自动驾驶汽车的计算机视觉全面综述论文:问题、数据集和现状,附283页PDF下载
【导读】随着近几年来AI技术的飞速发展,人们将计算机视觉技术应用于自动驾驶,使得自动驾驶的应用变得可行,很大程度地推进了自动驾驶技术的发展。本文介绍一篇关于自动驾驶计算机视觉的全面综述,覆盖了该领域相关的问题、数据集和最先进的技术。
近几年来,我们目睹了AI相关领域取得的巨大的进步,如计算机视觉、机器学习、自动驾驶等。随着这些领域的飞速发展,初学者很难了解领域最新的进展。在自动驾驶计算机视觉领域,尽管出现了一些关于特定子问题的综述,但尚未发布关于问题、数据集和方法的全面和综合的综述。
综述《Computer Vision for Autonomous Vehicles: Problems, Datasets and State of the Art》试图通过提供对目前最先进的相关技术和数据集的调研来缩小人们对该领域的认知鸿沟。综述既包括了已有的最相关的文献,也包含了一些特殊主题目前最先进的成果,如识别、重建、运动估计、跟踪、场景理解和自动驾驶端到端学习。综述还包含了对最先进技术在KITTI、MOT和Cityscapes等几个具有挑战性的基准数据集上的性能的分析。
另外,该综述还讨论了一些开放问题和目前的研究挑战。综述还提供了一个网站,方便人们访问相关的主题,以及提供额外的信息。
综述首先提供了自动驾驶的简要历史,然后介绍了相机模型和校准技术。接着,综述介绍了与自动驾驶相关的数据集(重点关注与感知相关的数据集)、相关的感知任务和最新的解决方法。尤其是,综述回顾了目标检测、目标跟踪、语义(实体)分割、重建、运动估计和场景理解。每个章节包含了问题定义、重要方法和主要设计选择、顶尖技术在流行数据集上的定性和定量分析以及关于领域最先进技术的讨论。最终,综述提供了关于最先进端到端自动驾驶模型的概览。
综述的目录大致如下:
简介
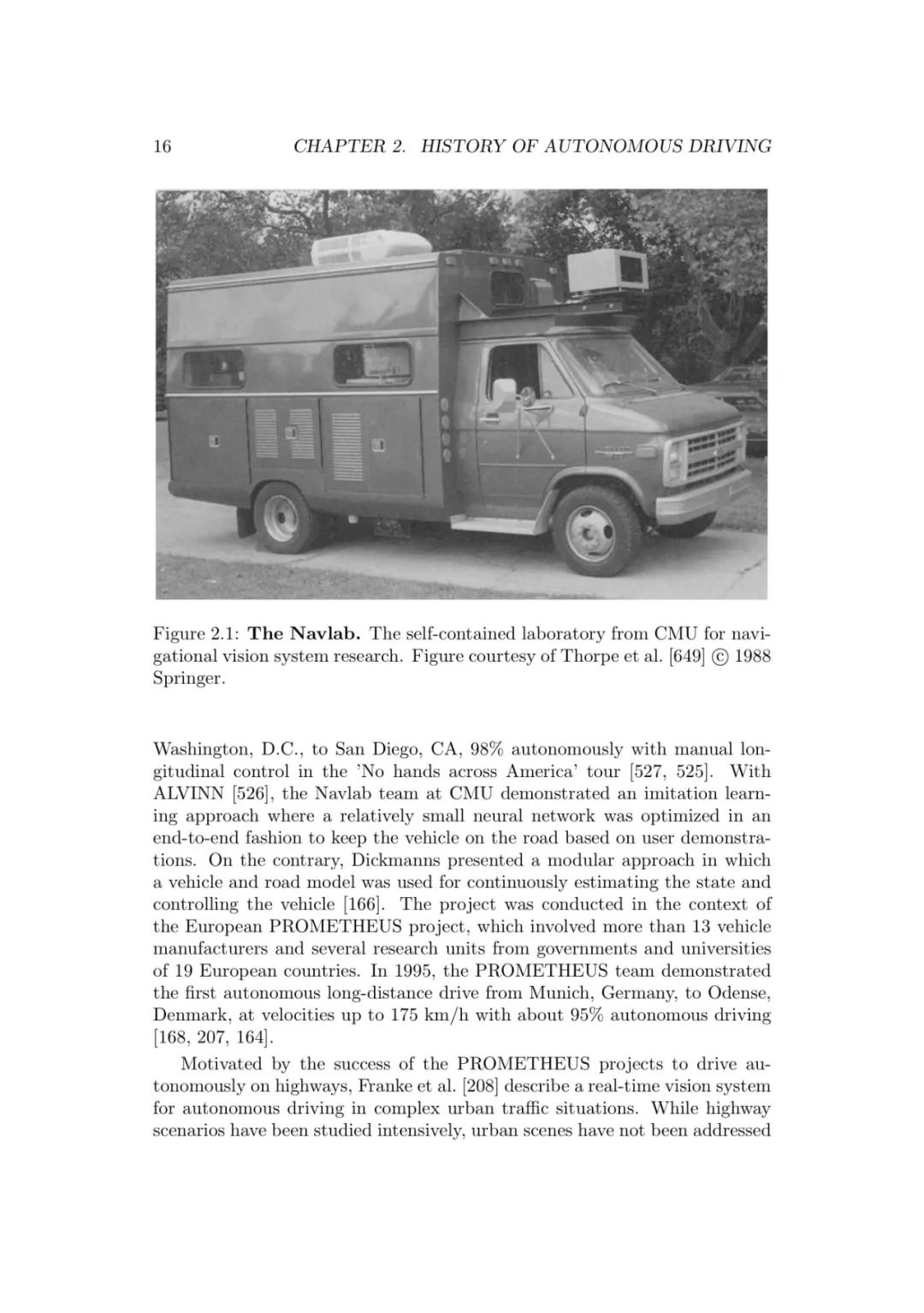
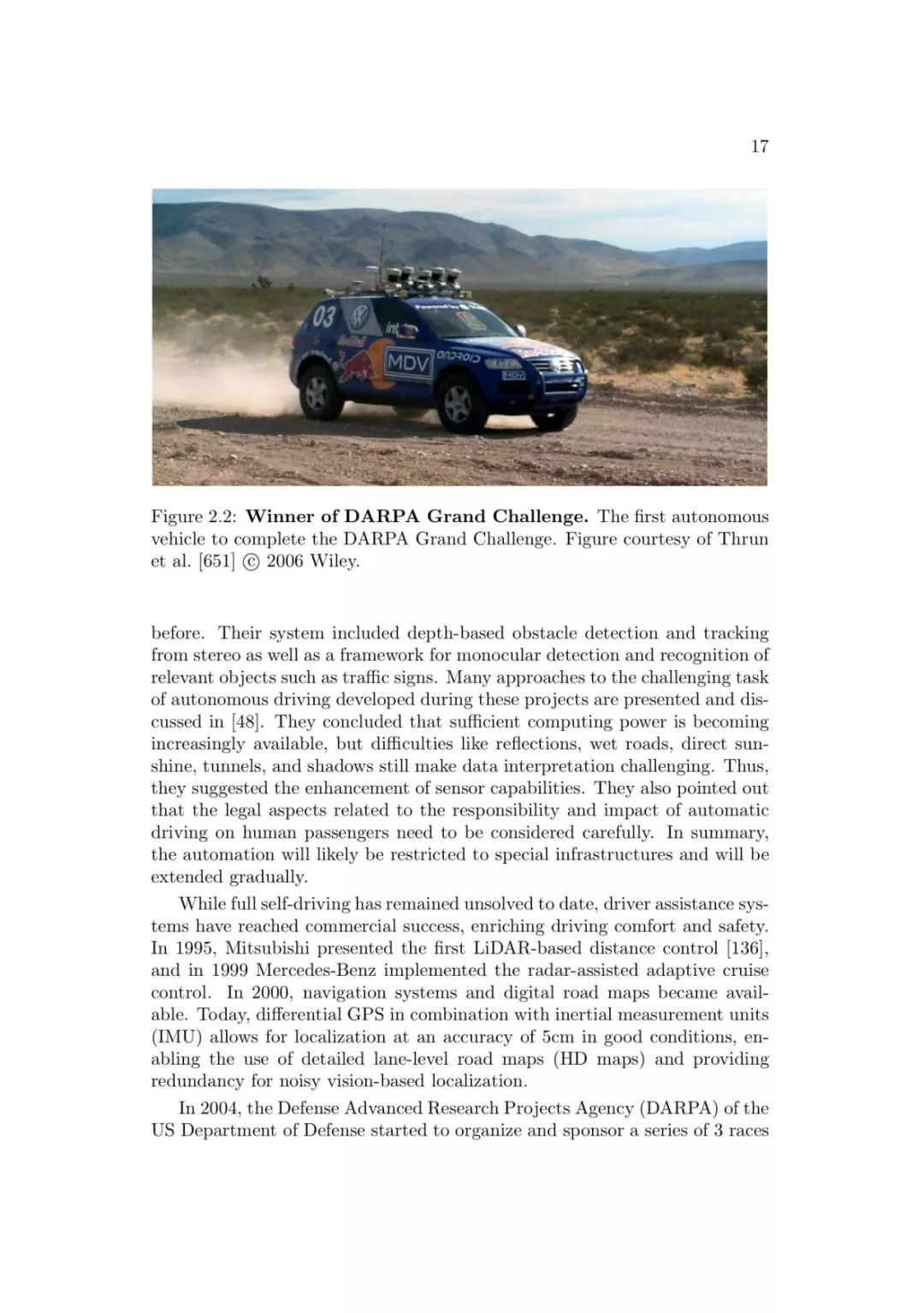
自动驾驶的历史
感知器
数据集和基准
目标检测
目标跟踪
语义分割
语义实体分割
立体
多视角3D重建
光流
3D场景流
地图、定位和Ego-Motion估计
场景理解
自动驾驶的端到端学习
总结
-
后台回复“CVA” 就可以获取完整教程PDF的下载链接~
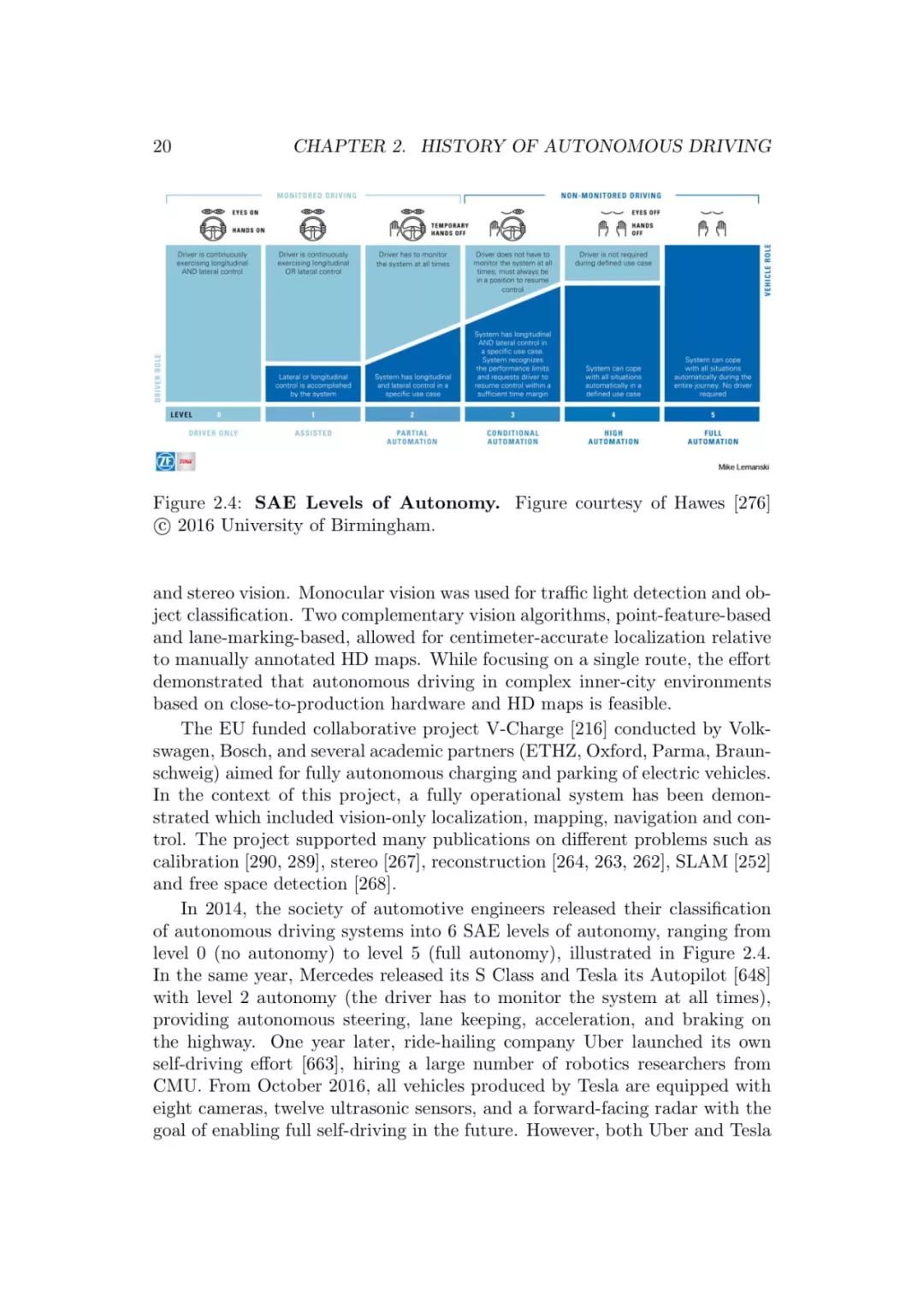
教程部分截图如下所示:




参考链接:
https://arxiv.org/abs/1704.05519v2


展开全文



