
软工方法论之形式化方法NuSMV学习笔记



使用NuSMV做实验NuSMV home page,需要点LTL/CTL逻辑基础。https://nusmv.fbk.eu/
根据软工方法论学到的知识,常见软件工程方法有:
- 朴素的方法
- 特定领域方法
- 形式化方法
- 半形式化的方法
- 结构化方法
- 面向对象方法
- 面向服务方法
其中各种方法都就不提了,在这儿学习并实践形式化方法进行软件工程设计。
理论
下面理论部分参考文献,一般地,形式系统(框架)使得表示一个规范与其相应程序之间的映射成为可能。精确是形式化方法或形式符号系统的一个特征,是产生无二义性规范的主要依据。一个交流媒体应该是清晰的,并且是无二义性的。规范的清晰和无二义性并不等于说它是精确、抽象或简明的,但规范的这五个性质是相互关联的。另外,形式规范主要的语用益处在于:可以对形式规范进行较详细的构造性检查,因为对此规范中的具体内容的含义不会有争议,有争议的只是内容的完备性。总体上,形式化方法大致可分为五类[^Boiten*1992].
基于模型的方法—给出系统(程序)状态和状态变换操作的显式但亦是抽象的定义,但对于并发没有显式的表示,如:Z和VDM[^Jones 1990]。
- 代数方法—通过联系不同操作间的行为关系而给出操作的隐式定义,而不定义状态,同样,它亦未给出并发的显式表示,如:
OBJ、CLEAR。 - 过程代数方法—给出并发过程的一个显式模型,并通过过程间允许的可观察的通讯上的限制(约束)来表示行为,如:
CSP、CCS(并发)。 - 基于逻辑的方法—有很多方法采用逻辑来描述系统的特性,包括程序行为的低级规范和系统时间行为的规范,如:时态逻辑[^Galton 1992]。
各种形式符号系统对于精确、抽象地表达概念具有各自不同的能力,但它们均可用于严密地描述概念,更重要的是,它们比自然语言的描述更严密、更精确、更抽象。规范的抽象、精确及简明性都有助于使规范更清晰,当然,良好的结构也有助于清晰性。
更详尽的形式化理论需要查看相关教材[^LOGIC]和文献典籍[^POMC]。
实践/结果
在此阶段,已有大量的关于形式处理的工作[^Boiten1992][^Dromey 1989],即:将一程序与其的规范形式地对应起来。这一技术即是所谓的构造方法,构造方法基于从低级规范推导出程序*这一想法,将程序构造与验证统一起来.
验证环境是基于与构造技术类似的数学基础,但它主要关心程序和规范之间的自动/辅助正确性证明[^Muk 1995]。提个相对比较火的应用:ATEC主要是做Verilog代码和C代码的等价性验证,应用最成功的是FPU的验证,可以几秒到几分钟之内快速发现bug。华为、联发科 Mediatek, Vivante 和 Power CORE都有使用过ATEC抓到FPU/GUP的bug。
verification的流程可以这么总结:
1 对于你要verify的系统进行formalization,建立formal model;
2 提出需要验证的properties,或specifications(恩以下简称spec),就是你想要系统满足哪些条件;
3 证明或checking是否你的formal model满足这些properties。
形式实现技术在顺序程序上应用较广,目前也有对并发程序方面的研究。这一技术的使用代价很高,所以主要用于高精确系统的开发,因为高精确系统中的一个很小的错误可能会引起极大的灾难。若要使形式实现技术能广泛地应用,还须对其做较大的改进,以提高其效率,降低其使用代价。
形式化相关应用看这里 。以下实验使用NuSMV https://nusmv.fbk.eu/,NuSMV实操编程实践。
demo
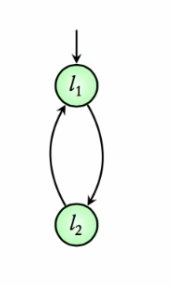
MODULE main
VAR
location: {l1,l2};
ASSIGN
init(location) := l1;
next(location) := case
(location = l1):l2;
(location = l2):l1;
esac;保存为intro.smv 交互式运行:
./>nusmv -int
NuSMV > read_model -i intro.smv
NuSMV > flatten_hierarchy
NuSMV > encode_variables
NuSMV > build_model
NuSMV > pick_state -i
输出初始状态:
*************** AVAILABLE STATES *************
================= State =================
0) -------------------------
location = l1
There's only one available state. Press Return to Proceed.
Chosen state is: 0
输入:
NuSMV > print_reachable_states -v
打印状态转移图,对应的状态及其下一个状态,输出:
######################################################################
system diameter: 2
reachable states: 2 (2^1) out of 2 (2^1)
------- State 1 ------
location = l2
------- State 2 ------
location = l1
-------------------------
######################################################################
输入:
NuSMV > simulate -i -k 3
动态“迁移系统仿真3步,输出仿真结果:
******** Simulation Starting From State 1.11 ********
*************** AVAILABLE STATES *************
================= State =================
0) -------------------------
location = l2
There's only one available state. Press Return to Proceed.
Chosen state is: 0
*************** AVAILABLE STATES *************
================= State =================
0) -------------------------
location = l1
There's only one available state. Press Return to Proceed.
Chosen state is: 0
*************** AVAILABLE STATES *************
================= State =================
0) -------------------------
location = l2
There's only one available state. Press Return to Proceed.
Chosen state is: 0
NuSMV >quit
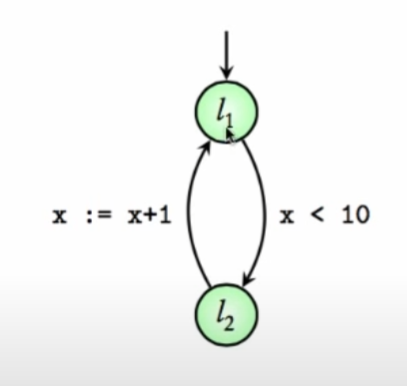
MODULE main
VAR
location: {l1,l2};
x: 0 .. 100;
ASSIGN
init(location) := l1;
init(x) := 0;
next(location) := case
(location = l1) & (x<10):l2;
(location = l2):l1;
TRUE:location;
esac;
next(x) := case
(location = l2) & (x<100):x+1
TRUE:x;
esac;
保存为intro2.smv 交互式运行:
./>nusmv -int
NuSMV > read_model -i intro2.smv
NuSMV > flatten_hierarchy
NuSMV > encode_variables
NuSMV > build_model
NuSMV > pick_state -i
输出初始状态:
*************** AVAILABLE STATES *************
================= State =================
0) -------------------------
location = l1
x = 0
There's only one available state. Press Return to Proceed.
Chosen state is: 0
输入:
NuSMV > print_reachable_states -v
打印状态转移图,对应的状态及其下一个状态,输出:
######################################################################
system diameter: 2
reachable states: 2 (2^1) out of 2 (2^1)
------- State 1 ------
location = l2
------- State 2 ------
location = l1
-------------------------
######################################################################
输入:
NuSMV > simulate -i -k 15
动态“迁移系统仿真15步,输出仿真结果:
******** Simulation Starting From State 1.1 ********
*************** AVAILABLE STATES *************
================= State =================
0) -------------------------
location = l2
x = 0
There's only one available state. Press Return to Proceed.
Chosen state is: 0
省略后续显然的那些步骤,可以预料事实上也是运行20次后稳定在l1停机状态。
那有没有直接看出来系统停机前一共有多少步骤的方法呢?
答案就是输入:
NuSMV > print_reachable_states -v
输出:
######################################################################
system diameter: 21
reachable states: 21 (2^4.39232) out of 202 (2^7.65821)
------- State 1 ------
location = l1
x = 10
------- State 2 ------
location = l1
x = 8
------- State 3 ------
location = l1
x = 2
------- State 4 ------
location = l1
x = 0
------- State 5 ------
location = l1
x = 6
------- State 6 ------
location = l1
x = 4
------- State 7 ------
location = l1
x = 9
------- State 8 ------
location = l1
x = 1
------- State 9 ------
location = l1
x = 5
------- State 10 ------
location = l1
x = 7
------- State 11 ------
location = l1
x = 3
------- State 12 ------
location = l2
x = 9
------- State 13 ------
location = l2
x = 8
------- State 14 ------
location = l2
x = 1
------- State 15 ------
location = l2
x = 0
------- State 16 ------
location = l2
x = 5
------- State 17 ------
location = l2
x = 4
------- State 18 ------
location = l2
x = 7
------- State 19 ------
location = l2
x = 6
------- State 20 ------
location = l2
x = 3
------- State 21 ------
location = l2
x = 2
-------------------------
######################################################################
NuSMV > quit
显然可以从这个结果中得出最多走21步后停机,参考Simple models in NuSMV
进程request响应
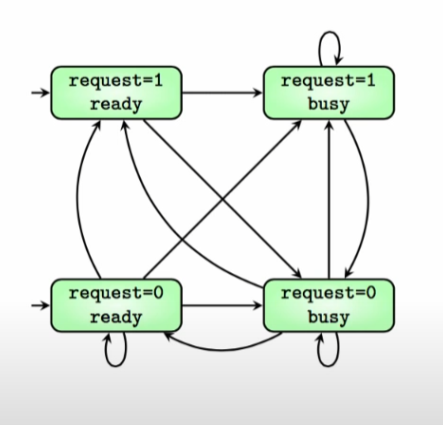
MODULE main
VAR
request : boolean;
status : {ready,busy};
ASSIGN
init(status) := ready;
next(status) := case
request : busy;
TRUE:{ready,busy};
esac;
LTLSPEC
G(request -> F status=busy)
注意,LTLSPEC是LTL线性时态逻辑公式断言,这句话的含义是这个迁移系统满足活性:
对于任何状态,如果对某些资源进行请求request,那么它最终被确定载入系统进入busy状态。
对应逻辑公式符号的写法如下:
同理,读取smv文件,分层展开,变量生成,编译模型,
输出:
NuSMV > print_reachable_states -v
######################################################################
system diameter: 2
reachable states: 4 (2^2) out of 4 (2^2)
------- State 1 ------
request = TRUE
status = busy
------- State 2 ------
request = TRUE
status = ready
------- State 3 ------
request = FALSE
status = busy
------- State 4 ------
request = FALSE
status = ready
-------------------------
######################################################################
正如我们画出来的状态转移图,一共4个状态。
NuSMV > pick_state -i
会让我们选择0/1两个入口初始状态:
*************** AVAILABLE STATES *************
================= State =================
0) -------------------------
request = TRUE
status = ready
================= State =================
1) -------------------------
request = FALSE
Choose a state from the above (0-1):
同样可以仿真运行3步:
simulate -i -k 3
交互运行。
model-checking检查性质
Transition system satisfies a requirements means
all its executions satisfy the requirement.
比如这个图中我们可以检测迁移系统(程序/算法/自动机/状态迁移图)中,是否globally(G)满足(x>0):
NuSMV > read_model -i intro2.smv
NuSMV > flatten_hierarchy
NuSMV > encode_variables
NuSMV > build_model
NuSMV > check_ltlspec -p "G(x>=0)"
-- specification G x >= 0 is true
NuSMV > check_ltlspec -p "F(x = 5)"
-- specification F x = 5 is true
这就是说我们证明了:
Transition System of above ProGram with initial value x = 0 satisfies G(x>=0)
...等等LTL逻辑公式描述的系统性质
观察这个程序不难发现,实际上x到10就停机在l1状态了,所以(x = 11)必定不可能达到:
NuSMV > check_ltlspec -p "F(x >= 11)"
-- specification F x >= 11 is false
-- as demonstrated by the following execution sequence
Trace Description: LTL Counterexample
Trace Type: Counterexample
-> State: 4.1 <-
location = l1
x = 0
-> State: 4.2 <-
location = l2
-> State: 4.3 <-
location = l1
x = 1
-> State: 4.4 <-
location = l2
-> State: 4.5 <-
location = l1
x = 2
-> State: 4.6 <-
location = l2
-> State: 4.7 <-
location = l1
x = 3
-> State: 4.8 <-
location = l2
-> State: 4.9 <-
location = l1
x = 4
-> State: 4.10 <-
location = l2
-> State: 4.11 <-
location = l1
x = 5
-> State: 4.12 <-
location = l2
-> State: 4.13 <-
location = l1
x = 6
-> State: 4.14 <-
location = l2
-> State: 4.15 <-
location = l1
x = 7
-> State: 4.16 <-
location = l2
-> State: 4.17 <-
location = l1
x = 8
-> State: 4.18 <-
location = l2
-> State: 4.19 <-
location = l1
x = 9
-> State: 4.20 <-
location = l2
-- Loop starts here
-> State: 4.21 <-
location = l1
x = 10
-> State: 4.22 <-
果不其然,通过符号逻辑演算的结果,我们证明了最后不可能达到(x>=11)的迁移系统状态。同时我们知道最终一定(x = 10):
NuSMV > check_ltlspec -p "G F((x = 10) & (location = l1))"
-- specification G ( F (x = 10 & location = l1)) is true
同样可证明满足这个性质。
同理,读取smv文件,分层展开,变量生成,编译模型,
NuSMV > read_model -i counter.smv
NuSMV > flatten_hierarchy
NuSMV > encode_variables
NuSMV > build_model
NuSMV > check_ltlspec -p "G (request = FALSE)"
-- specification G request = FALSE is false
-- as demonstrated by the following execution sequence
Trace Description: LTL Counterexample
Trace Type: Counterexample
-> State: 2.1 <-
request = TRUE
status = ready
-- Loop starts here
-> State: 2.2 <-
request = FALSE
status = busy
-> State: 2.3 <-
这张图不满足G(request = 0),只要返回一个执行反例即可证明不满足。随便找到一个执行序列,左上角的状态-->右下角状态,有request = 0证明这个性质不是全局性满足。
只要是LTL公式,就能写出来并且验证是否真实,这样就能对迁移系统(程序/算法/自动机/状态迁移图...)进行性质判断处理。
NuSMV > check_ltlspec -p "G(request -> F status=busy)“
注意,LTLSPEC是LTL线性时态逻辑公式断言。这句话的含义是这个迁移系统满足活性:
对于任何状态,如果对某些资源进行请求request,那么它最终被确定载入系统进入busy状态。
对应逻辑公式符号的写法如下:
NuSMV > check_ltlspec -p "G(request -> F status=busy)"
-- specification G (request -> F status = busy) is true
这就证明了,这样写的迁移系统是有”活性“,是一个好的程序。能满足有求必应的用户需求,不会导致程序死锁。
求解摆渡人趣题
摆渡者难题
问题描述:
一个船夫、山羊、卷心菜和狼都在河的一边。船夫至多可搭载一位乘客过河。如果船夫离开,山羊会吃掉卷心菜,狼也会吃掉山羊。船夫能否将它们(包括狼、山羊、卷心菜)安全送到河对岸?
建模:
船夫(ferryman)、山羊(goat)、卷心菜(cabbage)和狼(wolf)都有两个状态,一个在河此岸、一个在河彼岸,用布尔变量表示;
船夫可以携带山羊、卷心菜、狼或者什么都不带,用一个枚举类型的变量表示carry:{goat,cabbage,wolf,0};
MODULE main
VAR
ferryman : boolean ; goat : boolean ;
cabbage : boolean ; wolf : boolean ;
carry : { g , c , w , none };
ASSIGN
init ( ferryman ) := FALSE ; init ( goat ) := FALSE ;
init ( cabbage ) := FALSE ; init ( wolf ) := FALSE ;
init ( carry ) := none;
next ( ferryman ) := !ferryman;
next ( goat ) := case
ferryman = goat & next ( carry ) = g : next ( ferryman );
TRUE : goat ;
esac ;
next ( cabbage ) := case
ferryman = cabbage & next ( carry ) = c : next ( ferryman );
TRUE : cabbage ;
esac ;
next ( wolf ) := case
ferryman = wolf & next ( carry ) = w : next ( ferryman );
TRUE : wolf ;
esac ;
LTLSPEC !(( ( goat = cabbage | goat = wolf ) -> goat = ferryman )
U ( cabbage & goat & wolf & ferryman ))
要验证的PPTL性质:
LTLSPEC !(( ( goat = cabbage | goat = wolf ) -> goat = ferryman )
U ( cabbage & goat & wolf & ferryman ))
含义:不存在某个状态,卷心菜、羊、狼和船夫都到了河的对岸 的情况。
模型不满足该性质,说明问题存在解,反例路径即为该解。
NuSMV实践:
..\>nusmv ferryman2.smv
*** This is NuSMV 2.6.0 (compiled on Wed Oct 14 15:37:51 2015)
*** Enabled addons are: compass
*** For more information on NuSMV see <http://nusmv.fbk.eu>
*** or email to <nusmv-users@list.fbk.eu>.
*** Please report bugs to <Please report bugs to <nusmv-users@fbk.eu>>
*** Copyright (c) 2010-2014, Fondazione Bruno Kessler
*** This version of NuSMV is linked to the CUDD library version 2.4.1
*** Copyright (c) 1995-2004, Regents of the University of Colorado
*** This version of NuSMV is linked to the MiniSat SAT solver.
*** See http://minisat.se/MiniSat.html
*** Copyright (c) 2003-2006, Niklas Een, Niklas Sorensson
*** Copyright (c) 2007-2010, Niklas Sorensson
-- specification !(((goat = cabbage | goat = wolf) -> goat = ferryman) U (((cabbage & goat) & wolf) & ferryman)) is false
-- as demonstrated by the following execution sequence
Trace Description: LTL Counterexample
Trace Type: Counterexample
-- Loop starts here
-> State: 1.1 <-
ferryman = FALSE
goat = FALSE
cabbage = FALSE
wolf = FALSE
carry = none
-> State: 1.2 <-
ferryman = TRUE
goat = TRUE
carry = g
-> State: 1.3 <-
ferryman = FALSE
carry = c
-> State: 1.4 <-
ferryman = TRUE
wolf = TRUE
carry = w
-> State: 1.5 <-
ferryman = FALSE
goat = FALSE
carry = g
-> State: 1.6 <-
ferryman = TRUE
cabbage = TRUE
carry = c
-> State: 1.7 <-
ferryman = FALSE
carry = none
-> State: 1.8 <-
ferryman = TRUE
goat = TRUE
carry = g
-> State: 1.9 <-
ferryman = FALSE
wolf = FALSE
carry = w
-> State: 1.10 <-
ferryman = TRUE
carry = c
-> State: 1.11 <-
ferryman = FALSE
cabbage = FALSE
-> State: 1.12 <-
ferryman = TRUE
carry = none
-> State: 1.13 <-
ferryman = FALSE
goat = FALSE
carry = g
-> State: 1.14 <-
ferryman = TRUE
carry = none
-> State: 1.15 <-
ferryman = FALSE
执行结果。
分析
结合model Checking分析形式化在软件工程方法论中的作用。
- 程序设计中,假设今天要实现的功能逻辑更加复杂,比我写的例子复杂很多,但是同理的,我们可以把用户需求/产品特性都写成LTL性质句子,进行模型检测Model Checking,只要结果是True的,就能用。
- 晶元流片代价昂贵,所以布尔电路功能实现的设计师们在投产之前,也会对产品进行类似的检测。只有满足需求功能,不会导致bug(芯片召回会导致公司巨额损失)。
- 在银行铁路航空航天等安全性能需要很好保障的情况下,就更加需要Model checking保证设计出来的”迁移系统(程序/算法/逻辑功能电路验证/设计运行系统(电梯系统PLC画图程序之类的)/设计的协议是否能满足LTL目标使用需求/自动机/确定性策略的Markov Network/状态迁移图...)“是合理合法没有bug的,确保不会捅出的篓子。
- 又或者今天你提出了一个新的算法,你不知道正确性有没有保证,你可以通过构建你的算法自动机对应的迁移系统(状态转移图),检测LTL公式是否"G F (是否永远能到达目标状态)"。如果True,说明你的算法写对了,如果不能,它会返回反例帮助里思考自己没考虑到的情况有哪儿,从而改进你自己的算法,保证其合理性/完备性。如果问题本来就不可解,你也可以通过修改问题适用范围,比如增加约束,解决一个更容易的问题,类比SAT可满足性问题线性时间算法不可解,你可以解决horn子句的SAT问题,把对应的线性求解算法实现为NuSMV 迁移系统(对应那张图),这样你就可以验证horn程序是被可以实现的。
最后补充一些形式化方法局限性
- 形式化方法之最基本的弱点或局限性与规范确认问题有关。
我们可根据“数学的必然性”由规范开始开发软件,但将总是怀疑初始规范的真实性(精确性)。显然,如果能够消除这种疑虑是极其有价值的,但证据表明,软件错误的主要来源正是规范。这就意味着,规范所使用的数学工具并不能足以保证规范的“安全”性。更宏观地讲,我们面临着一个权衡问题,就是要在投入形式开发的力量与投入研究验证高阶规范[Jing 1995]方法中的力量之间权衡。需要注意的是,可以使用证明技术来辅助确认过程,如:通过由一个规范推导出其安全特性,但这只能简单地缩短形式化与现实世界之间的距离,而并不能消除它。所以,我们不能简单地依赖于形式化机制以取得证明规范的安全性。 - 第二个主要的局限性与规范的解释有关。
对于形式规范,在其数学基础意义下,并不是只有一种解释。软件工程师可以根据计算模型解释;系统用户可以根据系统操作环境中的系统使用模型来解释。这样,二义性问题已不是形式规范在其内部逻辑中存在唯一模型的问题,而是不同领域、不同背景和知识下的各种解释的相容性问题。形式规范的确是比其他相对松散的规范二义性问题要少,但这并不能说明在其多种解释下不可能存在二义性问题,这就削弱了形式化方法的能力,但我们并不能因此而否定它。
本文使用 Zhihu On VSCode 创作并发布
参考文献
- [1] 软件开发中的形式化方法,郑红军、张乃孝,计算机科学,Vol.24 No.6 p90-96,1997 Formal Methods in Software Development, Zheng Hongjun, Zhang Naixiao,Computer Science, Vol.24 No.6 p90-96, 1997
[^Boiten*1992]: H. Ehrig, B. Mahr, I. Classen, F. Orejas, Introduction to Algebraic Specification. Part 1: Formal Methods for Software Development, The Computer Journal, Volume 35, Issue 5, October 1992, Pages 460–467, https://doi.org/10.1093/comjnl/35.5.460
[^Jones 1990]: C.B.Jones, Systematic Software Development Using VDM
[^Galton 1992]: A.Galton, Logic as a Formal Method. The Computer Journal, Vol. 35, No. 5
[^Dromey 1989]: G.Dromey, Program Derivation
[^Muk 1995]: P.Mukherjee, Computer-aided Validation of Formal Specifications. Soft. Engi. Journal, July
[^LOGIC]: GIC IN COMPUTER SCIENCE Modelling and Reasoning about Systems
[^POMC]: 《Principles of Model Checking》
程序分析研究进展Recent Progress in Program Analysis
