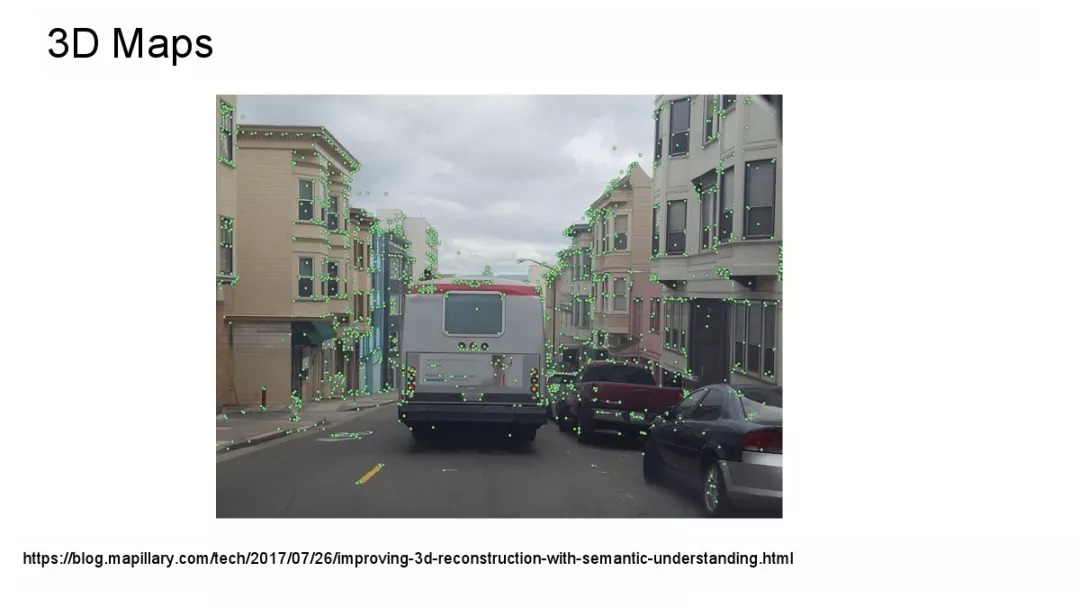
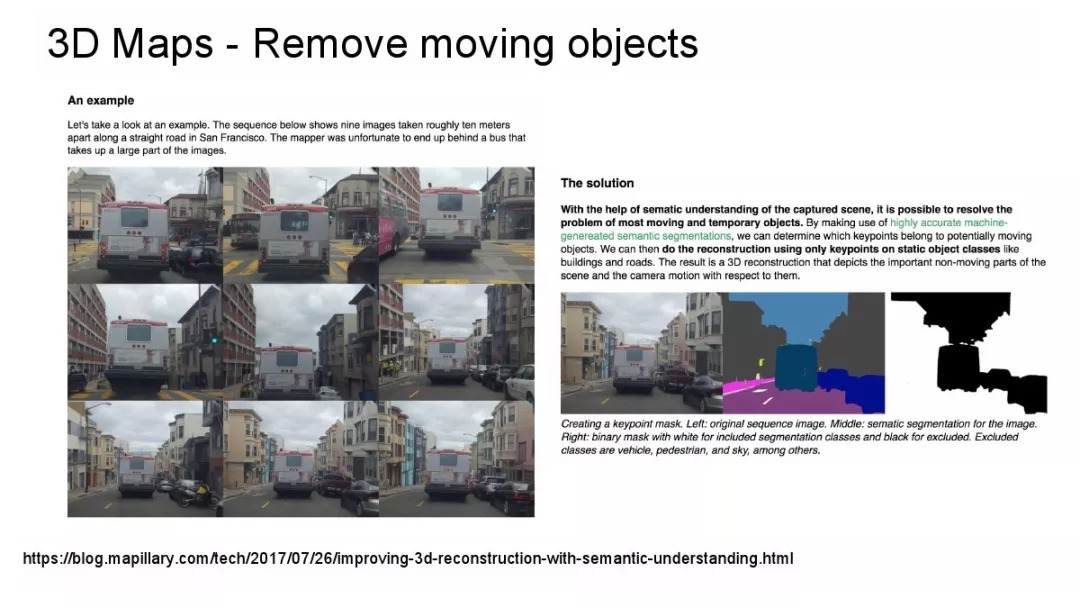
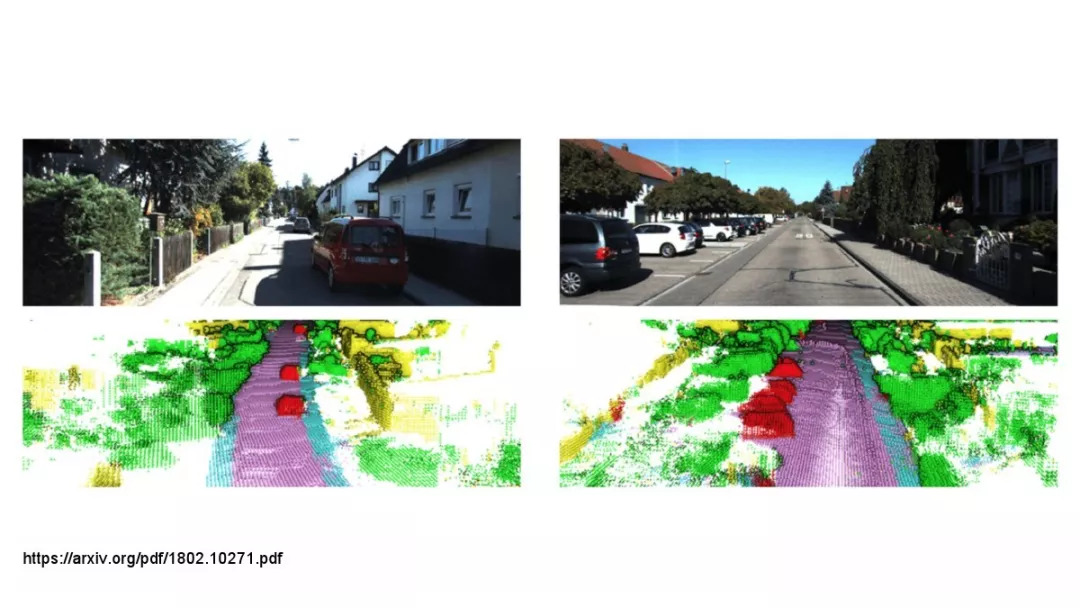
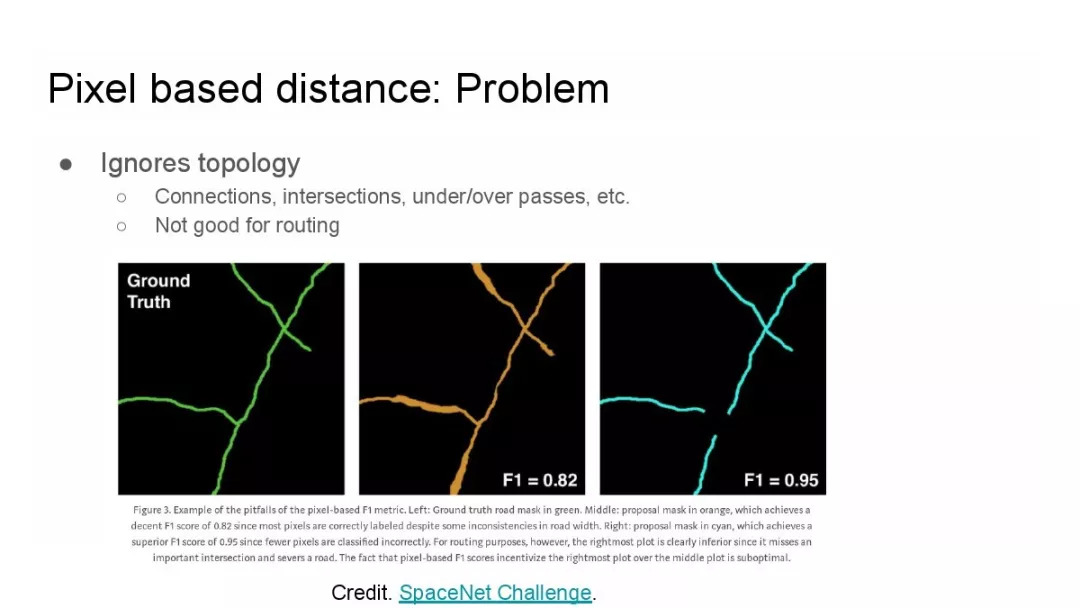
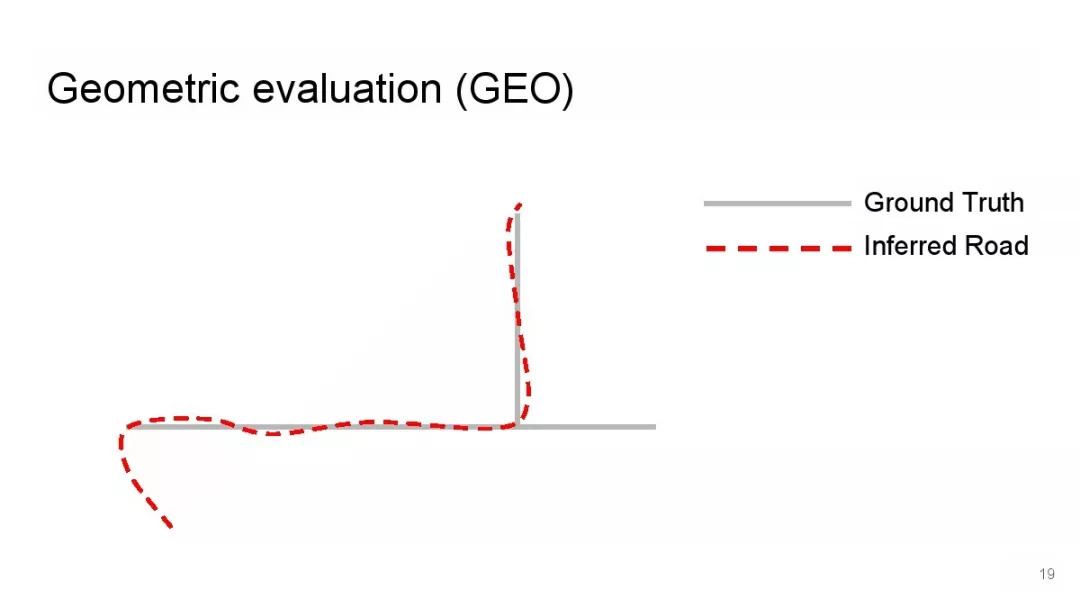
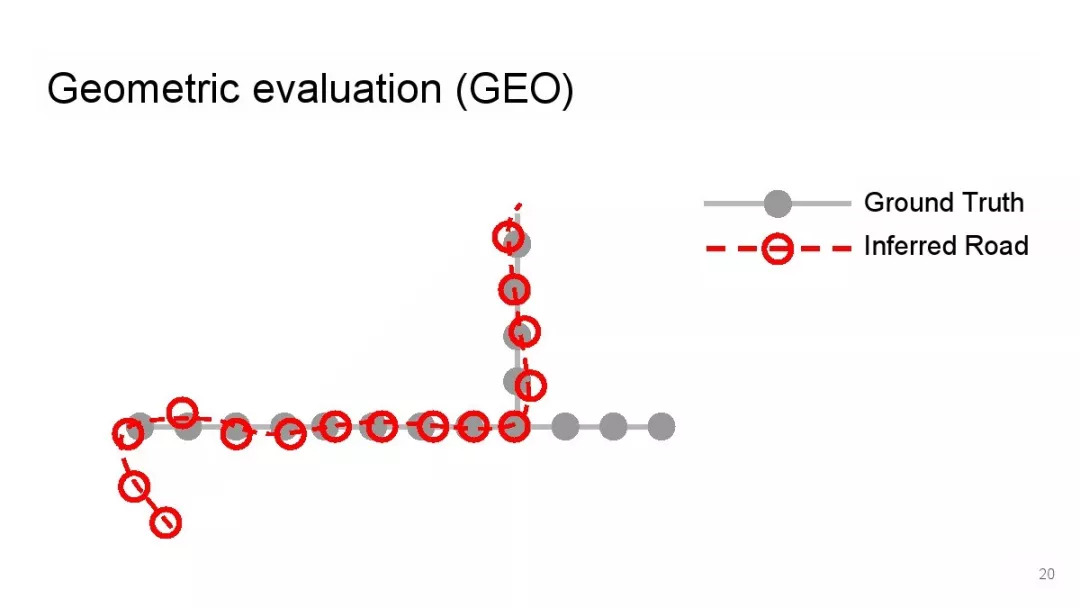
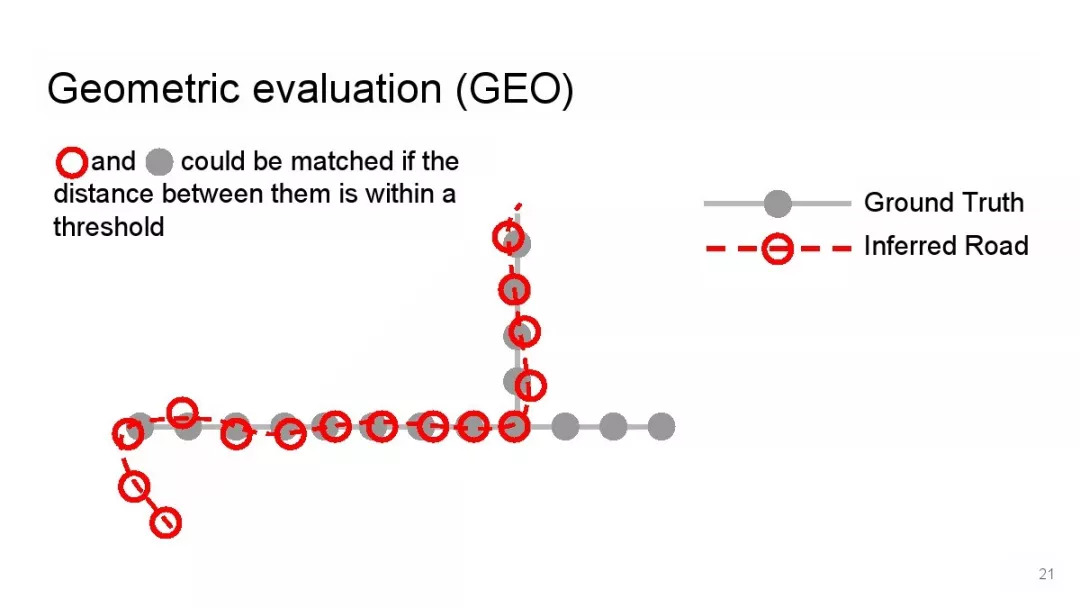
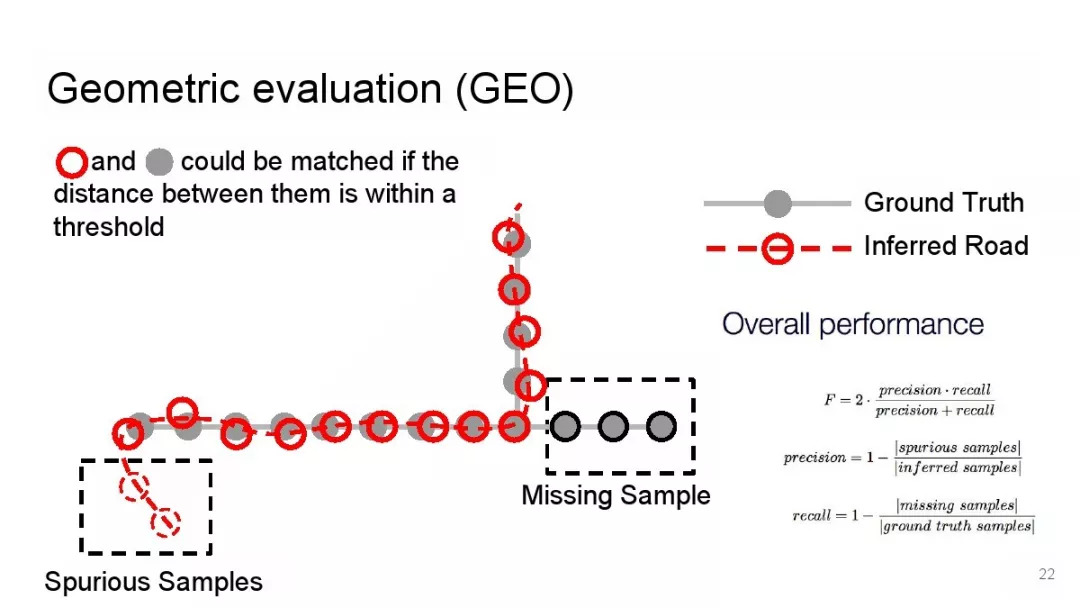
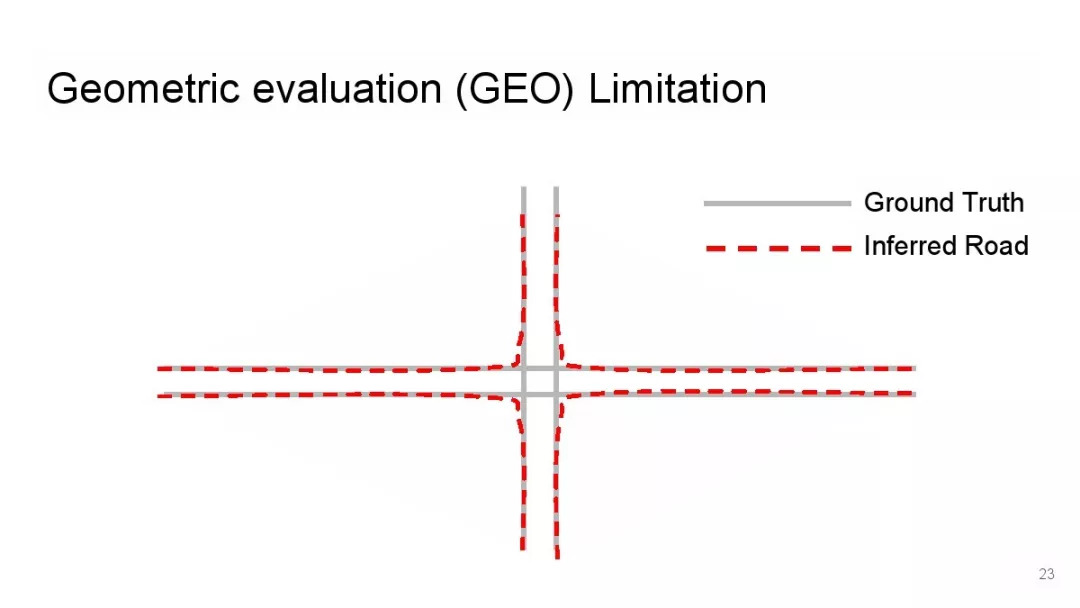
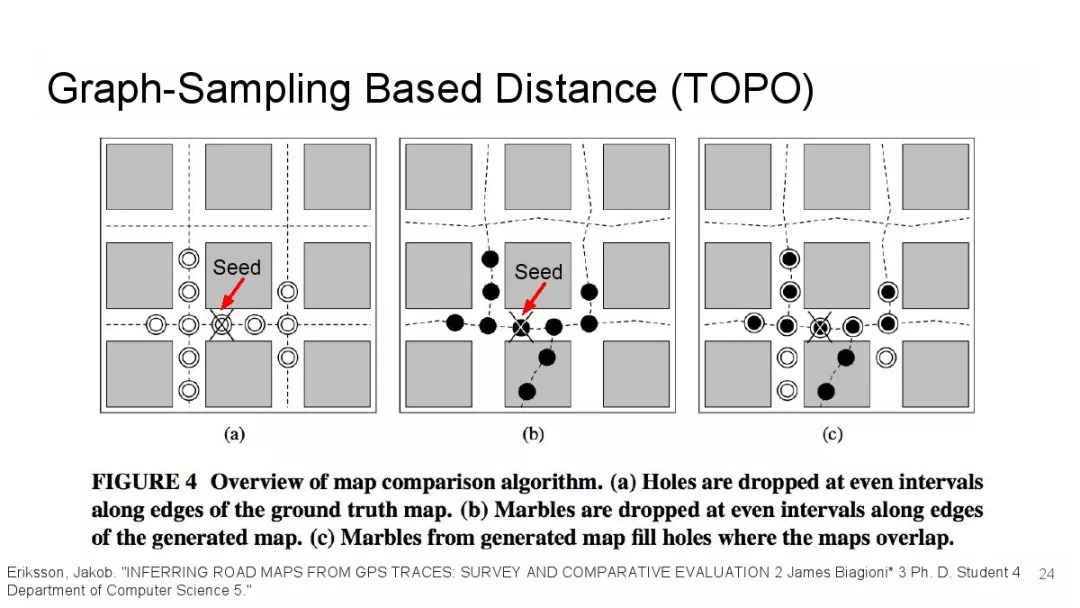
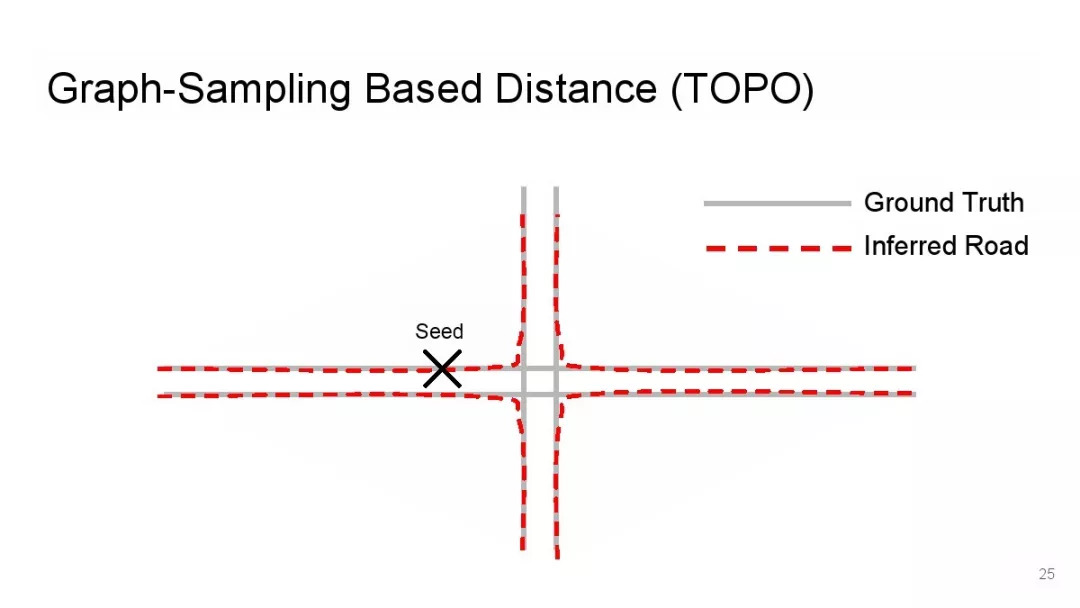
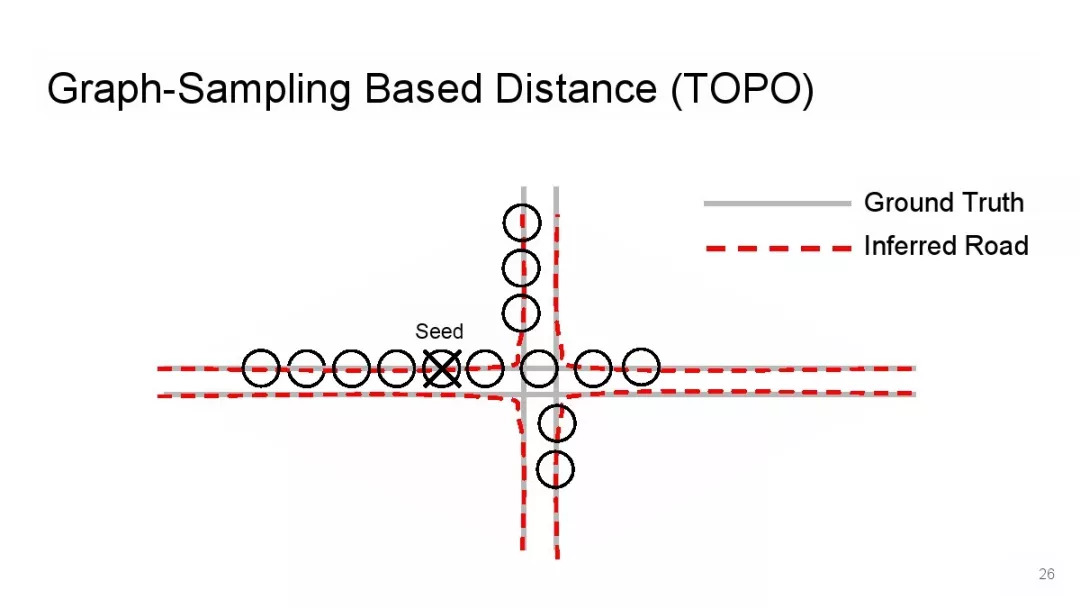
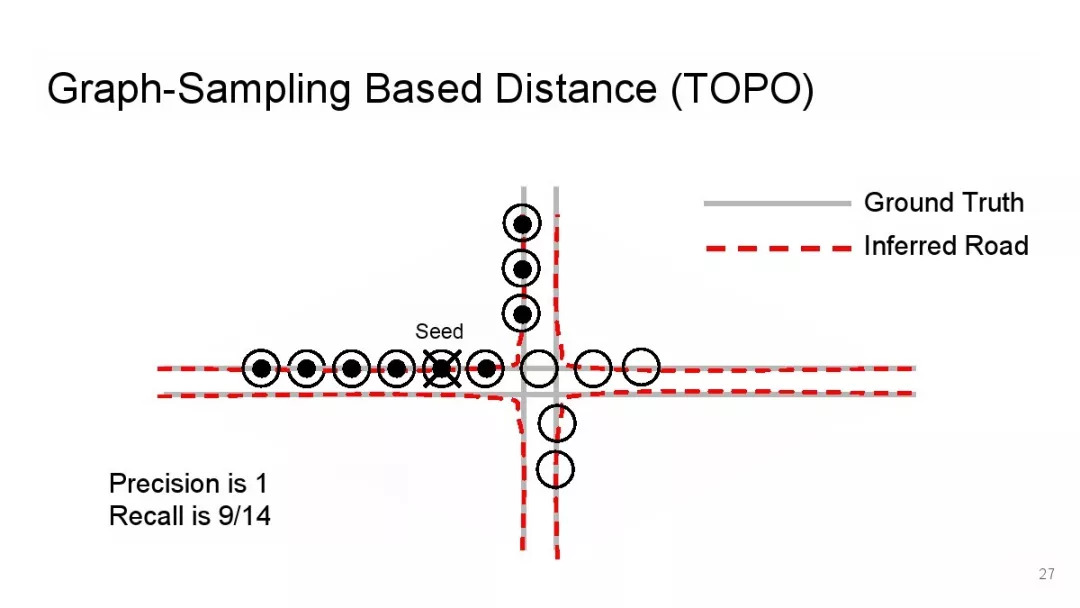
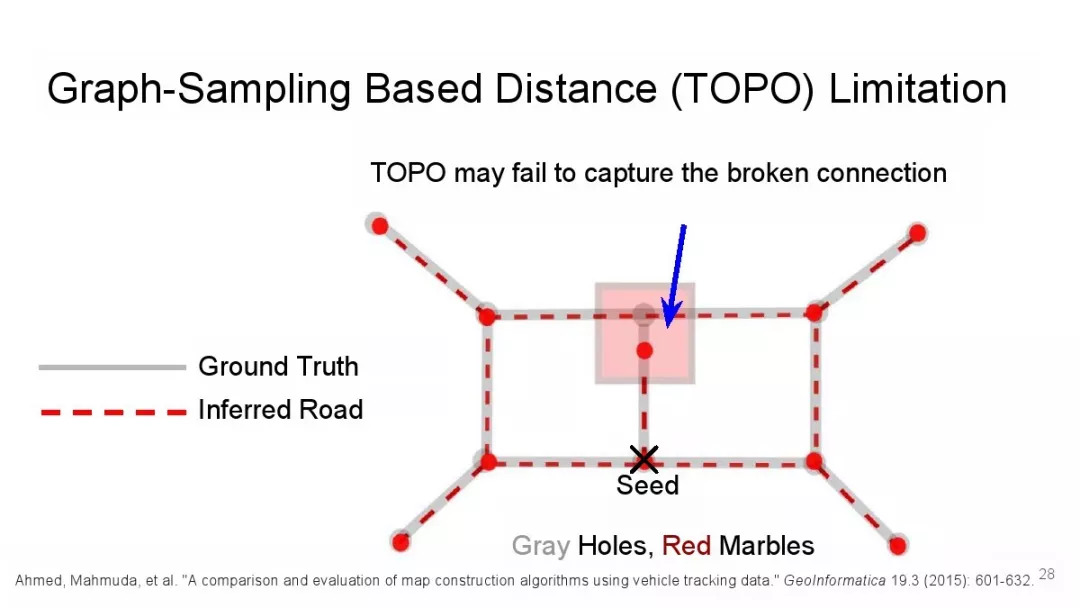
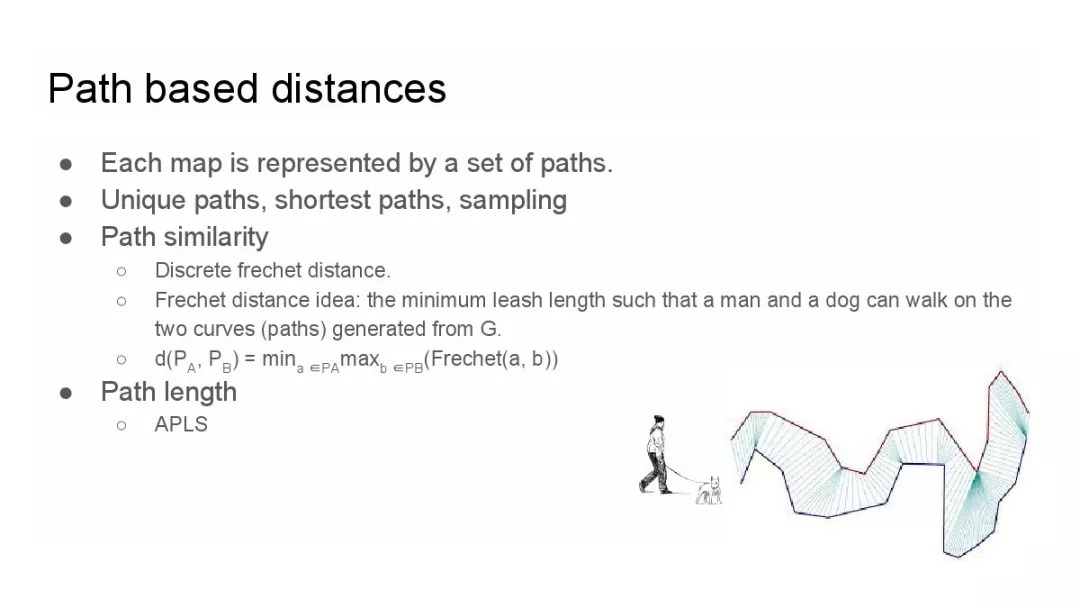
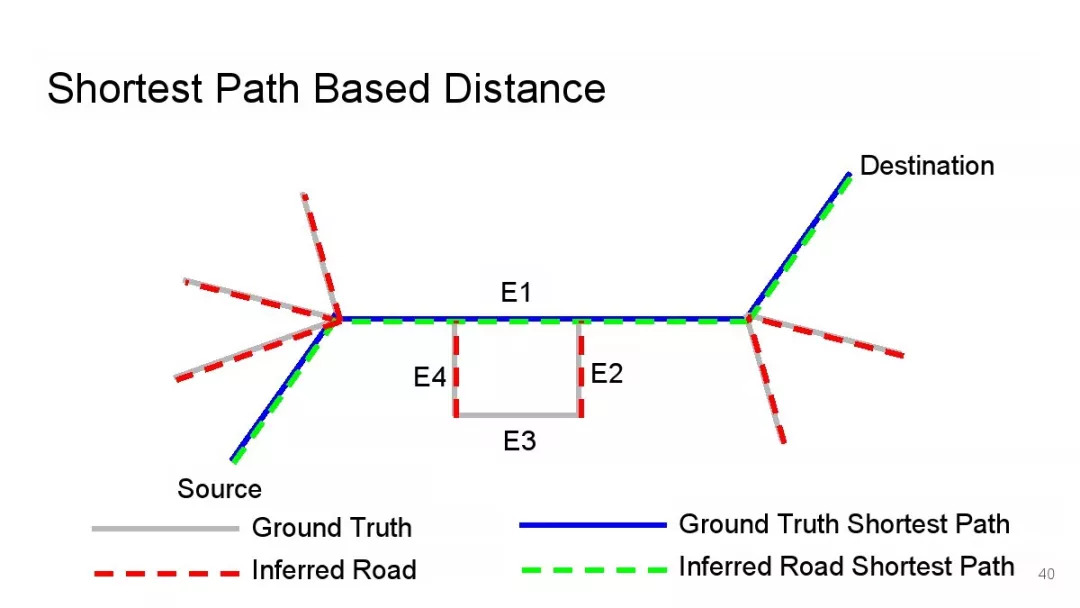
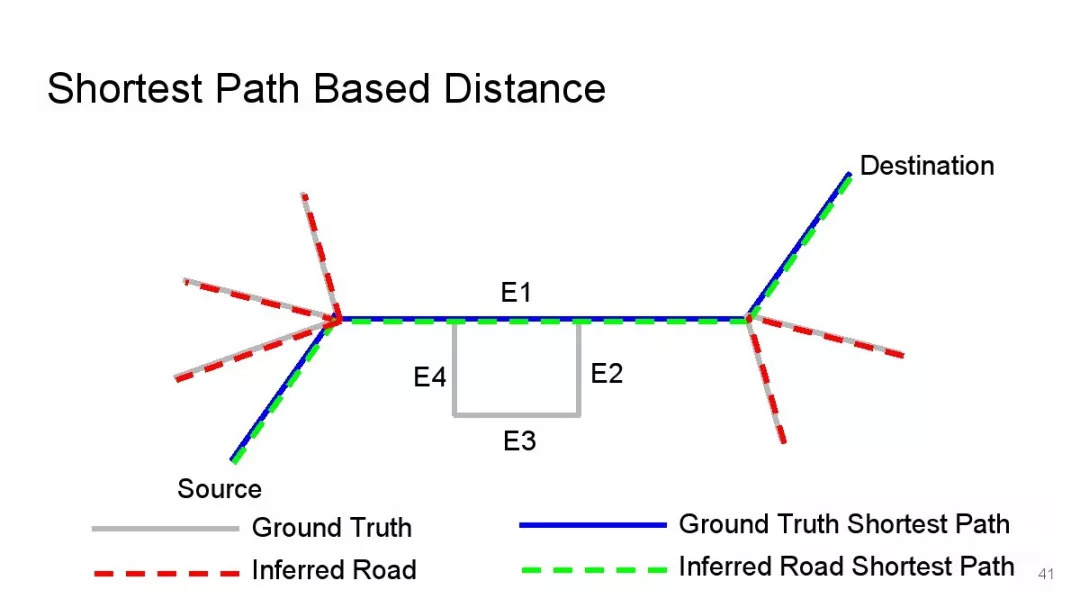
教程主要从基于GPS、卫星图、随车摄像的三个方面地图推理展开,并讨论了高精度地图的质量。
请关注专知公众号(扫一扫最下面专知二维码,或者点击上方蓝色专知),
后台回复“KDD2018CAR” 就可以获取最新PPT 下载链接~
附PPT












-END-
专 · 知
人工智能领域26个主题知识资料全集获取与加入专知人工智能服务群: 欢迎微信扫一扫加入专知人工智能知识星球群,获取专业知识教程视频资料和与专家交流咨询!

请PC登录www.zhuanzhi.ai或者点击阅读原文,注册登录专知,获取更多AI知识资料!

请加专知小助手微信(扫一扫如下二维码添加),加入专知主题群(请备注主题类型:AI、NLP、CV、 KG等)交流~

请关注专知公众号,获取人工智能的专业知识!
点击“阅读原文”,使用专知
展开全文



