一文解读Linux主线内核首个原生支持容器镜像分发方案

容器化是最近几年 DevOps 界流行的趋势,通过业务的容器化我们将创建一个完全打包、自包含的计算环境,让软件开发人员能够更加快速地创建和部署自己的应用程序。然而长期以来,由于镜像格式的限制,容器启动镜像的加载是很慢的(相关背景细节可以参考 “容器技术之容器镜像篇”)。
为了加速容器的启动,我们可以将优化后的容器镜像搭配 P2P 网络等技术,从而有效降低容器部署启动的时间,并可保障容器持续稳定运行。(“让容器应用管理更快更安全,Dragonfly 发布 Nydus 容器镜像加速服务”。)
除了启动速度,镜像分层、去重、压缩、按需加载等核心特性在容器镜像领域也尤为重要。
但是由于没有原生的文件系统支持,大多数都选择了用户态方案,Nydus 最初亦如此。随着方案和需求的不断演进,用户态方案遇到了越来越多的挑战,如性能与原生文件系统相比有较大差距、高密场景下资源开销较大等等。究其原因,主要是在用户态实现镜像格式的解析、按需加载等操作,将带来大量内核态 / 用户态通信开销。所以看起来解决了启动速度,这些核心功能的研发就会有不小的挑战,有点顾此失彼。
那么有没有可能做到鱼和熊掌兼得呢?为此,龙蜥社区做了一个大胆的尝试,我们设计并实现了兼容内核原生 EROFS 文件系统的 RAFS v6 格式,希望将容器镜像方案下沉到内核态。 同时为了一劳永逸,我们也尝试将这个方案推进到内核主线以让更多的人受益。最终,随着 Linux 内核各位大佬的挑战和我们的不断完善,erofs over fscache 按需加载技术终于被合入 5.19 内核(链接见文末),至此 Nydus 镜像服务的下一代容器镜像分发方案逐渐清晰起来。
这也是 Linux 主线内核 首个原生支持、开箱即用的容器镜像分发方案,容器镜像的高密、高性能、高可用和易用性从此不再是个问题。
本文将从 Nydus 架构回顾、RAFS v6 镜像格式和 EROFS over Fscache 按需加载技术三个角度来分别介绍这一技术的演变历程,并通过对比数据展示了当前方案的卓越性能,希望大家能够尽早享受到容器启动飞一样的体验!
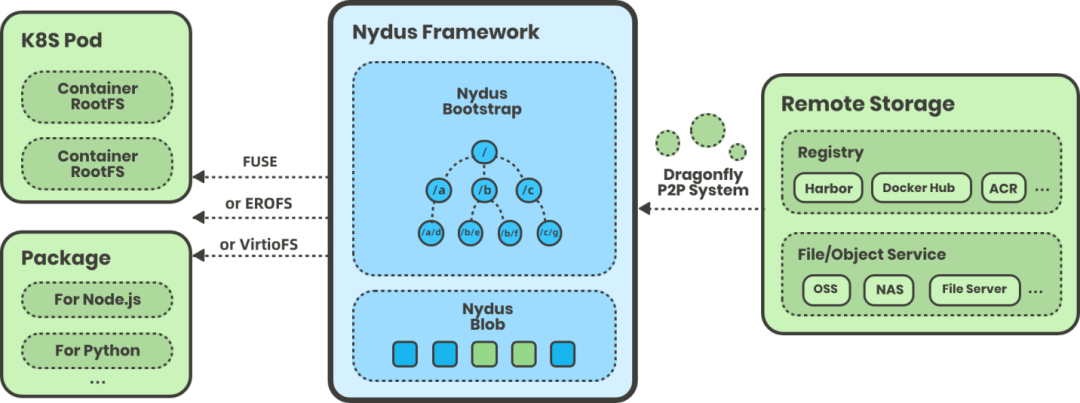
一句话总结一下,Nydus 镜像加速服务 是一种优化了现有的 OCIv1 容器镜像架构,设计了 RAFS (Registry Acceleration File System) 磁盘格式,最终呈现为一种文件系统的容器镜像格式的镜像加速实现。
容器镜像的根本需求,本质上是为了提供容器的根目录 (rootfs),这可以通过文件系统 (file system) 或者是归档格式 (archive format) 来承载,当然也可以在文件系统的基础上二次套娃 (例如通过自定义的块格式来承载),但本质载体是一个目录树,体现为文件接口。
先看一下 OCIv1 标准镜像,OCIv1 格式是一种基于 Docker Image Manifest Version 2 Schema 2 格式的镜像格式规范,由 manifest、镜像索引 (optional)、一系列容器镜像层及配置文件组成,细节可以参见相关文档,本文不再赘述。本质上说 OCI 镜像是一个以层为基本单位的镜像格式,每个层存储了文件级别的 diff data,以 tgz 归档格式存储,如下所示:
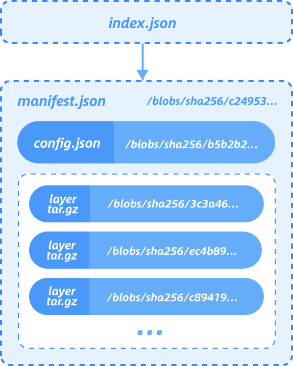
由于 tgz 的限制,OCIv1 存在一些固有问题,例如无法按需加载、较粗的层级的去重粒度、每层 hash 值易变等等。
而一些“二次套娃”方案 (例如基于自定义块格式的容器镜像方案),也存在一些原理性的设计缺陷。例如:
容器镜像最终要体现为一棵目录树,那么就需要相应的文件系统来承载 (例如 ext4),这样整个链路为“自定义块格式 + 用户态块设备 + 文件系统”,相对于文件系统方案其链路更长更复杂,端到端稳定性不可控;
由于块格式对上层的文件系统不感知,无法区分文件系统的元数据和数据并分别处理 (例如压缩);
无法实现基于文件的镜像分析特性例如安全扫描、热点分析和运行时拦截等;
对于多个“二次套娃”容器镜像,无法做到不修改 blob 内容直接 merge 成一个大镜像,也无法做到不修改 blob 内容的情况下筛选部分文件形成一个子镜像,而这是文件系统方案的天然能力。
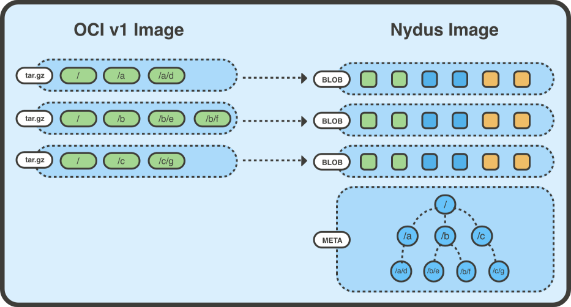
而我们实现的 Nydus 则是一种基于文件系统的容器镜像存储方案。
其中将容器镜像文件系统的数据 (blobs) 和元数据 (bootstrap) 分离,让原来的镜像层只存储文件的数据部分。并且把文件以 chunk 为粒度分割,每层 blob 存储对应的 chunk 数据;因为采用了 chunk 粒度,这细化了去重粒度,chunk 级去重让层与层之间,镜像与镜像之间共享数据更容易,也更容易实现按需加载。由于元数据被单独分离出来合为一处,因此对于元数据的访问不需拉取对应的 blob 数据,需要拉取的数据量要小很多,I/O 效率更高。Nydus RAFS 镜像格式如下图所示:
在 RAFS v6 格式引入之前,Nydus 使用的是一个完全用户态实现的镜像格式,通过 FUSE 或 virtiofs 接口提供服务。但用户态文件系统方案在设计上存在以下缺陷:
大量系统调用开销不可忽略,例如深度为 1 的随机小 I/O 访问;
当容器镜像中存在大量文件时,频繁的文件操作会产生大量的 fuse 请求,造成内核态 / 用户态上下文的频繁切换,造成性能瓶颈;
非 FSDAX 场景下,用户态到内核态的 buffer copy 会消耗 CPU 占用;
在 FSDAX (virtiofs 作为接口) 场景下,大量小文件会大量占用 DAX window 资源,存在潜在的性能抖动;频繁切换访问小文件也会产生大量 DAX mapping setup 开销。
这些问题是用户态文件系统方案的天然限制带来的,而如果将容器镜像格式的实现下沉到内核态,就可以从原理上根治上述问题。因而我们 引入了 RAFS v6 镜像格式,一个依托于内核 EROFS 文件系统,实现于内核态的容器镜像格式。
EROFS 文件系统自 Linux 4.19 内核开始存在于 Linux 主线中,过去主要用于嵌入式和移动终端领域,存在于当前各大流行发行版中 (例如 Fedora、Ubuntu、Archlinux、Debian、Gentoo 等等)。用户态工具 erofs-utils 也已经存在于这些发行版和 OIN Linux system definition 列表中,社区较活跃。
EROFS 文件系统具备如下特征:
适用于多种场景的原生本地只读块文件系统,磁盘格式具备最小 I/O 单位定义;
page-sized 块对齐的不压缩元数据;
通过 Tail-packing 内联技术有效节省空间,同时维持高访问性能 ;
数据均以块为单位寻址 (mmap I/O 友好,不需 I/O 后处理);
随机访问友好的磁盘目录格式;
核心磁盘格式非常简单,且易于增加 payload,扩展性更好;
支持 DIRECT I/O 访问,支持块设备、FSDAX 等多种后端;
同时 EROFS 预留了 boot sector,可支持 bootloader 自启动等需求。
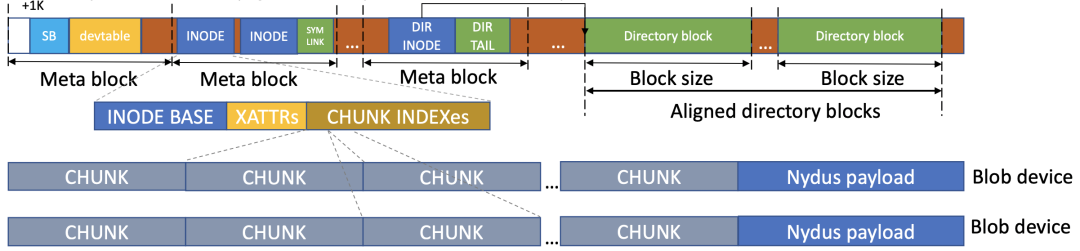
过去一年,阿里云内核团队对 EROFS 文件系统进行了一系列的改进与增强,拓展其在云原生下的使用场景,使其适应容器镜像存储系统的需求,最终呈现为一个实现于内核态的容器镜像格式 RAFS v6。而除了将镜像格式下沉到内核态,RAFS v6 还在镜像格式上进行了一系列优化,例如块对齐、更加精简的元数据等等。
新的 RAFS v6 镜像格式如下:
改进后的 Nydus 镜像服务架构如下图所示,增加了对 (EROFS based) RAFS v6 镜像格式的支持:
erofs over fscache 是阿里云内核团队为 Nydus 开发的下一代容器镜像 按需加载 技术,同时也是 Linux 内核原生的镜像按需加载特性,于 5.19 版本合入 Linux 内核主线。
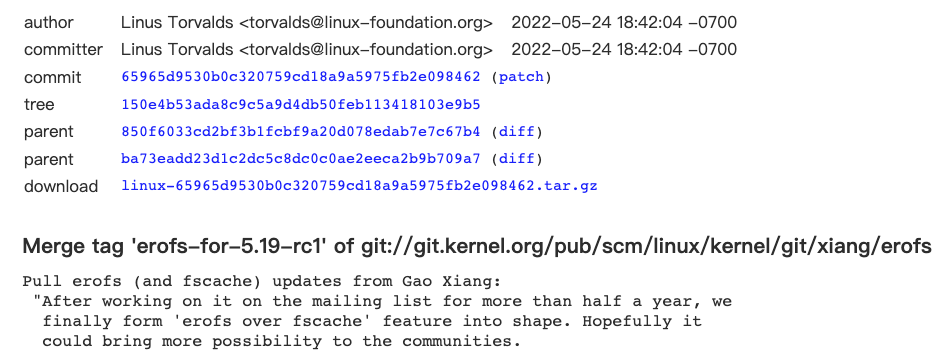
并被 Linux 内核权威媒体 LWN.net 整合入 5.19 合并窗口高亮特性(链接地址见文末):

在此之前业界已有的按需加载几乎都是用户态方案。用户态方案会涉及频繁的内核态 / 用户态上下文切换,以及内核态 / 用户态之间的内存拷贝,从而造成性能瓶颈。这一问题在容器镜像已经全部下载到本地的时候尤其突出,此时容器运行过程中涉及的文件访问,都还是会陷出到用户态的服务进程。
事实上我们可以将按需加载的 1) 缓存管理和 2) 缓存未命中的时候,通过各种途径 (例如网络) 获取数据 ,这两个操作解耦开。缓存管理可以下沉到内核态执行,这样当镜像在本地 ready 的时候,就可以避免内核态 / 用户态上下文的切换。而这也正是 erofs over fscache 技术的价值所在。
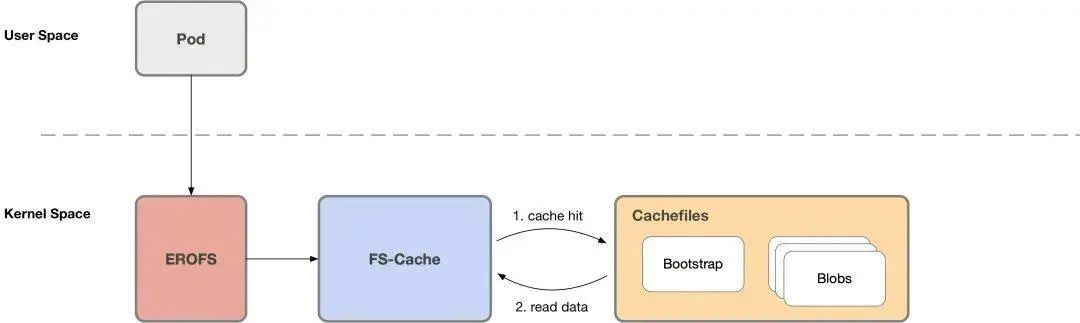
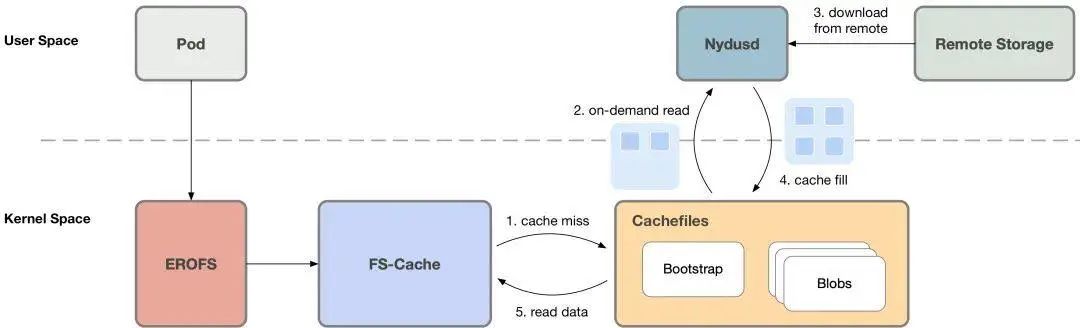
fscache/cachefiles (以下统称 fscache) 是 Linux 系统中相对成熟的文件缓存方案,广泛应用于网络文件系统 (例如 NFS、Ceph 等)。我们对其进行了功能增强与拓展,使其支持本地文件系统 (例如 erofs) 的按需加载特性。在该方案中,fscache 接管了缓存管理的工作。
此时容器在访问容器镜像的时候,fscache 会检查当前请求的数据是否已经缓存,如果缓存命中 (cache hit),那么直接从缓存文件读取数据。这一过程全程处于内核态之中,并不会陷出到用户态。
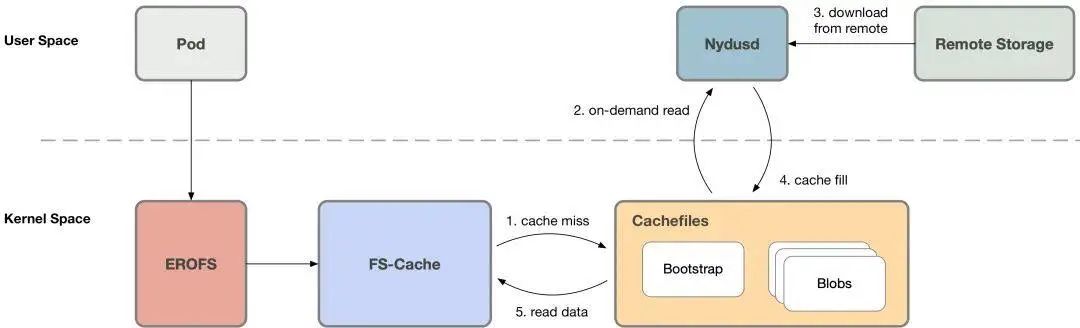
否则 (cache miss) 需要通知用户态的 Nydusd 进程以处理这一访问请求,此时容器进程会陷入睡眠等待状态;Nydusd 通过网络从远端获取数据,通过 fscache 将这些数据写入对应的缓存文件,之后通知之前陷入睡眠等待状态的进程该请求已经处理完成;之后容器进程即可从缓存文件读取到数据。
正如之前所描述的,在镜像数据已经全部下载到本地的情况下,用户态方案会导致访问文件的进程频繁陷出到用户态,并涉及内核态 / 用户态之间的内存拷贝。而 erofs over fscache 下则不会再陷出到用户态,让按需加载真的 “按需”,从而在提前下载容器镜像的场景下实现 几乎无损的性能和稳定性,最终获得 1) 按需加载与 2) 提前下载容器镜像这两种场景下真正 统一、无损 的方案。
具体来说 erofs over fscache 相对于用户态方案具有以下优势。
2.1 异步预取
容器创建之后,当容器进程尚未触发按需加载 (cache miss) 的时候,用户态的 Nydusd 就可以开始从网络下载数据并写入缓存文件,之后当容器访问的文件位置恰好处于预取范围内的时候,就会触发 cache hit 直接从缓存文件读取数据,而 不会再陷出到用户态。用户态方案则无法实现该优化。

2.2 网络 IO 优化
当触发按需加载 (cache miss) 的时候,Nydusd 可以一次性从网络下载比当前实际请求的数据量更多的数据,并将下载的数据写入缓存文件。例如容器访问 4K 数据触发的 cache miss,而 Nydusd 实际一次性下载 1MB 数据,以减小单位文件大小的网络传输延时。之后容器访问接下来的这 1MB 数据的时候,就 不必再陷出到用户态。
用户态方案则无法实现该优化,因为即使触发 cache miss 的时候,用户态的服务进程同样实现了该优化,由于用户态方案实现的缓存管理在用户态,下一次容器访问位于读放大范围内的文件数据的时候,同样需要陷出到用户态以检查当前访问的数据是否已经缓存。
2.3 更佳的性能表现
当镜像数据已经全部下载到本地的时候 (即不考虑按需加载的影响),erofs over fscache 的性能表现显著优于用户态方案,同时与原生文件系统的性能相近,从而实现与原生容器镜像方案 (未实现按需加载) 相近的性能表现。以下是几个工作负载下的性能测试数据 [1]。
read/randread IO
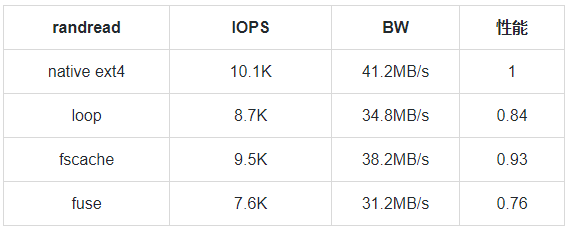
以下是文件 read/randread buffer IO [2] 的性能对比:
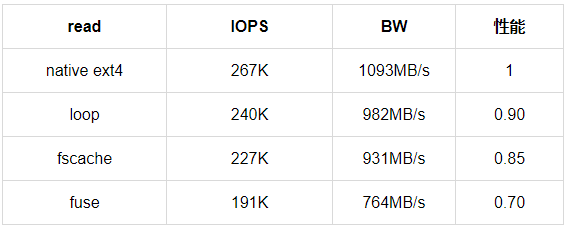
"native" 表示测试文件直接位于本地的 ext4 文件系统中。
"loop" 表示测试文件位于 erofs 镜像内,通过 loop 设备的 DIRECT IO 模式挂载 erofs 镜像。
"fscache" 表示测试文件位于 erofs 镜像内,通过 erofs over fscache 方案挂载 erofs 镜像。
"fuse" 表示挂载测试文件位于 fuse 文件系统 [3] 内。
"性能" 一栏对各个模式下的性能进行归一化处理,以原生 ext4 文件系统的性能为基准,比较其他模式下的性能。
可以看到,fscache 模式下的 read/randread 性能与 loop 模式下的性能基本持平,同时要优于 fuse 模式;但是与原生 ext4 文件系统的性能仍存在一定差距,我们正在进一步分析和优化,理论上该方案可以达到原生文件系统的水平。
文件元数据操作测试
通过对大量小文件执行 tar 操作 [4] 测试文件元数据操作的性能。
可以看到 erofs 格式的容器镜像的元数据性能甚至优于原生 ext4 文件系统,这是 erofs 特殊的文件系统格式导致的。由于 erofs 是一个只读 (read-only) 文件系统,因而其所有元数据可以紧密排布在一起,而 ext4 作为可写文件系统,其元数据则分散排布在多个 BG (block group) 中。
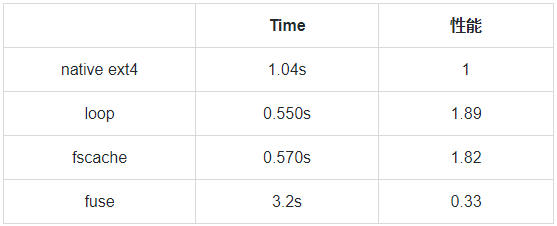
典型工作负载测试
测试 Linux 源码编译 [5] 这一典型工作负载下的性能表现。
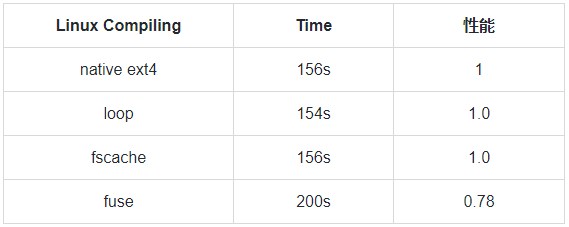
可以看到,fscache 模式下的 Linux 编译负载性能与 loop 模式、原生 ext4 文件系统的性能基本持平,同时要优于 fuse 模式。
2.4 高密部署
由于 erofs over fscache 方案基于文件实现,即每个容器镜像都表现为 fscache 下的一个缓存文件,因而其 天然支持高密部署的场景。例如一个典型的 node.js 容器镜像在该方案下对应 ~20 个缓存文件,那么在一个部署有上百个容器的机器中,只需要维护上千个缓存文件。
2.5 故障恢复与热升级
当镜像文件全部下载到本地的时候,镜像中文件的访问不再需要用户态服务进程的介入,因而用户态服务进程存在更加充裕的时间窗口来 实现故障恢复与热升级功能。这种场景下甚至不再需要用户态进程,从而实现与原生容器镜像方案 (未实现按需加载) 相近的稳定性表现。
2.6 统一的容器镜像方案
有了 RAFS v6 镜像格式和 erofs over fscache 按需加载技术,Nydus 同时适用于 runc 与 rund,作为这两种容器场景下的统一的容器镜像分发方案。
另外更重要的,erofs over fscache 是 1) 按需加载与 2) 提前下载容器镜像这两种场景下真正统一、无损的方案。一方面,它实现了按需加载特性,在容器启动的时候不需要容器镜像全部下载到本地,从而助力极致的容器启动速度。另一方面,它又完美兼容容器镜像已经下载到本地的这一场景,在文件访问过程中不再频繁陷出到用户态,从而实现与原生容器镜像方案 (未实现按需加载) 近乎无损的性能和稳定性表现。
之后我们会对 erofs over fscache 方案进行持续迭代与完善,例如不同容器之间的镜像复用、FSDAX 支持以及性能优化等。
此外,目前 erofs over fscache 方案已经合入 Linux 5.19 主线,后续我们也会将 该方案回合到 OpenAnolis (5.10 和 4.19 内核) ,使得龙蜥内核真正开箱可用,届时欢迎大家使用。
最后感谢方案开发过程中支持和帮助过我们的所有个人与团队,感谢字节跳动与快手的同学对该方案的大力支持,包括但不限于社区声援、测试、代码贡献等,欢迎感兴趣的小伙伴加入龙蜥社区 SIG 钉钉群(群号:34264214)和 Nydus 镜像服务钉钉群(群号:34971767)交流,让我们携手一起构建一个更好的容器镜像生态。
[1] 测试环境 ECS ecs.i2ne.4xlarge (16 vCPU, 128 GiB Mem),本地 NVMe 盘
[2] 测试命令 "fio -ioengine=psync -bs=4k -direct=0 -rw=[read|randread] -numjobs=1"
[3] 使用 passthrough 作为 fuse daemon,e.g. "passthrough_hp <src_dir> <tgt_dir>"
[4] 测试 "tar -cf /dev/null <linux_src_dir>" 命令的执行时间
[5] 测试 "time make -j16" 命令的执行时间
相关链接地址:
1. 龙蜥社区高性能存储技术 SIG 地址:
https://openanolis.cn/sig/high-perf-storage
2.erofs over fscache 合入 5.19 内核提交链接:
https://git.kernel.org/pub/scm/linux/kernel/git/torvalds/linux.git/commit/?id=65965d9530b0c320759cd18a9a5975fb2e098462
3. FUSE passthough_hp daemon:
https://github.com/libfuse/libfuse/blob/master/example/passthrough_hp.cc
4. Nydus image service(请大家多多关注,欢迎贡献):
https://github.com/dragonflyoss/image-service
5. LWN.net 报道链接:
https://lwn.net/SubscriberLink/896140/3d7b8c63b70776d4/

你也「在看」吗?👇