人类组队过程中的互动激发了新型航空航天设计的灵感,这些设计旨在改进人类与机器或多台机器的协同工作方式。遗憾的是,目前的系统工程流程无法处理这些复杂的关系,也无法设计和确保这些系统的安全性。为了弥补这一不足,本文介绍了一种新颖的系统理论分析流程,用于识别不安全的协同控制行动。它是一系列更广泛的技术的一部分,这些技术扩展了最先进的危险分析技术,即系统理论过程分析(STPA),以系统地解决协作问题。该方法严格表达了多个命令在一起可能不安全的不同方式。利用系统理论,它采用抽象方法来管理枚举来自多个协作组件的控制贡献的组合复杂性。一种算法将这些概念整合到端到端流程中,并在自动化的支持下对控制操作的不安全组合进行枚举、细化、修剪和优先排序。该方法的输出为系统要求的规范提供了依据,从而在概念开发的早期就开始实施安全引导设计。该流程在载人无人驾驶飞机组队案例研究中进行了演示,并发现了过去对同一系统进行危险分析时未发现的新因果因素。
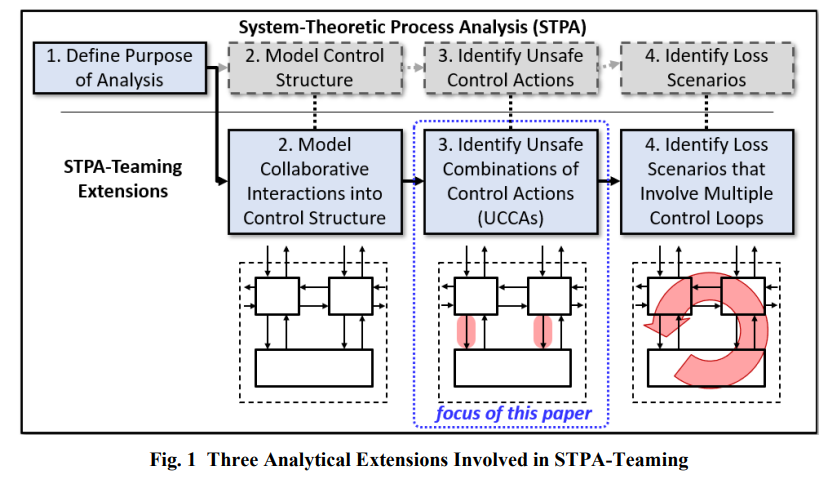
研究的总体目标是开发一种严格而系统的方法来分析协作控制系统的安全性。协作控制系统的安全性。最近,这项工作引入了一个以系统理论为基础的框架,该框架定义了 系统理论为基础的框架,该框架定义了控制器交互结构的分类法和协作控制中观察到的一系列动态[2]。目前的 目前的工作以该框架为基础,扩展了最先进的危险分析技术--系统理论过程分析 (STPA)。过程分析 (STPA)。目前正在开发几种分析扩展技术,统称为 STPA-Teaming (图 1)。
本文特别介绍了一种新方法,用于全面确定作为系统协作的控制器的控制动作组合如何可能不安全。这是识别导致不安全控制输出的因果因素所需的关键能力,然后在设计中得出消除或减轻这些因果因素的系统要求。本文介绍了该技术的理论基础,然后在有人驾驶无人驾驶飞机(MUM-T)案例研究中演示了该方法,该案例研究涉及有人驾驶军用飞机与无人驾驶飞机合作执行任务。
本文的其余部分安排如下。第二节回顾了常见安全分析技术的一些局限性,并对所选方法进行了论证。第三节介绍案例研究中的协作系统,然后说明新的分析方法。第四节开发了识别协作系统中不安全控制的新方法。第五节将新技术应用于案例研究,并介绍了获得的一些结果。第六节预览了本研究的未来发展工作。